一种海洋底泥采样方法与流程
本发明涉及海底采样,尤其是涉及一种海洋底泥采样方法。
背景技术:
1、海洋沉积物质组成、沉积速率、底质微生物群落分布、污染物组成是研究海洋水动力、污染物、微生物的关键,海洋底泥采样是重要的研究手段。当前存在取样方式主要通过人工前往采样点进行采样,但是人工操作不便利,一次采样出航需要大量的人力物力,成本高。可见研究出一套使用便捷、采样稳定的海洋底泥采样装置成为行业需求,且急迫待解决。
技术实现思路
1、本发明的主要目的在于提供一种海洋底泥采样方法,以解决上述技术问题,提高采样的便捷性。
2、为实现上述目的,本发明采用如下技术方案:
3、一种海洋底泥采样方法,其特征在于,包括有浮标、采样船和云控中心,所述采样船装载于所述浮标中,所述云控中心与所述浮标和所述采样船电连接,所述采样船包括有船体、驱动结构、采样结构、声呐结构和控制器,所述驱动结构安装于所述船体的尾部,所述采样结构安装于所述船体中,所述船体中设置有船舱,所述声呐结构和所述控制器安装于所述船舱中;
4、所述控制器包括有导航模块、主控制模块、采样模块、gps模块和声呐处理模块,所述主控制模块分别与所述导航模块、所述主控制模块、所述采样模块、所述gps模块和所述声呐处理模块电连接,所述采样模块与所述采样结构电连接,所述声呐结构与所述声呐处理模块电连接,所述导航模块与所述驱动结构电连接,所述gps模块识别当前所述采样船的位置;
5、所述采样结构包括有放线单元、定滑轮、编码器、采样器和采样绳,所述采样绳绕设于所述放线单元上,所述定滑轮与所述编码器连接,所述采样器固定于所述采样绳的端部,所述采样绳经过所述定滑轮;
6、上述方法包括以下步骤:
7、s1、所述云控中心将需要采样的水域定位发送至所述主控制模块中;
8、s2、所述主控制模块将水域定位发送至所述导航模块中,所述导航模块根据当前水域状况设定所述采样船的行驶路径;
9、s3、所述采样船驶离所述浮标,所述驱动结构驱动所述采样船沿行驶路径行进至采样水域后停止;
10、s4、所述声呐结构启动,捕捉当前所述采样船的所在水域的海底情况并测量当前水域深度,并发送至所述声呐处理模块;
11、s5、若当前海底满足采样需求,则所述采样模块根据所述声呐处理模块所得的水域深度,设定所述采样绳放卷长度,当编码器识别到所述采样绳放卷到设定长度,所述采样模块控制所述放线单元停止;
12、s6、所述采样器驱动对海洋底泥进行采样,随后所述采样模块控制所述放线单元收卷采样绳;
13、s7、采样完成后,所述导航模块根据行驶路径返航至所述浮标中。
14、作为一种优选的技术方案,在步骤s5中,当声呐处理模块识别到当前海底情况存在异物,且异物数量或大小足以影响采样器的投放,所述采样船向前移动一小段距离,避开异物影响处,再进行采样器的投放。
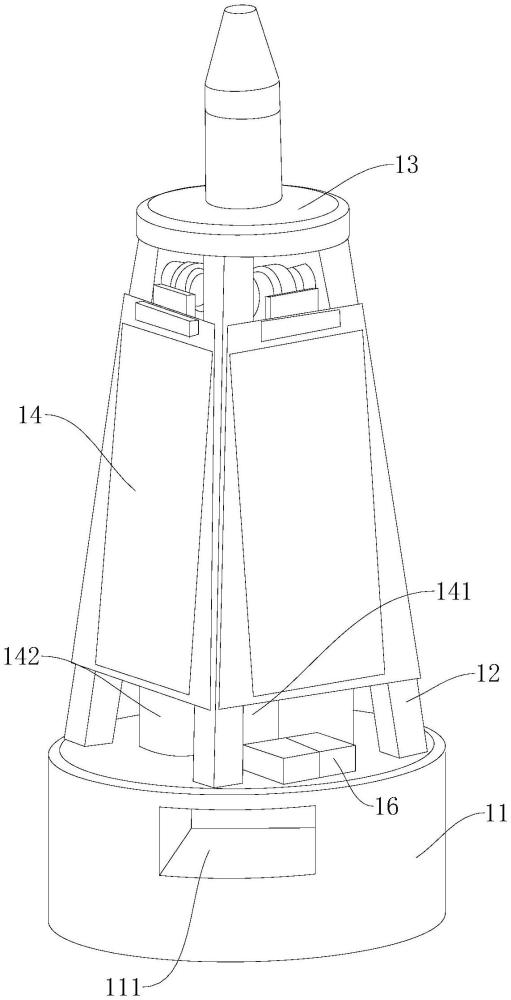
15、作为一种优选的技术方案,所述浮标包括浮台、立杆、顶板和太阳能组件,所述立杆固设于所述浮台的上端,所述顶板固设于所述立杆的上端,所述太阳能组件安装于所述浮台和所述顶板之间。
16、作为一种优选的技术方案,所述太阳能组件包括有气缸、升降座、导向轴、长连杆、短连杆、太阳能板、转动板和固定座,所述导向轴固设于所述浮台与所述顶板之间,所述固定座固设于所述导向轴的上侧,所述升降座沿所述导向轴移动,所述长连杆的一端铰接设置于所述升降座上,所述短连杆的一端铰接设置于所述固定座上,所述短连杆的另一端与所述长连杆的另一端铰接连接,所述转动板固设于所述短连杆上,所述太阳能板固设于所述转动板上,所述气缸固设于所述浮台上,所述气缸驱动所述升降座沿所述导向轴移动。
17、作为一种优选的技术方案,所述放线单元包括有收卷盘、支架和底座,所述收卷盘通过所述支架安装于所述底座上,所述采样绳缠绕于所述收卷盘上。
18、作为一种优选的技术方案,所述驱动结构包括有驱动器和船桨,所述驱动器驱动所述船桨转动。
19、作为一种优选的技术方案,所述采样器包括有采样筒、采样电机、联轴器和螺旋钻杆,所述采样电机安装于所述采样筒中,所述采样电机通过所述联轴器与所述螺旋钻杆连接,所述采样电机驱动所述螺旋钻杆旋转。
20、作为一种优选的技术方案,所述采样船上设置有摄像头,所述摄像头安装于所述船体的前端,所述浮台上设置有可供所述采样船停泊的停泊口,所述采样船停泊至所述浮台的步骤如下:
21、s7.1、所述采样船行驶至靠近所述停泊口;
22、s7.2、所述摄像头拍照识别所述停泊口的位置,并通过所述导航模块设置停泊路径;
23、s7.3、所述驱动结构驱动所述船体沿停泊路径进入至所述停泊口。
24、作为一种优选的技术方案,所述浮台上设置有用于储存样品的储存组件,所述储存组件包括有转动电机、齿轮、转盘和采样筒,所述采样筒沿所述转盘边缘有序安装于所述转盘上,所述齿轮与所述转盘啮合,所述转动电机驱动所述齿轮转动。
25、本发明的有益效果在于:上述海洋底泥采样方法,能够控制采样船自动行驶至采样点进行采样,采样完成后可以自动返航并将样品储存于浮标中,以待工作人工前往浮标进行取样,浮标中可储存多个样品,无需操作人员多次采样,提高采样的便捷性和效率。
技术特征:
1.一种海洋底泥采样方法,其特征在于,包括有浮标、采样船和云控中心,所述采样船装载于所述浮标中,所述云控中心与所述浮标和所述采样船电连接,所述采样船包括有船体、驱动结构、采样结构、声呐结构和控制器,所述驱动结构安装于所述船体的尾部,所述采样结构安装于所述船体中,所述船体中设置有船舱,所述声呐结构和所述控制器安装于所述船舱中;
2.根据权利要求1所述的海洋底泥采样方法,其特征在于,在步骤s5中,当声呐处理模块识别到当前海底情况存在异物,且异物数量或大小足以影响采样器的投放,所述采样船向前移动一小段距离,避开异物影响处,再进行采样器的投放。
3.根据权利要求2所述的海洋底泥采样方法,其特征在于,所述浮标包括浮台、立杆、顶板和太阳能组件,所述立杆固设于所述浮台的上端,所述顶板固设于所述立杆的上端,所述太阳能组件安装于所述浮台和所述顶板之间。
4.根据权利要求3所述的海洋底泥采样方法,其特征在于,所述太阳能组件包括有气缸、升降座、导向轴、长连杆、短连杆、太阳能板、转动板和固定座,所述导向轴固设于所述浮台与所述顶板之间,所述固定座固设于所述导向轴的上侧,所述升降座沿所述导向轴移动,所述长连杆的一端铰接设置于所述升降座上,所述短连杆的一端铰接设置于所述固定座上,所述短连杆的另一端与所述长连杆的另一端铰接连接,所述转动板固设于所述短连杆上,所述太阳能板固设于所述转动板上,所述气缸固设于所述浮台上,所述气缸驱动所述升降座沿所述导向轴移动。
5.根据权利要求4所述的海洋底泥采样方法,其特征在于,所述放线单元包括有收卷盘、支架和底座,所述收卷盘通过所述支架安装于所述底座上,所述采样绳缠绕于所述收卷盘上。
6.根据权利要求4所述的海洋底泥采样方法,其特征在于,所述驱动结构包括有驱动器和船桨,所述驱动器驱动所述船桨转动。
7.根据权利要求4所述的海洋底泥采样方法,其特征在于,所述采样器包括有采样筒、采样电机、联轴器和螺旋钻杆,所述采样电机安装于所述采样筒中,所述采样电机通过所述联轴器与所述螺旋钻杆连接,所述采样电机驱动所述螺旋钻杆旋转。
8.根据权利要求4所述的海洋底泥采样方法,其特征在于,所述采样船上设置有摄像头,所述摄像头安装于所述船体的前端,所述浮台上设置有可供所述采样船停泊的停泊口,所述采样船停泊至所述浮台的步骤如下:
9.根据权利要求8所述的海洋底泥采样方法,其特征在于,所述浮台上设置有用于储存样品的储存组件,所述储存组件包括有转动电机、齿轮、转盘和采样筒,所述采样筒沿所述转盘边缘有序安装于所述转盘上,所述齿轮与所述转盘啮合,所述转动电机驱动所述齿轮转动。
技术总结
本发明涉及一种海洋底泥采样方法,云控中心将需要采样的水域定位发送至主控制模块中;主控制模块将水域定位发送至导航模块中,导航模块根据当前水域状况设定采样船的行驶路径;采样船驶离浮标,驱动结构驱动采样船沿行驶路径行进至采样水域后停止;声呐结构启动,捕捉当前采样船的所在水域的海底情况并测量当前水域深度,并发送至声呐处理模块;采样器驱动对海洋底泥进行采样,随后采样模块控制放线单元收卷采样绳;采样完成后,导航模块根据行驶路径返航至浮标中。上述海洋底泥采样方法,能够控制采样船自动行驶至采样点进行采样,采样完成后可以自动返航并将样品储存于浮标中,以待工作人工前往浮标进行取样,提高采样的便捷性和效率。
技术研发人员:田新会,刘益片,龚伟,陈灿林
受保护的技术使用者:广东德量环保科技有限公司
技术研发日:
技术公布日:2024/10/10
- 还没有人留言评论。精彩留言会获得点赞!