零点校正方法、装置、设备及存储介质与流程
本申请涉及数据处理,尤其涉及零点校正方法、装置、设备及存储介质。
背景技术:
1、随着汽车产业的快速发展,行车记录仪作为汽车电子设备的重要组成部分,在行车安全领域发挥着越来越重要的作用。其中,g-sensor(gravitysensor重力传感器)作为行车记录仪的关键部件之一,承担着碰撞检测的重要任务。然而,在实际应用中,由于安装位置的不确定性以及环境噪声的干扰,g-sensor的零点位置往往会发生偏移,导致碰撞检测结果的准确性下降。
2、传统的零点校正方法主要依赖于固定参数或预设阈值进行校正,这种方法虽然简单易行,但在面对复杂多变的应用环境时,其校正效果往往不尽如人意。一方面,由于安装位置的变化,零点位置也会发生相应的变化,而固定参数的方法无法适应这种变化;另一方面,环境噪声的干扰也会对零点位置的检测造成影响,导致校正结果不准确。
3、综上,如何实现自适应零点位置变化并有效抑制噪声干扰的零点校正,以提高行车记录仪的碰撞检测准确性和稳定性,俨然已成为本领域亟需解决的技术问题。
技术实现思路
1、本申请的主要目的在于提供一种零点校正方法、装置、设备及存储介质,旨在实现自适应零点位置变化并有效抑制噪声干扰的零点校正,以提高行车记录仪的碰撞检测准确性和稳定性。
2、为实现上述目的,本申请提出一种零点校正方法,零点校正方法包括:
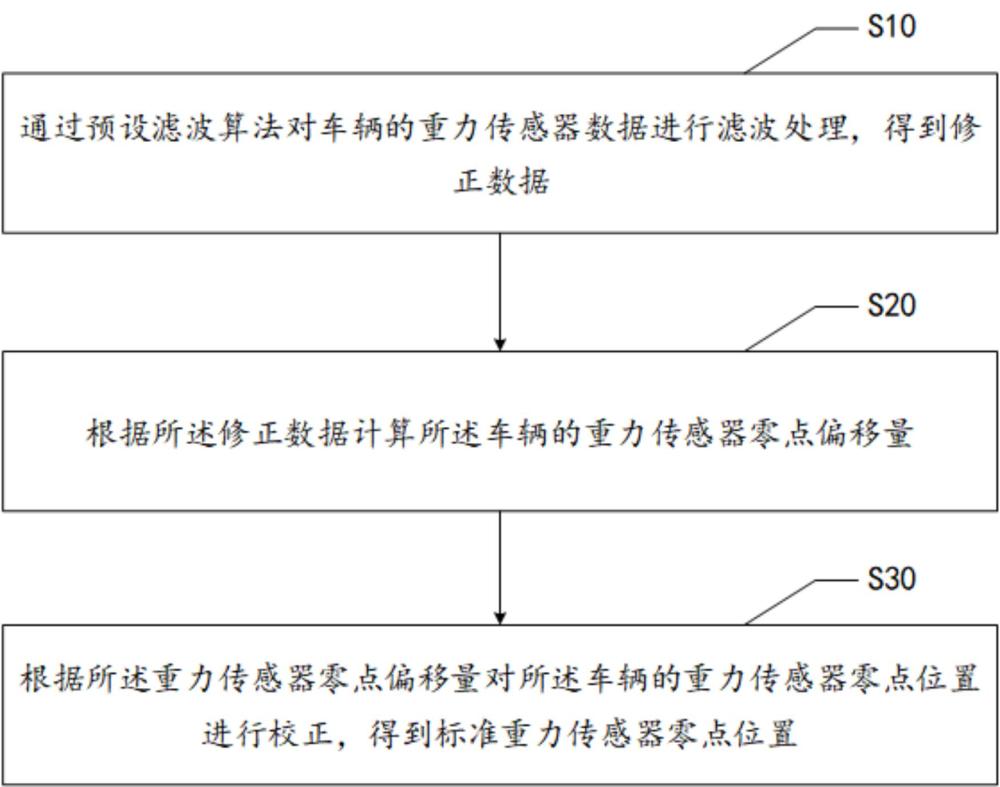
3、通过预设滤波算法对车辆的重力传感器数据进行滤波处理,得到修正数据;
4、根据修正数据计算车辆的重力传感器零点偏移量;
5、根据重力传感器零点偏移量对车辆的重力传感器零点位置进行校正,得到标准重力传感器零点位置。
6、在一实施例中,在预设滤波算法为卡尔曼滤波算法时,通过预设滤波算法对车辆的重力传感器数据进行滤波处理,得到修正数据的步骤包括:
7、基于车辆的重力传感器数据确定状态向量和观测向量;
8、根据当前时刻的观测向量和前一时刻的状态向量获得下一时刻的预测状态向量和预测误差协方差矩阵;
9、基于预测误差协方差矩阵、观测矩阵和观测噪声协方差确定卡尔曼增益;
10、基于卡尔曼增益和新的观测向量分别对预测状态向量和预测误差协方差矩阵进行更新,获得校正数据,校正数据为修正数据。
11、在一实施例中,方法还包括:
12、获取环境参数;
13、根据环境参数调整卡尔曼滤波算法中的滤波参数,以使卡尔曼滤波算法自适应环境变化。
14、在一实施例中,根据修正数据计算车辆的重力传感器零点偏移量的步骤包括:
15、根据修正数据计算车辆的当前重力传感器零点位置;
16、将当前重力传感器零点位置和标准重力传感器零点位置进行差值计算,得到车辆的重力传感器零点偏移量。
17、在一实施例中,根据修正数据计算车辆的当前重力传感器零点位置的步骤包括:
18、在车辆为行驶状态时,将修正数据和车辆的gps数据和路况数据进行复合运算分析,得到车辆的行驶数据,行驶数据包括移动距离、速度和加速度;
19、采用多源数据融合算法,根据行驶数据和修正数据计算车辆的当前重力传感器零点位置。
20、在一实施例中,方法还包括:
21、建立车辆行驶模型,车辆行驶模型包括车辆状态评估算法;
22、根据车辆状态评估算法和车辆的行驶参数确定车辆的第一行驶状态;
23、将第一行驶状态和根据重力传感器数据确定的第二行驶状态进行比较;
24、若第一行驶状态和第二行驶状态不同,则执行通过预设滤波算法对车辆的重力传感器数据进行滤波处理,得到修正数据的步骤。
25、在一实施例中,根据重力传感器零点偏移量对车辆的重力传感器零点位置进行校正,得到标准重力传感器零点位置的步骤包括:
26、将重力传感器零点偏移量与预设偏移阈值进行比较,得到比较结果;
27、若比较结果为重力传感器零点偏移量大于预设偏移阈值,则对车辆的重力传感器零点位置进行校正,得到标准重力传感器零点位置,标准重力传感器零点位置的零点偏移量为零。
28、此外,为实现上述目的,本申请还提出一种零点校正装置,零点校正装置包括:
29、滤波模块,用于通过预设滤波算法对车辆的重力传感器数据进行滤波处理,得到修正数据;
30、偏移量计算模块,用于根据修正数据计算车辆的重力传感器零点偏移量;
31、零点校正模块,用于根据重力传感器零点偏移量对车辆的重力传感器零点位置进行校正,得到标准重力传感器零点位置。
32、此外,为实现上述目的,本申请还提出一种电子设备,设备包括:存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,计算机程序配置为实现如上文的零点校正方法的步骤。
33、此外,为实现上述目的,本申请还提出一种存储介质,存储介质为计算机可读存储介质,存储介质上存储有计算机程序,计算机程序被处理器执行时实现如上文的零点校正方法的步骤。
34、本申请提出了一种零点校正方法,本申请首先通过预设滤波算法对车辆的重力传感器采集的原始数据进行滤波处理,以消除数据中的噪声和异常值,从而得到修正后的重力传感器数据,即修正数据;然后,基于修正数据计算重力传感器的零点偏移量,零点偏移量表示实际零点与理想零点之间的差值;最后,根据计算出的零点偏移量,对重力传感器的零点位置进行校正,确保重力传感器的零点位置准确无误,进而得到标准重力传感器零点位置。
35、综上可知,本申请通过采用预设滤波算法对重力传感器数据进行处理,能够有效地去除重力传感器数据中的噪声信号,保留真实有效的数据,从而提高了零点位置检测的准确性,同时,由于零点偏移量是基于实时数据计算得出的,因此能够自适应地应对重力传感器安装位置的变化,确保在任何情况下都能得到准确的零点位置,不仅解决了传统零点校正方法无法适应复杂多变环境的问题,还提高了零点位置检测的准确性和稳定性,进而提升了行车记录仪的碰撞检测性能。
技术特征:
1.一种零点校正方法,其特征在于,所述的方法包括:
2.如权利要求1所述的方法,其特征在于,在所述预设滤波算法为卡尔曼滤波算法时,所述通过预设滤波算法对车辆的重力传感器数据进行滤波处理,得到修正数据的步骤包括:
3.如权利要求2所述的方法,其特征在于,所述方法还包括:
4.如权利要求1所述的方法,其特征在于,所述根据所述修正数据计算所述车辆的重力传感器零点偏移量的步骤包括:
5.如权利要求4所述的方法,其特征在于,所述根据所述修正数据计算所述车辆的当前重力传感器零点位置的步骤包括:
6.如权利要求1所述的方法,其特征在于,所述方法还包括:
7.如权利要求1所述的方法,其特征在于,所述根据所述重力传感器零点偏移量对所述车辆的重力传感器零点位置进行校正,得到标准重力传感器零点位置的步骤包括:
8.一种零点校正装置,其特征在于,所述装置包括:
9.一种电子设备,其特征在于,所述设备包括:存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述计算机程序配置为实现如权利要求1至7中任一项所述的方法的步骤。
10.一种存储介质,其特征在于,所述存储介质为计算机可读存储介质,所述存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述的方法的步骤。
技术总结
本申请公开了一种零点校正方法、装置、设备及存储介质,涉及数据处理技术领域,公开的零点校正方法包括:通过预设滤波算法对车辆的重力传感器数据进行滤波处理,得到修正数据;根据修正数据计算车辆的重力传感器零点偏移量;根据重力传感器零点偏移量对车辆的重力传感器零点位置进行校正,得到标准重力传感器零点位置。本申请能够提高零点位置检测的准确性和稳定性,进而提升行车记录仪的碰撞检测性能。
技术研发人员:洪杰,左奇
受保护的技术使用者:深圳市小镜科技有限公司
技术研发日:
技术公布日:2024/6/26
- 还没有人留言评论。精彩留言会获得点赞!