基于融合特征的多目标雷达回波关联方法和系统
本发明属于雷达目标跟踪,涉及一种基于融合特征的多目标雷达回波关联方法和系统。
背景技术:
1、多目标雷达跟踪是将各个时刻对目标的雷达回波测量数据与目标相互关联在一起的过程。传统的雷达目标跟踪方法主要分为”预测“和”关联“两个部分,通过当前时刻已经与目标相关联的测量数据推测出下一时刻的目标的估计数据,借助估计数据与下一时刻的测量数据相互之间的对比来进行目标与测量数据的关联。然而,在实现本发明的过程中,传统的雷达目标跟踪方法对于密集群目标难以实现有效跟踪,跟踪过程常会出现跟丢、跟混的情况,存在着目标跟踪能力不足的技术问题。
技术实现思路
1、针对上述传统方法中存在的问题,本发明提出了一种基于融合特征的多目标雷达回波关联方法以及一种基于融合特征的多目标雷达回波关联系统,能够有效提高雷达对于密集群目标的目标跟踪能力。
2、为了实现上述目的,本发明实施例采用以下技术方案:
3、一方面,提供一种基于融合特征的多目标雷达回波关联方法,包括步骤:
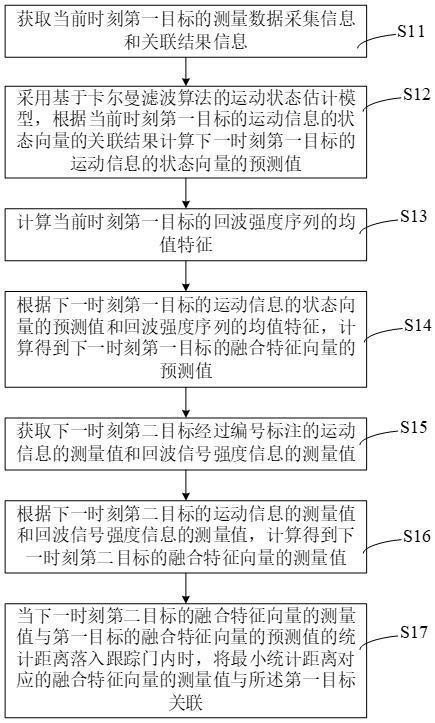
4、获取当前时刻第一目标的测量数据采集信息和关联结果信息;测量数据采集信息包括经过编号标注的运动信息的测量数据和回波信号强度信息的测量数据,关联结果信息包括运动信息的状态向量的关联结果和回波强度序列;
5、采用基于卡尔曼滤波算法的运动状态估计模型,根据当前时刻第一目标的运动信息的状态向量的关联结果计算下一时刻第一目标的运动信息的状态向量的预测值;
6、计算当前时刻第一目标的回波强度序列的均值特征;
7、根据下一时刻第一目标的运动信息的状态向量的预测值和回波强度序列的均值特征,计算得到下一时刻第一目标的融合特征向量的预测值;
8、获取下一时刻第二目标经过编号标注的运动信息的测量值和回波信号强度信息的测量值;
9、根据下一时刻第二目标的运动信息的测量值和回波信号强度信息的测量值,计算得到下一时刻第二目标的融合特征向量的测量值;
10、当下一时刻第二目标的融合特征向量的测量值与第一目标的融合特征向量的预测值的统计距离落入跟踪门内时,将最小统计距离对应的融合特征向量的测量值与第一目标关联。
11、在其中一个实施例中,上述的基于融合特征的多目标雷达回波关联方法还包括步骤:
12、当下一时刻第二目标的融合特征向量的测量值与第一目标的融合特征向量的预测值的统计距离未落入跟踪门内时,将下一时刻第二目标的融合特征向量的测量值判定为不属于第一目标。
13、在其中一个实施例中,基于卡尔曼滤波算法的运动状态估计模型为:
14、;
15、其中,为第个目标在下一时刻的运动信息的状态向量的预测值,为第个目标在当前时刻的运动信息的状态向量的关联结果,为当前时刻的目标状态转移矩阵,为当前时刻的过程噪声。
16、另一方面,还提供一种基于融合特征的多目标雷达回波关联系统,包括雷达多目标数据采集与预处理模块、轨迹预测模块、强度特征模块、融合特征相似度计算模块和同一性关联判别模块;
17、雷达多目标数据采集与预处理模块用于获取当前时刻第一目标的测量数据采集信息和关联结果信息,以及用于获取下一时刻第二目标经过编号标注的运动信息的测量值和回波信号强度信息的测量值;测量数据采集信息包括经过编号标注的运动信息的测量数据和回波信号强度信息的测量数据,关联结果信息包括运动信息的状态向量的关联结果和回波强度序列;
18、轨迹预测模块用于采用基于卡尔曼滤波算法的运动状态估计模型,根据当前时刻第一目标的运动信息的状态向量的关联结果计算下一时刻第一目标的运动信息的状态向量的预测值;
19、强度特征模块用于计算当前时刻第一目标的回波强度序列的均值特征;
20、融合特征相似度计算模块用于根据下一时刻第一目标的运动信息的状态向量的预测值和回波强度序列的均值特征,计算得到下一时刻第一目标的融合特征向量的预测值,以及用于根据下一时刻第二目标的运动信息的测量值和回波信号强度信息的测量值,计算得到下一时刻第二目标的融合特征向量的测量值;
21、同一性关联判别模块用于在下一时刻第二目标的融合特征向量的测量值与第一目标的融合特征向量的预测值的统计距离落入跟踪门内时,将最小统计距离对应的融合特征向量的测量值与第一目标关联。
22、在其中一个实施例中,同一性关联判别模块还用于在下一时刻第二目标的融合特征向量的测量值与第一目标的融合特征向量的预测值的统计距离未落入跟踪门内时,将下一时刻第二目标的融合特征向量的测量值判定为不属于第一目标。
23、在其中一个实施例中,基于卡尔曼滤波算法的运动状态估计模型为:
24、;
25、其中,为第个目标在下一时刻的运动信息的状态向量的预测值,为第个目标在当前时刻的运动信息的状态向量的关联结果,为当前时刻的目标状态转移矩阵,为当前时刻的过程噪声。
26、又一方面,还提供一种目标跟踪设备,包括存储器和处理器,存储器存储有计算机程序,处理器执行计算机程序时实现上述的基于融合特征的多目标雷达回波关联方法的步骤。
27、再一方面,还提供一种计算机可读存储介质,其上存储有计算机程序,计算机程序被处理器执行时实现上述的基于融合特征的多目标雷达回波关联方法的步骤。
28、上述技术方案中的一个技术方案具有如下优点和有益效果:
29、上述基于融合特征的多目标雷达回波关联方法和系统,在雷达观测的多个目标轨迹接近的情况下,通过当前时刻已经与目标相关联的轨迹观测信息,推测出下一时刻的目标的估计轨迹信息,结合当前时刻前的回波信号强度构建融合特征,通过融合特征、下一时刻的轨迹和回波信号强度联合观测信息相互之间的对比,实现目标间的精确关联,该设计创新性的采用了回波信号强度与轨迹形成的融合特征进行同一性相关计算,有效提高了目标关联精度,大幅减少了密集群目标雷达观测过程中出现的跟丢、跟混的情况,从而有效提高了雷达对于密集群目标的目标跟踪能力。
技术特征:
1.一种基于融合特征的多目标雷达回波关联方法,其特征在于,包括步骤:
2.根据权利要求1所述的基于融合特征的多目标雷达回波关联方法,其特征在于,还包括步骤:
3.根据权利要求1或2所述的基于融合特征的多目标雷达回波关联方法,其特征在于,基于卡尔曼滤波算法的运动状态估计模型为:
4.一种基于融合特征的多目标雷达回波关联系统,其特征在于,包括雷达多目标数据采集与预处理模块、轨迹预测模块、强度特征模块、融合特征相似度计算模块和同一性关联判别模块;
5.根据权利要求4所述的基于融合特征的多目标雷达回波关联系统,其特征在于,所述同一性关联判别模块还用于在下一时刻第二目标的融合特征向量的测量值与第一目标的融合特征向量的预测值的统计距离未落入跟踪门内时,将下一时刻第二目标的融合特征向量的测量值判定为不属于所述第一目标。
6.根据权利要求4或5所述的基于融合特征的多目标雷达回波关联系统,其特征在于,基于卡尔曼滤波算法的运动状态估计模型为:
技术总结
本发明涉及基于融合特征的多目标雷达回波关联方法和系统,该方法在雷达观测的多个目标轨迹接近的情况下,通过当前时刻已经与目标相关联的轨迹观测信息,推测出下一时刻的目标的估计轨迹信息,结合当前时刻前的回波信号强度构建融合特征,通过融合特征、下一时刻的轨迹和回波信号强度联合观测信息相互之间的对比,实现目标间的精确关联,该设计创新性的采用了回波信号强度与轨迹形成的融合特征进行同一性相关计算,有效提高了目标关联精度,大幅减少了密集群目标雷达观测过程中出现的跟丢、跟混的情况,从而有效提高了雷达对于密集群目标的目标跟踪能力。
技术研发人员:王楠,袁彦泽,王伟,洪华杰,邢堃盛,吴家宽,蒋宇杰
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:
技术公布日:2024/7/18
- 还没有人留言评论。精彩留言会获得点赞!