本发明涉及机器人,具体地,涉及一种用于机器人的多用途测试平台,尤其是一种用于人形机器人腿足的多用途测试平台,尤其是一种适用于任意腿足结构形态、任意腿足关节自由度配置的人形机器人腿足的多用途测试平台。
背景技术:
1、人形机器人采用仿生学结构,以腿足式行走方式为基础,其独特之处在于该行走方式赋予其跨越地形的能力和灵活多变的运动能力。这使得人形机器人能够在复杂地形,如台阶、沟坎等环境中正常行走,并展现出一定的障碍跨越能力。其模拟人类形态构型的特点使其在家庭陪伴和教育培训方面具备独特的优势。然而,由于人形机器人的构型特点和控制复杂度,目前仍处于样机研发阶段。在这个阶段,样机调试的流程变得至关重要,但现存的问题包括步骤复杂、操作繁琐、成本过高等挑战,迫切需要简化流程和提升效率。为了解决这些挑战,本发明提出了一种专门用于人形机器人腿足的多用途测试平台。该平台不仅能够完成人形机器人的静态固定测试、垂向运动测试、纵向行走运动测试等多项功能,还旨在提高调试的效率。通过简化测试流程和提升操作效率,该平台确保了样机调试的顺利进行,从而最终保证人形机器人的性能和结构的可靠性。
2、公开号为cn106768938a的专利文献公开了一种腿式机器人单腿性能测试实验平台,该平台通过灵活运用钢丝绳和哑铃片,可以对腿部进行高度和负载的调节,为单腿性能测试提供了一定的灵活性和精准性。但是,该专利文献的装置在动态测试方面存在一些限制,无法涵盖行走和垂向运动等关键测试场景,此外,操作复杂性和加载机制薄弱的问题也显而易见,为了进一步提升测试平台的全面性、可用性和可靠性,可能需要考虑改进和优化相应的设计和操作机制。
3、公开号为cn109186977a的专利文献公开了一种用于足式机器人单腿的分层式三自由度试验台,采用高度可调的龙门架固定机器人单腿,并通过分层式加载装置,在三个自由度上对足部进行主动加载与被动载荷测试。但是,该专利文献的测试平台可实现机器人单腿在三个自由度上的加载,但由于单腿上部为固定连接,同样无法适用于诸如跳跃、行走等动态试验条件,且该试验台从足部对单腿进行加载的方式与机器人实际行走时的情况不同,难以反映真实的试验结果。
技术实现思路
1、针对现有技术中的缺陷,本发明的目的是提供一种用于机器人的多用途测试平台。
2、根据本发明提供的一种用于机器人的多用途测试平台,包括:固定装置、驱动装置、力传感器阵列以及测试平台;
3、所述固定装置设置在所述驱动装置上,所述驱动装置驱动所述固定装置运动;所述固定装置用于固定机器人;
4、所述固定装置的运动方向导向所述测试平台设置,所述机器人能够落在所述测试平台上,所述力传感器阵列设置在所述测试平台上。
5、优选的,所述驱动装置包括驱动组件和限位导向组件;
6、所述固定装置滑动设置在所述限位导向组件上,所述驱动组件与所述限位导向组件驱动连接。
7、优选的,所述限位导向组件包括竖直导轨和滑块;
8、所述滑块滑动设置在所述竖直导轨上,所述固定装置与所述滑块连接设置,所述驱动组件与所述滑块连接设置。
9、优选的,所述竖直导轨设置为两个;
10、两个所述竖直导轨对称布置在机器人双腿两侧。
11、优选的,所述竖直导轨为竖直导杆。
12、优选的,所述驱动组件包括吊带和移位机;
13、所述吊带的一端连接所述限位导向组件,所述吊带的另一端连接所述移位机,所述移位机通过所述吊带驱动所述限位导向组件沿竖直方向移动。
14、优选的,所述移位机包括吊机支架、推杆、吊臂以及吊架;
15、所述吊臂的一端转动设置在所述吊机支架上,所述推杆的两端分别连接所述吊机支架和所述吊臂,所述推杆驱动所述吊臂在所述吊架上转动;
16、所述吊架转动设置在所述吊臂的另一端,所述吊架用于连接所述吊带。
17、优选的,所述固定装置包括支撑板和固定单元;
18、所述固定单元设置在所述支撑板上,所述固定单元用于固定机器人;所述支撑板与所述限位导向组件连接设置。
19、优选的,所述测试平台支架底部设置有测试底板,所述力传感器阵列设置在所述测试底板上。
20、优选的,所述测试底板可拆卸设置在测试平台支架上。
21、与现有技术相比,本发明具有如下的有益效果:
22、1、本发明集成了人形机器人零位标定、静态测试和行走测试等多用途测试条件,通过改变滑块上固定螺丝的松紧,吊臂高度,吊带长度和连接点安装等方法调整不同的测试场景,可使得人形机器人便捷地在静态固定、垂向运动、纵向行走运动间切换。
23、2、本发明试验时利用测试平台内建传感器系统可获得机器人双腿受力和位移信息,有效提升试验效率。
24、3、本发明适用于各类腿足式人形机器人结构,通用能力强,易于搭建且操作简单,可根据实际需求灵活调整机器人姿态,在人形机器人开发早期即可进行快速测试和验证,为性能评估提供了便捷而可靠的解决方案。
技术特征:1.一种用于机器人的多用途测试平台,其特征在于,包括:固定装置、驱动装置、力传感器阵列以及测试平台;
2.根据权利要求1所述的用于机器人的多用途测试平台,其特征在于,所述驱动装置包括驱动组件和限位导向组件;
3.根据权利要求2所述的用于机器人的多用途测试平台,其特征在于,所述限位导向组件包括竖直导轨(3)和滑块(4);
4.根据权利要求3所述的用于机器人的多用途测试平台,其特征在于,所述竖直导轨(3)设置为两个;
5.根据权利要求3所述的用于机器人的多用途测试平台,其特征在于,所述竖直导轨(3)为竖直导杆。
6.根据权利要求2所述的用于机器人的多用途测试平台,其特征在于,所述驱动组件包括吊带(5)和移位机;
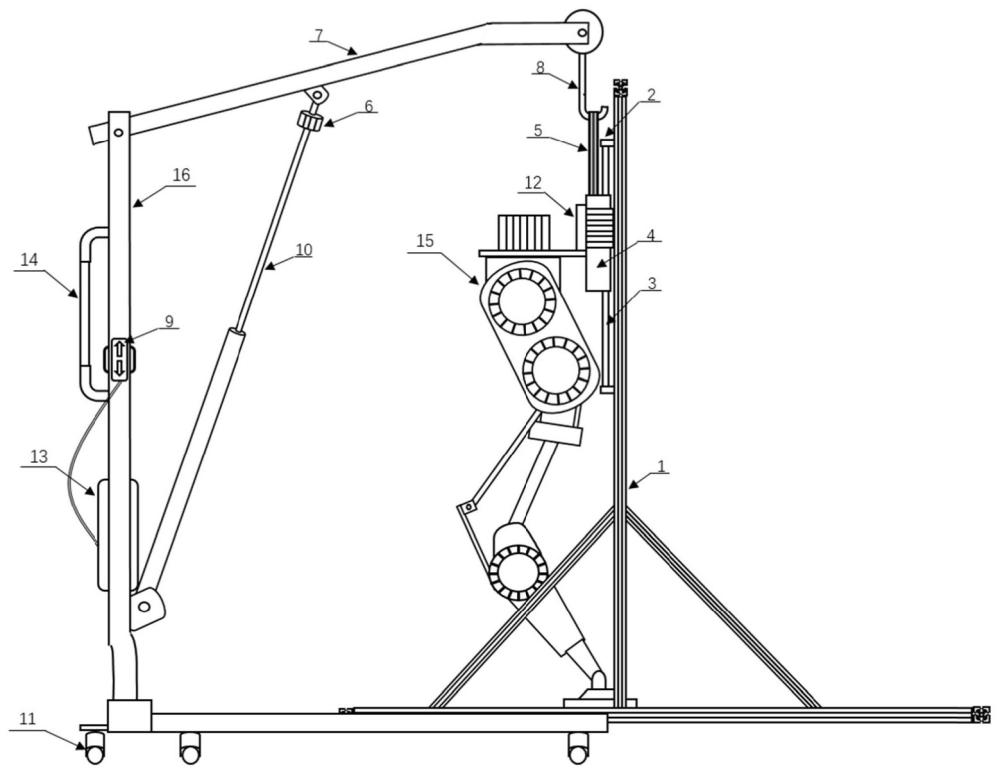
7.根据权利要求6所述的用于机器人的多用途测试平台,其特征在于,所述移位机包括吊机支架(16)、推杆(10)、吊臂(7)以及吊架(8);
8.根据权利要求1所述的用于机器人的多用途测试平台,其特征在于,所述固定装置包括支撑板(12)和固定单元;
9.根据权利要求1所述的用于机器人的多用途测试平台,其特征在于,所述测试平台支架底部设置有测试底板,所述力传感器阵列设置在所述测试底板上。
10.根据权利要求9所述的用于机器人的多用途测试平台,其特征在于,所述测试底板可拆卸设置在测试平台支架上。
技术总结本发明提供了一种用于机器人的多用途测试平台,包括:固定装置、驱动装置、力传感器阵列以及测试平台;所述固定装置设置在所述驱动装置上,所述驱动装置驱动所述固定装置运动;所述固定装置用于固定机器人;所述固定装置的运动方向导向所述测试平台设置,所述机器人能够落在所述测试平台上,所述力传感器阵列设置在所述测试平台上。本发明适用于各类腿足式人形机器人结构,通用能力强,易于搭建且操作简单,可根据实际需求灵活调整机器人姿态,在人形机器人开发早期即可进行快速测试和验证,为性能评估提供了便捷而可靠的解决方案。
技术研发人员:李智军,夏海生,简冰聪,陈启军
受保护的技术使用者:同济大学
技术研发日:技术公布日:2024/8/16