一种码头撞击监测方法及系统与流程
本发明属于码头撞击监测,尤其涉及一种码头撞击监测方法及系统。
背景技术:
1、近年来,船舶撞击码头的事件时有发生,造成船撞码头的原因无外乎客观因素和主观因素两种,客观因素包括设备故障或失灵、风浪、水域能见度等,主观因素则包括船员疏忽大意、操作失误或者违反航行规则,船撞码头轻则影响码头正常装卸作业,重则影响码头运行的安全性及码头结构耐久性,因此有必然对船舶撞击码头进行实时监测,以复现船舶撞击码头的撞击过程,为定损、处理撞损事故等提供一定数据支持。
2、现有技术中,有学者通过建立撞击模型或撞击防护模型并进行动力学分析和简化从而进行码头撞击监测;有学者通过对国际桥梁和结构工程协会、美国公路桥梁船舶撞击设计规范等现有的规范公式进行参数修正等改进从而获得船撞码头的撞击力,还有的采用lagrange算法、euler算法等方式结合不同码头种类进行船撞码头的碰撞动力分析。然而上述现有技术中对于码头撞击的实时监测,大多需要依赖压力或振动传感器、风速仪、水流计等仪器进行长时间、高频率、不间断的多指标监测,消耗资源的同时,还可能因为传感器、风速仪、水流计长时间工作而造成监测结果偏差较大,经过部分模型或算法的放大作用从而扩大了测量偏差,从而导致码头撞击监测结果不及时不准确的问题;因而有必要提出设计一种能够对码头撞击进行精准监测又能够降低资源损耗、提高监测准确度的码头撞击监测方法。
技术实现思路
1、本发明的目的在于提供一种码头撞击监测方法及系统,基于船舶偏航概率和船舶失控概率计算船舶撞击码头的撞击概率,并且在计算得到的撞击概率大于第一阈值时使雷达波监测模块控制码头撞击监测模块进行码头撞击数据监测,进而进行船舶撞击码头时的撞击力计算。本发明的码头撞击监测方法不需要传感器、风速仪、水流计等监测器件长时间、高频率、不间断的进行监测,节省资源的同时避免了因监测器件长时间运行而导致的监测准确度下降的问题。
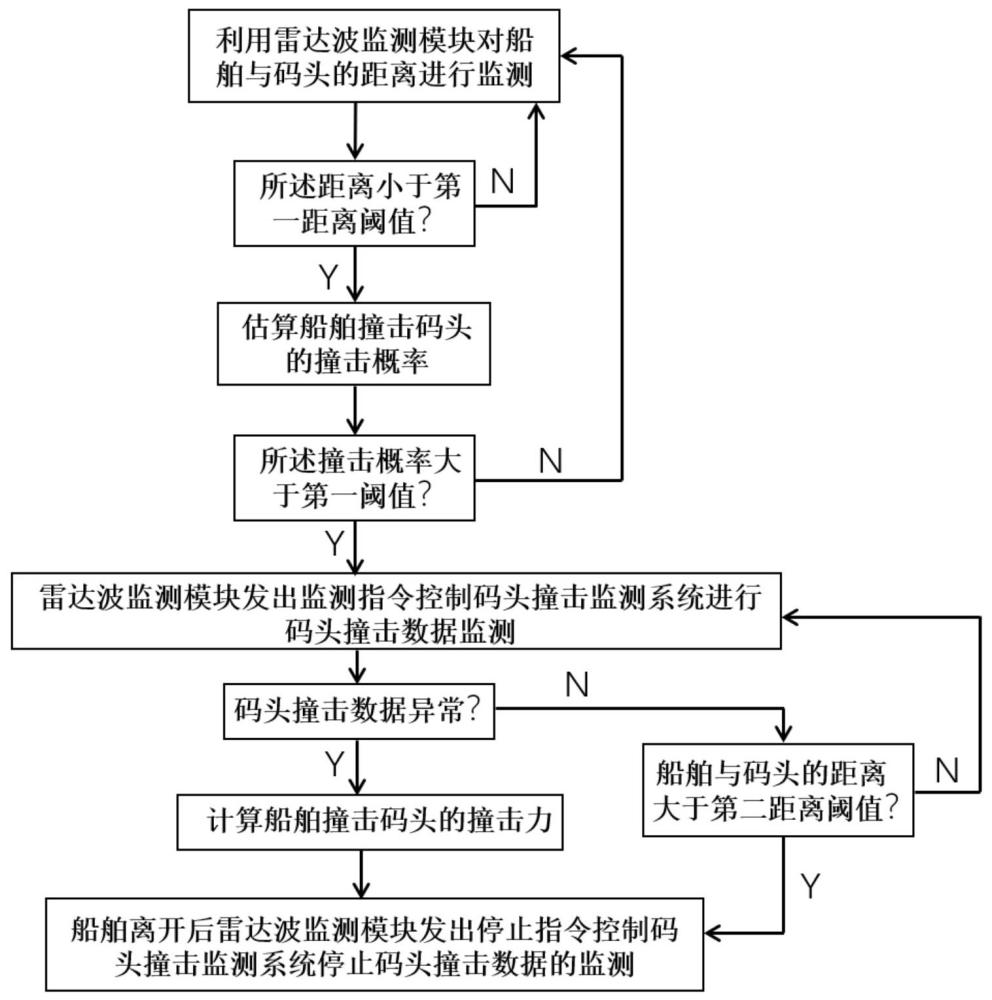
2、为了实现上述目的,本发明采用了如下技术方案:一种码头撞击监测方法,所述方法包括:步骤s1:估算船舶撞击码头的撞击概率;步骤s2:当所述撞击概率大于第一阈值时,雷达波监测模块发出监测指令控制码头撞击监测系统进行码头撞击数据监测;步骤s3:当所述码头撞击数据异常时,计算船舶撞击码头时的撞击力;步骤s4:船舶离开后,雷达波监测模块发出停止指令控制码头撞击监测系统停止码头撞击数据的监测。
3、进一步地,在所述步骤s1之前,所述监测方法还包括,利用所述雷达波监测模块对船舶与码头的距离进行监测,当所述距离小于第一距离阈值时,对所述撞击概率进行估算。
4、进一步地,所述步骤s1中估算船舶撞击码头的撞击概率,具体为:
5、
6、其中pimpact表示船舶撞击码头的撞击概率,pdev表示船舶偏航概率,plossctl表示船舶失控概率,p11表示前一年码头所处河道的平均偏航概率,p12表征水流对于船舶行驶的影响,p13表示码头所处航道的位置,p14表示码头所处航道的拥挤程度,(l+w)表示船舶长宽和,wt表示船舶载荷,(l+w)ref表示船舶长宽和基准值,wtref表示船舶载荷基准值,β1和β2分别表示第一和第二权重系数。
7、进一步地,所述p12根据如下公式确定:p12=(1+k12×vc);其中k12表示附加水流调节系数,vc表示当前时刻的水流速度。
8、进一步地,所述p13根据如下公式确定:p13=(1+θ/45°);其中θ表示码头所处位置与航道航线夹角。
9、进一步地,所述p14根据如下公式确定:p14=n/s;其中s表示码头所处河道的第一面积,n表示当前时刻的船只数量。
10、进一步地,所述第一面积为码头长度与码头垂直方向上的河道宽度的乘积的2倍。
11、进一步地,所述步骤s3中,计算船舶撞击码头时的撞击力,具体为:
12、
13、其中,fimpact表示所述撞击力,μ表示撞击力系数,vimpact表示撞击速度,wt表示船舶载荷。
14、此外,本发明还提供一种码头撞击监测系统,用于执行上述码头撞击监测方法,所述码头撞击监测系统包括雷达波监测模块和码头撞击监测模块,所述雷达波监测模块与码头撞击监测模块相连,所述码头撞击监测模块包括振动监测传感器、旋翼式水流速仪、摄像头,所述雷达波监测模块用于控制码头撞击监测模块进行码头撞击数据监测,所述旋翼式水流速仪用于测量码头所处河道的水流流速,所述摄像头用于捕获可视范围内的船只数量并计算码头所处河道的第一面积,所述振动监测传感器用于监测码头的振动数据,当所述振动数据异常时表示码头撞击数据异常。
15、本发明与现有技术相比的有益技术效果在于,基于船舶偏航概率和船舶失控概率计算船舶撞击码头的撞击概率,并且在计算得到的撞击概率大于第一阈值时,再使雷达波监测模块控制码头撞击监测模块进行码头撞击数据监测,本发明的码头撞击监测方法不需要传感器、风速仪、水流计等监测器件长时间、高频率、不间断的进行监测,节省资源的同时避免了因监测器件长时间运行而导致的监测准确度下降的问题。
技术特征:
1.一种码头撞击监测方法,其特征在于,所述方法包括:
2.如权利要求1所述的码头撞击监测方法,其特征在于,在所述s1之前,所述监测方法还包括,利用所述雷达波监测模块对船舶与码头的距离进行监测,当所述距离小于第一距离阈值时,对所述撞击概率进行估算。
3.如权利要求1所述的码头撞击监测方法,其特征在于,所述s1中估算船舶撞击码头的撞击概率,具体为:
4.如权利要求3所述的码头撞击监测方法,其特征在于,所述p12根据如下公式确定:
5.如权利要求3所述的码头撞击监测方法,其特征在于,所述p13根据如下公式确定:
6.如权利要求3所述的码头撞击监测方法,其特征在于,所述p14根据如下公式确定:
7.如权利要求6所述的码头撞击监测方法,其特征在于,所述第一面积为码头长度与码头垂直方向上的河道宽度的乘积的2倍。
8.如权利要求1所述的码头撞击监测方法,其特征在于,所述s3中,计算船舶撞击码头时的撞击力,具体为:
9.一种码头撞击监测系统,用于执行权利要求1-8任一项所述的码头撞击监测方法,其特征在于,所述码头撞击监测系统包括雷达波监测模块和码头撞击监测模块,所述雷达波监测模块与码头撞击监测模块相连,所述码头撞击监测模块包括振动监测传感器、旋翼式水流速仪、摄像头,所述雷达波监测模块用于控制码头撞击监测模块进行码头撞击数据监测,所述旋翼式水流速仪用于测量码头所处河道的水流流速,所述摄像头用于捕获可视范围内的船只数量并计算码头所处河道的第一面积,所述振动监测传感器用于监测码头的振动数据,当所述振动数据异常时表示码头撞击数据异常。
10.如权利要求9所述的码头撞击监测系统,其特征在于,所述摄像头的视场角大于150度。
技术总结
本发明提出一种码头撞击监测方法及系统,属于码头撞击监测技术领域。估算船舶偏航概率和船舶失控概率,然后基于船舶偏航概率和船舶失控概率计算船舶撞击码头的撞击概率,并且在计算得到的上述撞击概率大于第一阈值时,使雷达波监测模块控制码头撞击监测模块进行码头撞击数据监测,进而进行船舶撞击码头时的撞击力计算。本发明的码头撞击监测方法不需要传感器、风速仪、水流计等监测器件长时间、高频率、不间断的进行监测,节省资源的同时避免了因监测器件长时间运行而导致的监测准确度下降的问题。
技术研发人员:乔小利,韩冉冉,李明玉,王路遥,张勇
受保护的技术使用者:交通运输部天津水运工程科学研究所
技术研发日:
技术公布日:2024/6/20
- 还没有人留言评论。精彩留言会获得点赞!