基于非接触参考梁法的微悬臂梁的刚度标定方法
本发明涉及微纳力值测量,具体为基于非接触参考梁法的微悬臂梁的刚度标定方法。
背景技术:
1、纳米科技已逐渐发展成为21世纪最重要的前沿科学技术之一。微悬臂梁作为最简单的mems器件,因其微型化、高精度、超灵敏、低成本、无需标记、操作简便被广泛用于生物医疗、环境、化学、材料科学和半导体工业等领域,是微纳测试的常用工具,对微小力值测量领域起着极其重要的作用。作为微小力值传递媒介的微悬臂梁传感器,其刚度的标定对微小力值的测量尤为关键。
2、常用的刚度标定方法有精密天平法、基于电磁力标定法、压痕仪法、基于静电力标定法和参考梁法。精密天平法是目前最精确的标定方法。但是由于系统刚度的影响不可忽略,该方法仅适用于标定刚度在20n/m以下的悬臂,难以适用于刚度过高的微悬臂梁;基于电磁力标定法,不适合刚度低的;压痕仪法是通过纳米压痕仪对悬臂刚度进行标定,优点在于无需考虑悬臂的尺寸和几何形状的差异,但是在接触位置附近纳米压痕仪分辨力过低,因此该方法不适用于刚度较低的悬臂。基于静电力标定法对电容梯度进行一次项拟合;存在系统误差;线性度低;参考梁法即通过刚度已知的悬臂梁与待测梁作用。参考梁法虽操作过程较为简单,但是加载过程中无法忽视接触点滑动、悬臂梁微变形破坏所带来的影响。且该方法中参考悬臂梁的刚度并不是准确的,且不能溯源至国际单位,因此会使刚度标定产生误差。
技术实现思路
1、针对现有技术的不足,本发明提供了基于非接触参考梁法的微悬臂梁的刚度标定方法,解决了传统微悬臂梁刚度测量中的接触误差和适用范围限制的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:基于非接触参考梁法的微悬臂梁的刚度标定方法,包括以下步骤:
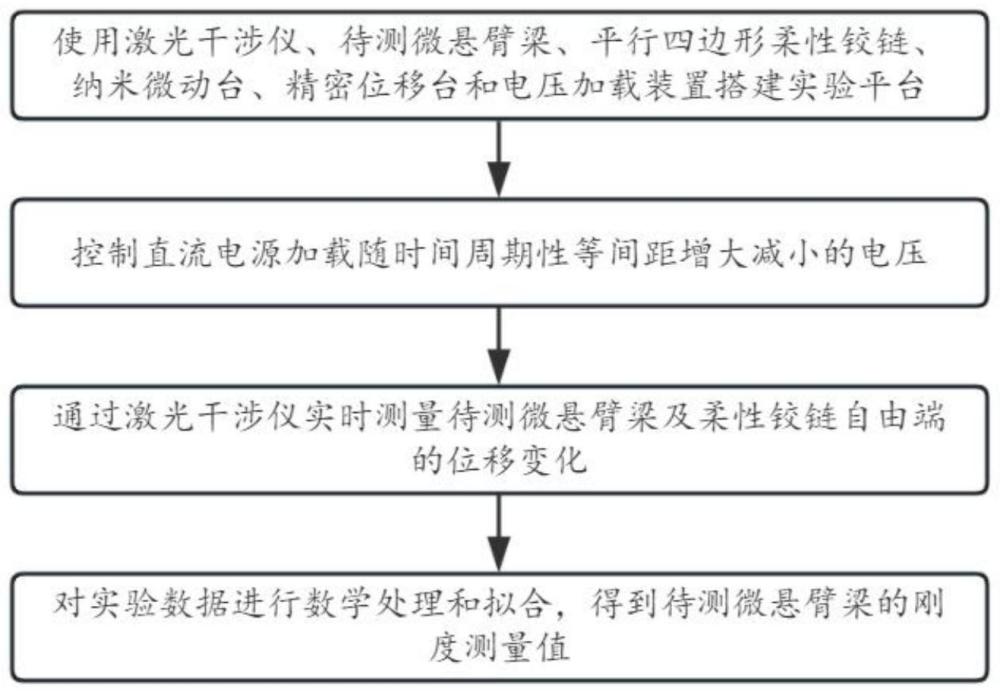
3、a.使用激光干涉仪、待测微悬臂梁、平行四边形柔性铰链、纳米微动台、精密位移台和电压加载装置搭建实验平台;
4、b.控制直流电源加载随时间周期性等间距增大减小的电压;
5、c.通过激光干涉仪实时测量待测微悬臂梁及柔性铰链自由端的位移变化;
6、d.对实验数据进行数学处理和拟合,得到待测微悬臂梁的刚度测量值。
7、优选的,所述d步骤具体包括以下步骤:
8、d1.使用激光干涉仪测量待测微悬臂梁自由端在每个电压下产生的位移,并记录每个电压下的位移平均值作为该电压下的测量位移;
9、d2.根据公式计算待测微悬臂梁的刚度值;
10、d3.取所有计算得到的刚度值的平均值作为最终的刚度测量值。
11、优选的,所述d2步骤中待测微悬臂梁的刚度值的计算公式为:其k柔性铰链为已知的参考悬臂梁刚度值,k待测微悬臂梁为待测微悬臂梁的刚度值。
12、实验平台,包括xy方向位移台一、倾斜位移台一、xy方向位移台二和微悬臂梁夹持装置,所述倾斜位移台一的外部设置在xy方向位移台一和xy方向位移台二之间,所述xy方向位移台二的外部设置在倾斜位移台一和微悬臂梁夹持装置之间,所述xy方向位移台一的顶部设置有纳米微动台一,所述纳米微动台一的顶部设置有z方向位移台一,所述xy方向位移台二的顶部设置有第二精密位移台。
13、优选的,所述第二精密位移台包括纳米微动台二,所述纳米微动台二的底部设置在xy方向位移台二的顶部,所述纳米微动台二的顶部设置有倾斜位移台二,所述倾斜位移台二的顶部设置有z方向位移台二。
14、优选的,所述倾斜位移台一的顶部设置有激光干涉仪一,所述微悬臂梁夹持装置的顶部左端设置有激光干涉仪二,所述激光干涉仪一和激光干涉仪二位于同一条竖直水平线上。
15、优选的,所述z方向位移台一的顶部设置有倾斜位移台三,所述倾斜位移台三的外壁设置有柔性铰链。
16、优选的,所述z方向位移台二的底部左端设置有微悬臂梁,所述柔性铰链和微悬臂梁之间连接有直流稳压电源。
17、本发明提供了基于非接触参考梁法的微悬臂梁的刚度标定方法。具备以下有益效果:
18、1、本发明通过采用的非接触参考梁法,使用静电力作为力的传递媒介,避免了传统的接触式测量可能导致的摩擦误差和测量点损伤,该方法能够提高微悬臂梁刚度测量的精度和可靠性。
19、2、本发明通过使用两台激光干涉仪实时测量位移变化,并通过精确控制电压加载和位移测量,结合数学处理和拟合,实现精确计算微悬臂梁的刚度值,配合柔性铰链的使用确保了测量的稳定性和可重复性,减少了系统误差。
技术特征:
1.基于非接触参考梁法的微悬臂梁的刚度标定方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于非接触参考梁法的微悬臂梁的刚度标定方法,其特征在于,所述d步骤具体包括以下步骤:
3.根据权利要求2所述的基于非接触参考梁法的微悬臂梁的刚度标定方法,其特征在于,所述d2步骤中待测微悬臂梁的刚度值的计算公式为:其k柔性铰链为已知的参考悬臂梁刚度值,k待测微悬臂梁为待测微悬臂梁的刚度值。
4.实验平台,其特征在于,用于上述权利要求1-3所述的任一项基于非接触参考梁法的微悬臂梁的刚度标定方法,包括xy方向位移台一(2)、倾斜位移台一(4)、xy方向位移台二(7)和微悬臂梁夹持装置(10),所述倾斜位移台一(4)的外部设置在xy方向位移台一(2)和xy方向位移台二(7)之间,所述xy方向位移台二(7)的外部设置在倾斜位移台一(4)和微悬臂梁夹持装置(10)之间,所述xy方向位移台一(2)的顶部设置有纳米微动台一(1),所述纳米微动台一(1)的顶部设置有z方向位移台一(8),所述xy方向位移台二(7)的顶部设置有第二精密位移台。
5.根据权利要求4所述的实验平台,其特征在于,所述第二精密位移台包括纳米微动台二(6),所述纳米微动台二(6)的底部设置在xy方向位移台二(7)的顶部,所述纳米微动台二(6)的顶部设置有倾斜位移台二(5),所述倾斜位移台二(5)的顶部设置有z方向位移台二(9)。
6.根据权利要求4所述的实验平台,其特征在于,所述倾斜位移台一(4)的顶部设置有激光干涉仪一(3),所述微悬臂梁夹持装置(10)的顶部左端设置有激光干涉仪二(11),所述激光干涉仪一(3)和激光干涉仪二(11)位于同一条竖直水平线上。
7.根据权利要求5所述的实验平台,其特征在于,所述z方向位移台一(8)的顶部设置有倾斜位移台三(12),所述倾斜位移台三(12)的外壁设置有柔性铰链(13)。
8.根据权利要求7所述的实验平台,其特征在于,所述z方向位移台二(9)的底部左端设置有微悬臂梁(14),所述柔性铰链(13)和微悬臂梁(14)之间连接有直流稳压电源(15)。
技术总结
本发明涉及微纳力值测量技术领域,公开了基于非接触参考梁法的微悬臂梁的刚度标定方法,包括以下步骤:a.使用激光干涉仪、待测微悬臂梁、平行四边形柔性铰链、纳米微动台、精密位移台和电压加载装置搭建实验平台;b.控制直流电源加载随时间周期性等间距增大减小的电压;c.通过激光干涉仪实时测量待测微悬臂梁及柔性铰链自由端的位移变化,还公开了实验平台,包括XY方向位移台一、倾斜位移台一、XY方向位移台二和微悬臂梁夹持装置,所述倾斜位移台一的外部设置在XY方向位移台一和XY方向位移台二之间。通过采用的非接触参考梁法,使用静电力作为力的传递媒介,避免了传统的接触式测量可能导致的摩擦误差和测量点损伤。
技术研发人员:张世玉,于枚可,赵聆喆,郭津玮,赵美蓉,郑叶龙
受保护的技术使用者:天津大学
技术研发日:
技术公布日:2024/9/12
- 还没有人留言评论。精彩留言会获得点赞!