一种基于扩展型脉冲神经膜系统的移动机器人路径规划方法
本发明属于机器人路径规划,涉及一种基于扩展型脉冲神经膜系统的移动机器人路径规划方法。
背景技术:
1、移动机器人是一种集环境感知、动态决策与规划、行为控制与执行等多功能于一体的智能化机器。随着现代高科技产业的快速发展,移动机器人在工业、农业、医学、生活服务、军事等领域不断被开发和完善。在移动机器人的核心研究中,路径规划被视为至关重要的一环,它是实现机器人自主导航的必要条件。路径规划实质上是一个优化问题,其优化目标通常涉及路径长度、时间、能耗、路径平滑度等方面,或者是多个约束条件的加权组合。通过路径规划,移动机器人可以在复杂、未知的环境中规划出最优或接近最优的路径,从而实现高效、安全的导航和执行任务。这不仅提高了移动机器人的自主性和适应性,也增强了其在各个应用领域中的应用价值和竞争力。
2、膜计算是自然计算的新分支,旨在从生命细胞的结构与功能中以及从组织和器官等细胞群的协作中抽象出计算模型。一般可分为由树状图表达的细胞膜系统、由无向图表达的组织膜系统和由有向图表达的脉冲神经膜系统。脉冲神经膜系统被提出以来,其直观、易于理解的图形表达形式和强大的计算能力受到了数学、计算机、生物等众多领域研究人员的青睐。
3、传统的麻雀搜索算法(sparrow search algorithm,ssa)具有较好的鲁棒性、较快的收敛速度和较少的调优参数。然而,麻雀搜索算法与其他智能优化算法一样,也存在初始种群质量不高、容易陷入局部最优解、解精度较低等缺点。麻雀搜索算法的初始化策略是一种简单的随机方法,这使得算法的性能很大程度上取决于初始化群体的多样性。此外,在算法的后期迭代中,麻雀群体逐渐聚集在找到的最优位置周围,使其很容易陷入局部最优解。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供一种基于扩展型脉冲神经膜系统的移动机器人路径规划方法,旨在解决目前算法存在的初始种群质量不高、收敛速度慢和容易陷入局部最优解的问题。
2、为了实现上述目的,本发明使用扩展型脉冲神经膜系统(esnps),神经元的输出表示麻雀相应位置的更新状态。具体采用的技术方案和步骤如下:
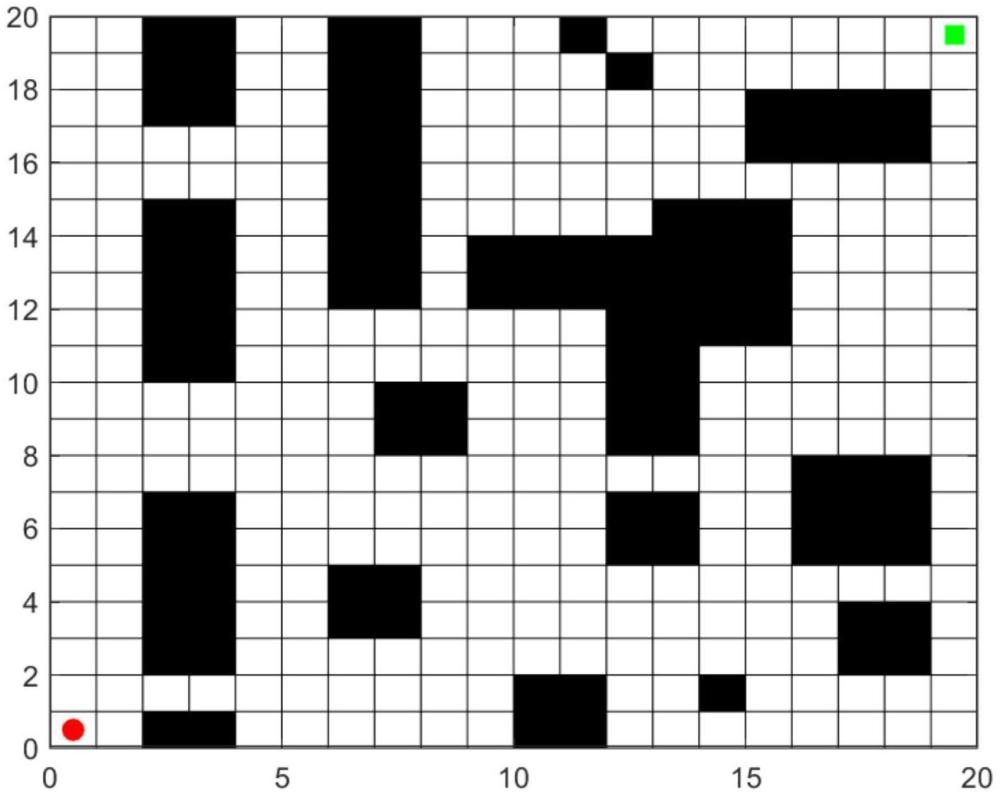
3、步骤1、基于栅格法建立机器人二维环境地图模型,标记出障碍物区域、起点、终点等重要信息。
4、步骤2、初始化麻雀种群和esnps,包括esnps中神经元状态规则、种群大小m、最大迭代次数tmax、安全值st、发现者数量及预警者比例等。
5、步骤3、根据机器人最短路径、安全度、路径平滑度确定适应度函数。对步骤2中得到的初始化种群个体计算适应度值,选取前pd只麻雀为发现者,其余均为加入者。
6、适应度函数如公式(1)所示:
7、f(x,y)=αf1(x,y)+γf2(x,y)+f3(x,y) (1)
8、式中,x和y为一条路径上的点,α、γ为权重系数,f1(x,y)为路径长度,f2(x,y)为路径平滑度评价函数,f3(x,y)为安全度函数。
9、步骤4、对适应度值进行升序排列,记录最优者、最差者的适应度值和位置。
10、步骤5、esnps优化麻雀搜索算法,根据esnps上一次迭代生成的脉冲序列来更新相应麻雀种群的位置状态,同时在发现者位置更新处引入自适应惯性因子。
11、步骤6、对路径进行高斯变异策略和三次b样条曲线平滑处理,直至迭代结束输出最优路径。
12、总体而言,与现有技术相比,本发明具有以下有益效果:
13、(1)采用circle混沌映射进行种群初始化,生成分布更加均匀的麻雀种群,增加了种群多样性,提高了初始麻雀种群解的质量。
14、(2)esnps具有高效性和并行性,在麻雀种群位置更新处引入esnps,提高了系统整体运行速度。
15、(3)在发现者位置更新处引入自适应惯性因子,使得在算法不同迭代阶段自适应调整惯性因子,从而良好的平衡了全局搜索和局部搜索,降低了陷入局部最优解的风险,提高了优化算法的效率和鲁棒性。
16、(4)在麻雀搜索算法的后期迭代中,采用高斯变异策略选择具有当前最佳适应度值的个体进行突变,比较其突变前后的位置,选择更好的位置进入下一次迭代,减小了种群多样性的缺乏和算法过早收敛的趋势。
17、(5)为了使路径规划结果更加平滑和符合实际需求,将改进的麻雀搜索算法(issa)与三次b样条曲线结合对路径进行平滑处理。
技术特征:
1.一种基于扩展型脉冲神经膜系统的移动机器人路径规划方法,其特征在于,所述路径规划方法、步骤包括:
2.根据权利要求1所述的一种基于扩展型脉冲神经膜系统的移动机器人路径规划方法,其特征在于步骤1采用栅格法,0表示可以自由移动的区域,1表示的是存在障碍物的区域,0和1分别对应着白色和黑色区域。
3.根据权利要求1所述的一种基于扩展型脉冲神经膜系统的移动机器人路径规划方法,其特征在于步骤2采用circle混沌映射初始化种群,公式为:
4.根据权利要求1所述的一种基于扩展型脉冲神经膜系统的移动机器人路径规划方法,其特征在于步骤3适应度函数公式为:
5.根据权利要求1所述的一种基于扩展型脉冲神经膜系统的移动机器人路径规划方法,其特征在于步骤5根据上一次迭代生成的脉冲序列来更新相应麻雀种群的位置状态,同时采用自适应惯性因子改进发现者位置,发现者的位置更新公式为:
6.根据权利要求1所述的一种基于扩展型脉冲神经膜系统的移动机器人路径规划方法,其特征在于步骤6引入高斯变异策略和三次b样条曲线,高斯变异公式为:
技术总结
本发明属于机器人路径规划技术领域,涉及一种基于扩展型脉冲神经膜系统的移动机器人路径规划方法;其步骤包括:使用栅格法建立机器人二维环境地图;Circle混沌初始化麻雀种群和扩展型脉冲神经膜系统;建立机器人路径规划适应度函数;结合扩展型脉冲神经膜系统、采用自适应惯性因子、高斯变异策略来改进麻雀搜索算法,采用三次B样条曲线对路径进行平滑处理,得到全局最优解;相对于传统的麻雀搜索算法,改进后的算法更具有高效并行性、收敛速度快和良好的跳出局部最优能力。
技术研发人员:许家昌,王婷婷,吴浩楠,张婷婷,叶栩秀,倪龙
受保护的技术使用者:安徽理工大学
技术研发日:
技术公布日:2024/9/9
- 还没有人留言评论。精彩留言会获得点赞!