一种无人机避障距离测量方法和设备
本发明涉及一种无人机避障距离测量方法和设备,尤其是涉及一种无人机避障距离测量方法和设备。
背景技术:
1、无人机的避障能力是其自主飞行安全的重要保证。目前对于无人机避障能力的并没有统一的评判标准,常用的评价指标有碰撞率、安全性、避障路径长度等。而对于受限应用空间,要求无人机能够实现近距离避开障碍物,因此避障距离也成为了评估系统性能的重要指标之一。避障距离作为避障性能的指标在无人机及其他自主移动系统领域中起着关键作用。它衡量了系统在检测到障碍物后采取行动以避免碰撞的能力,并反映了系统在真实世界中执行避障任务时的效能和安全性。因此,工程师和研究人员通常致力于改进系统的传感器、障碍物检测算法和避障决策策略,以增加系统的避障距离,从而提高系统的整体性能和可靠性。
2、避障距离的测量可以通过仿真模拟、实地测试等方法来实现。在仿真模拟中,可以设置各种场景,并模拟系统的行为以评估其避障距离,但仿真环境通常并不能完全模拟现实场景,因此数据结果不能反映真实场景情况。在实地测试中,目前可通过在无人机机体上加装各类传感器进行距离测定,通过传感器测距数据分析,估计避障距离,但此类方法成本高,设计复杂,应用起来不够便捷高效。
3、综上,当前缺少一种避障距离测量方法,以解决或部分解决前述问题。
技术实现思路
1、本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种无人机避障距离测量方法和设备,以实现在真实避障场景下避障距离的快速准确测量。
2、本发明的目的可以通过以下技术方案来实现:
3、本发明的一个方面,提供了一种无人机避障距离测量方法,包括如下步骤:
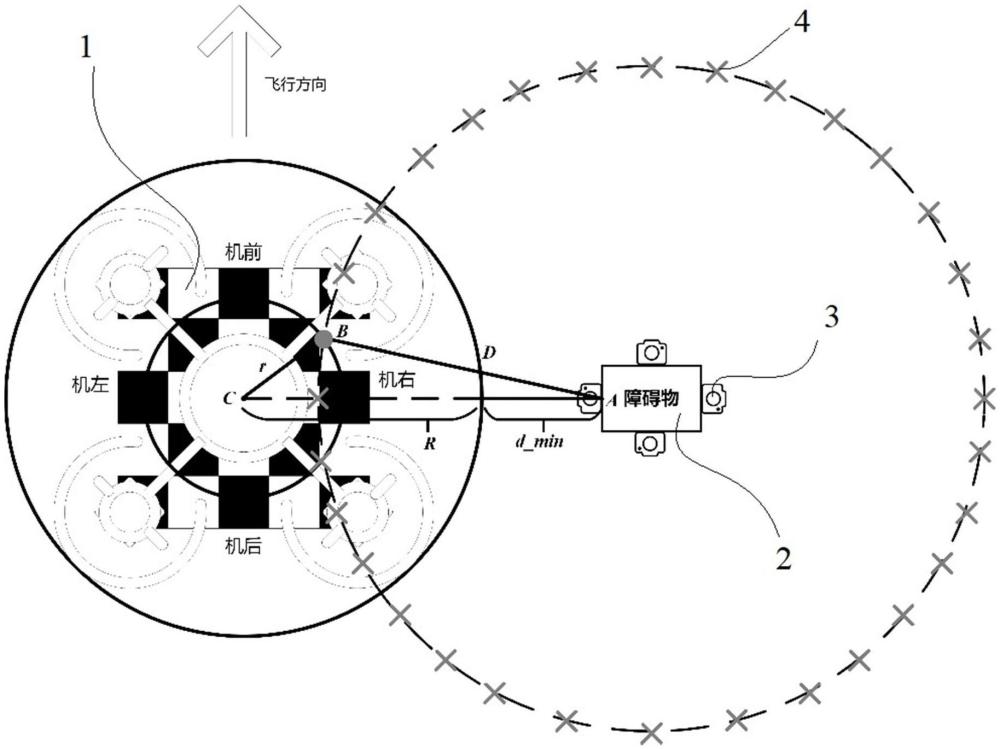
4、获取垂直于参考平面设置的激光器b发出的激光照射在标定板上的位置信息,其中,所述激光器b位于以障碍物a为圆心,半径d的周长上,所述标定板设置在待测无人机底部且平行于所述参考平面;
5、基于所述位置信息,计算在所述参考平面上∠cba的角度信息以及bc的长度,其中,c为所述待测无人机的中心;
6、基于所述∠cba的角度信息、bc的长度、半径d以及预先获取的所述待测无人机的碰撞范围半径r,计算所述待测无人机当前位置的避障距离。
7、作为优选的技术方案,所述的∠cba的角度信息包括∠cba的正弦值、余弦值、正切值、角度值中的一个或多个。
8、作为优选的技术方案,所述的∠cba的角度信息的计算过程包括如下步骤:
9、在所述参考平面计算交点与激光器b的距离x,其中,所述交点为过c点的直线ab的垂线与直线ab的交点;
10、基于所述距离x和所述bc的长度,得到所述的∠cba的角度信息。
11、作为优选的技术方案,基于所述距离x和所述bc的长度,得到所述的∠cba的角度信息采用下式实现:
12、
13、其中,x为所述参考平面上交点与激光器b的距离,r为bc的长度,当β>π时cosβ取负值,否则cosβ取正值。
14、作为优选的技术方案,基于设置在所述障碍物处获取的图像,得到所述的位置信息以及所述交点与激光器b的距离x。
15、作为优选的技术方案,所述的待测无人机的避障距离dmin采用下式计算:
16、
17、其中,r为bc的长度,cosβ为∠cba的余弦函数值,即所述∠cba的角度信息。
18、本发明的另一个方面,提供了一种无人机避障距离测量方法,所述的bc的长度通过标定板读取或标尺测量得到。
19、作为优选的技术方案,用于实现前述的无人机避障距离测量方法,所述设备包括:
20、激光器阵列,间隔设置在以障碍物为圆心的圆周上;
21、标定板,与待测无人机底部连接;
22、图像传感器,设置在所述障碍物处。
23、作为优选的技术方案,所述的激光器阵列中,各个激光器均匀分布在圆周上。
24、作为优选的技术方案,所述待测无人机的中心与所述标定板的中心的连线与参考平面垂直。
25、与现有技术相比,本发明至少具有以下有益效果之一:
26、(1)实现真实避障场景下避障距离的准确测量:在本方案中,无需考虑机载传感器的硬件安装,可以在无人机无需加装传感器的前提下,仅在障碍物周围配置激光发射器并在无人机底部配置标定板即可完成测量,通过三角几何原理,实现避障距离的准确计算。
27、(2)测量方便快捷:本方案硬件上的激光器阵列、标定板和图像传感器能够方便的进行拆装,能够方便地应用在无人机自动巡航过程中。
28、(3)成本低廉结果直观:无需高昂的测距模块,直观、简易地实现避障过程中最小避障距离的测量,进而评估避障性能。
技术特征:
1.一种无人机避障距离测量方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种无人机避障距离测量方法,其特征在于,所述的∠cba的角度信息包括∠cba的正弦值、余弦值、正切值、角度值中的一个或多个。
3.根据权利要求1所述的一种无人机避障距离测量方法,其特征在于,所述的∠cba的角度信息的计算过程包括如下步骤:
4.根据权利要求3所述的一种无人机避障距离测量方法,其特征在于,基于所述距离x和所述bc的长度,得到所述的∠cba的角度信息采用下式实现:
5.根据权利要求3所述的一种无人机避障距离测量方法,其特征在于,基于设置在所述障碍物处获取的图像,得到所述的位置信息以及所述交点与激光器b的距离x。
6.根据权利要求1所述的一种无人机避障距离测量方法,其特征在于,所述的待测无人机的避障距离dmin采用下式计算:
7.根据权利要求1所述的一种无人机避障距离测量方法,其特征在于,所述的bc的长度通过标定板读取或标尺测量得到。
8.一种无人机避障距离测量设备,其特征在于,用于实现如权利要求1-7任一所述的无人机避障距离测量方法,所述设备包括:
9.根据权利要求8所述的一种无人机避障距离测量设备,其特征在于,所述的激光器阵列中,各个激光器均匀分布在圆周上。
10.根据权利要求8所述的一种无人机避障距离测量设备,其特征在于,所述待测无人机的中心与所述标定板的中心的连线与参考平面垂直。
技术总结
本发明涉及一种无人机避障距离测量方法和设备,方法包括:在无人机的飞行航线上的障碍物周围,在地面上以障碍物为圆心,以D为半径,均匀并垂直摆放激光笔,并在障碍物周围放置好拍摄设备;将标定板平行于无人机底部安装在无人机起落架上;场景布置完成后,启动无人机自主飞行程序,无人机巡航避障;通过读取巡航飞行过程中拍摄设备的视频数据,确定包含激光光点B的图像片段。并通过标定板,读取以无人机为圆心的光点位置半径r;依据图像信息,计算得到β;根据D、β、r,代入三角几何公式,得到最小避障距离d<subgt;min</subgt;。与现有技术相比,本发明实现真实避障场景下避障距离的准确测量,具有测量准确,简单快捷等优点。
技术研发人员:岑峰,亓颖颖,吕壹凡,杨兴杰
受保护的技术使用者:同济大学
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!