一种基于惯导和UWB的手持单机搜救方法和系统与流程
本申请涉及导航定位,尤其涉及一种基于惯导和uwb的手持单机搜救方法和系统。
背景技术:
1、当前,面对急搜救场景,一般有两种搜救方案:一种为单人手持搜救设备,此类设备一般基于测距,通过人肉眼来观测设备和待搜救对象的距离,不断逼近待搜救目标;另一种需要预建定位系统,通过在安全区域通过预先安装蓝牙,uwb(ultra wide band,超带宽无线载波通信)等基站,对人员定位标签进行定位,在发生安全事故时,通过人员定位系统反馈的标签位置开展搜救行动。
2、但是,上述搜救方案都存在一些问题:
3、对于传统单人手持搜救设备,待搜救人员需要不断的通过和待搜救人员的距离来判定待搜救人员的大致方向,而不能确定较为准确的位置。遇到环境较为复杂的场景,测距不断出现异常跳动时,搜救人员难以准确的排除此类异常,无法判断待搜救人员的大概方向,导致设备功能失效;对于预建定位系统,建设成本较高,遇到险情时,基站的通信链路,如网络,4g,蓝牙网关等可能会遭到破坏,导致系统失效,无法正常的定位。
技术实现思路
1、为了解决现有技术的问题,本申请实施例提供了一种基于惯导和uwb的手持单机搜救方法和系统。所述技术方案如下:
2、第一方面,提供了一种基于惯导和uwb的手持单机搜救方法,包括以下步骤:
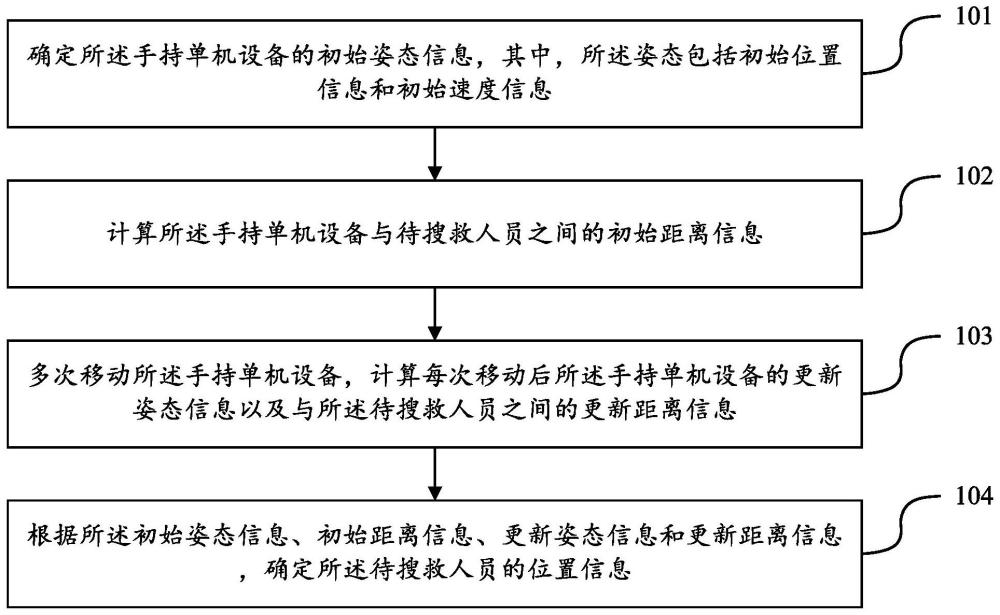
3、确定所述手持单机设备的初始姿态信息,其中,所述姿态包括初始位置信息和初始速度信息;
4、计算所述手持单机设备与待搜救人员之间的初始距离信息;
5、多次移动所述手持单机设备,计算每次移动后所述手持单机设备的更新姿态信息以及与所述待搜救人员之间的更新距离信息;
6、根据所述初始姿态信息、初始距离信息、更新姿态信息和更新距离信息,确定所述待搜救人员的位置信息。
7、可选的,所述多次移动所述手持单机设备,至少为四次。
8、可选的,所述确定所述手持单机设备的初始姿态信息,包括:
9、在静止状态读取所述手持单机设备的加速度传感器数据,确定重力方向,计算得到所述手持单机设备的初始位置信息:
10、
11、
12、其中,θ和φ是以欧拉角形式表示的俯仰角和横滚角,将当前的偏航角ψ定义为0°,此时初始速度为0。
13、可选的,所述计算每次移动后所述手持单机设备的更新姿态信息,包括:
14、通过预积分公式计算每次移动后所述手持单机设备的更新姿态信息,
15、
16、
17、
18、其中,δrij为i时刻到j时刻的旋转矩阵,δvij为i时刻到j时刻的速度矢量,δpij为i时刻到j时刻的位置坐标的变化量。
19、可选的,所述方法还包括:
20、当所述待搜救人员的位置发生变化时,将超过一定时间的状态帧转化为先验概率。
21、可选的,所述方法还包括:
22、对所述手持单机设备校准时,使用当前状态帧中的姿态重力加速度分量和测得的加速度分量做差:
23、
24、第二方面,提供了一种基于惯导和uwb的手持单机搜救系统,所述系统包括手持单机设备和待搜救标签;
25、所述手持单机设备,用于确定所述手持单机设备的初始姿态信息,其中,所述姿态包括初始位置信息和初始速度信息;计算所述手持单机设备与待搜救人员之间的初始距离信息;多次移动所述手持单机设备,计算每次移动后所述手持单机设备的更新姿态信息以及与所述待搜救人员之间的更新距离信息;根据所述初始姿态信息、初始距离信息、更新姿态信息和更新距离信息,确定所述待搜救人员的位置信息。
26、本申请实施例提供的技术方案带来的有益效果是:本申请实施例中,确定所述手持单机设备的初始姿态信息,其中,所述姿态包括初始位置信息和初始速度信息;计算所述手持单机设备与待搜救人员之间的初始距离信息;多次移动所述手持单机设备,计算每次移动后所述手持单机设备的更新姿态信息以及与所述待搜救人员之间的更新距离信息;根据所述初始姿态信息、初始距离信息、更新姿态信息和更新距离信息,确定所述待搜救人员的位置信息。本申请引入惯导系统,仅通过单机搜救设备即可完成对待搜救人员较为准确的定位,不需要搜救人员的主动参与,减少搜救人员的压力和误判。相对于与建立定位系统,单机搜救设备成本极低,基本和传统的单人搜救设备相当。在较为复杂测距不断异常跳动的环境,使用因子图算法能够基于历史测距排除异常测距对定位结果的干扰。在复杂环境中也能得到较好的定位效果。
技术特征:
1.基于惯导和uwb的手持单机搜救方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的方法,其特征在于,所述多次移动所述手持单机设备,至少为四次。
3.根据权利要求1所述的方法,其特征在于,所述确定所述手持单机设备的初始姿态信息,包括:
4.根据权利要求1所述的方法,其特征在于,所述计算每次移动后所述手持单机设备的更新姿态信息,包括:
5.根据权利要求1所述的方法,其特征在于,所述方法还包括:
6.根据权利要求1所述的方法,其特征在于,所述方法还包括:
7.基于惯导和uwb的手持单机搜救系统,其特征在于,所述系统包括手持单机设备和待搜救标签;
技术总结
本申请公开了一种基于惯导和UWB的手持单机搜救方法和系统。所述方法包括:确定所述手持单机设备的初始姿态信息,其中,所述姿态包括初始位置信息和初始速度信息;计算所述手持单机设备与待搜救人员之间的初始距离信息;多次移动所述手持单机设备,计算每次移动后所述手持单机设备的更新姿态信息以及与所述待搜救人员之间的更新距离信息;根据所述初始姿态信息、初始距离信息、更新姿态信息和更新距离信息,确定所述待搜救人员的位置信息。本申请引入惯导系统,仅通过单机搜救设备即可完成对待搜救人员较为准确的定位,不需要搜救人员的主动参与,减少搜救人员的压力和误判。在较为复杂测距不断异常跳动的环境,使用因子图算法能够基于历史测距排除异常测距对定位结果的干扰。在复杂环境中也能得到较好的定位效果。
技术研发人员:肖志昂,杨纪刚
受保护的技术使用者:深圳锦沃科技有限公司
技术研发日:
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!