基于高精度编码器的智能数处理系统的制作方法
本发明涉及电机校准分析,具体为基于高精度编码器的智能数处理系统。
背景技术:
1、高精度编码器是一种精确测量设备,用于检测和反馈位置、速度以及运动控制中的方向信息;高精度编码器在现代工业自动化和精密工程领域中扮演着至关重要的角色。通过提供精确的位置和速度反馈,这类设备使系统能够以高精度执行复杂的动作和操作。
2、公开号为cn114543718a的申请一种旋转编码器的校准方法,包括:控制伺服电机带动待校准编码器的电机旋转;其中,电机的电机轴和待校准编码器的码盘固定连接;当电机达到匀速旋转状态,则每间隔预设时长读取一次待校准编码器的码盘位置数据;根据伺服电机带动电机匀速旋转状态的转速和预设时长,确定码盘位置数据对应的理论位置数据;根据理论位置数据和码盘位置数据,确定待校准编码器的校准量。本申请在待校准编码器处于匀速旋转状态时读取码盘位置数据,并基于转速和旋转时长推导出理论位置数据,最终确定出待校准编码器的校准量;降低校准难度并实现高精度校准。
3、其高精度编码器针对于伺服电机的相关校准工作时,一般基于对应伺服电机的转动过程,其高精度编码器展示其相关转子的所在位置,识别其二者相关位置的相关差异,识别此伺服电机在转动时是否存在精度问题,但在实际处理过程中,其伺服电机存在一个加速阶段,此加速阶段很容易造成误差精度,从而导致伺服电机的精度存在问题,其数据处理过程并不精准,无法达到更为精准的处理效果。
技术实现思路
1、针对现有技术的不足,本发明提供了基于高精度编码器的智能数处理系统,解决了原始的处理方式无法达到更为精准的处理效果的问题。
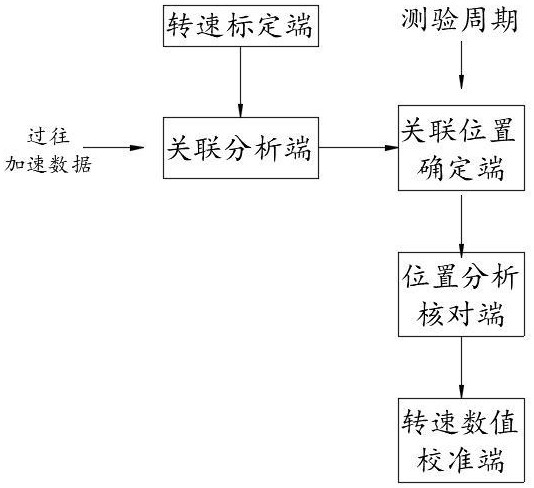
2、为实现以上目的,本发明通过以下技术方案予以实现:基于高精度编码器的智能数处理系统,包括:
3、转速标定端,由相关操作人员进行转速标定,使伺服电机按照所标定的转速进行运行,其所标定的转速为预设的标准转速值;
4、关联分析端,基于本伺服电机所标定的转速,获取此伺服电机在此转速状态下过往的加速数据,并对过往的加速数据进行相关分析,从具体的分析结果中,选定属于此伺服电机的标准加速数值区间,具体方式为:
5、基于所标定的转速z,从过往的加速数据中,获取对应伺服电机加速至z时的n组加速数据,其中n为预设值,从加速数据中确定加速度ai,其中i代表不同的加速数据,且i=1、2、……、n,n代表加速数据的总数;
6、将所确定的若干组加速度ai按照数值从小至大的方式进行排序,生成加速度序列,并从加速度序列内一一确定同特征序列:从序列内第一组加速度开始,往后依次选取相关的加速度统一进行方差处理,所产生的方差值f≤y1时,再次进行数据选取,当方差值f>y1时,将所选取的加速度作为临界值,除去临界值将本阶段所选取的若干组加速度标定为同特征序列,再从临界值开始,对后方的同特征序列进行一一确认,其中y1为预设值;
7、将相关的同特征序列内部的若干组加速度的个数标定为gk,其中k代表不同的同特征序列,并将不同的同特征序列所对应的方差标定为fk,采用xdk=fk×c1+gk×c2确认对应同特征序列的选定值xdk,其中c1以及c2均为预设的固定系数因子;
8、将选定值xdk最大的同特征序列标定为标准序列,从标准序列内选定加速度的最大值以及最小值确定标准加速数值区间;
9、关联位置确定端,基于所确定的标准加速数值区间,对伺服电机的加速时段进行相关确定,并基于所设定的测验周期以及伺服电机的转速,确认此伺服电机的在本测验周期结束时的理论位置,其中测验周期为预设周期,具体方式为:
10、从标准加速数值区间内选取最小加速度,识别此伺服电机在最小加速度的加速状态下,加速至所标定的转速的时长t1,其中t1=z÷aimin,其中aimin为最小加速度,其中z为所标定的转速,基于高精度编码器确认此伺服电机内部转子在经过加速时长t1时刻后的相关位置,标定为初始位置;
11、基于所设定的测验周期t以及伺服电机的转速z,确认其相关的转动时间线(t-t1),基于预设的转速z,确定本伺服电机内部转子的转动圈数:q=z×(t-t1),其q为转动圈数,基于所确定的转动圈数以及初始位置,确定测验周期t结束时,其伺服电机内部转子所能到达的理论位置,并将所确认的理论位置传输至位置分析核对端内;
12、位置分析核对端,在测验周期结束时,通过高精度编码器确认对应伺服电机内部转子的实际位置,再基于所确认的理论位置,进行位置核对,确定两组位置是否均为同一位置:
13、若属于同一位置,则不进行任何处理,生成数值处理正常信号并展示;
14、若未属于同一位置,则生成位置异常信号并展示,并执行转速数值校准端进行转速校准,使后续所确认的理论位置与实际位置处于同一位置;
15、转速数值校准端,基于所确定的实际位置以及理论位置,识别两组位置之间的关联转速差值,并基于所确认的转速差值,对伺服电机的运行转速进行相关校准,具体方式为:
16、基于所确定的实际位置以及理论位置,对两组位置的前后关系进行确认:
17、若实际位置位于理论位置之后,记录二者位置之间的距离周长zs,再确定本转子转动一圈的转动周长ss,确认周长的距离差值比zb=zs÷ss;
18、基于所设定的转速z以及所确定的距离差值比,对设定的转速z进行校准,使转速z增加至(z+zb),后续以(z+zb)作为z进行相关运行,保持实际位置与理论位置一致;
19、若所述实际位置位于理论位置之前,则生成测验错误信号进行展示。
20、本发明提供了基于高精度编码器的智能数处理系统。与现有技术相比具备以下有益效果:
21、本发明通过对伺服电机进行相关测验时,基于所设定的转速,对此类转速过往的加速度数据进行分析,从所分析的若干组数据中,对数据离散程度较低的相关数据进行同特征绑定,确定相关的同特征序列,再对每个同特征序列所涉及的加速度个数以及相关的方差进行确定,从若干个同特征序列中选取最佳的同特征序列,方便后续在进行数据处理时,其数值校准的精度更高,能达到更好的校准处理效果;
22、后续,在进行位置校准处理过程中,基于所确定的加速度,确定一个相关的加速时段,再剔除加速时段的加速过程,将此类过程剔除后,对实际位置与理论位置进行校准,基于校准结果,确定后续具体的校准值,便可保障伺服电机在后续的相关位置处于一致状态,同理针对于其他的转速,进行等比例调节即可,基于高精度编码器便可对伺服电机达到一个更好的校准处理效果。
技术特征:
1.基于高精度编码器的智能数处理系统,其特征在于,包括:
2.根据权利要求1所述的基于高精度编码器的智能数处理系统,其特征在于,所述位置分析核对端,确定两组位置是否均为同一位置包括:
3.根据权利要求2所述的基于高精度编码器的智能数处理系统,其特征在于,所述位置分析核对端,确定两组位置是否均为同一位置还包括:
4.根据权利要求1所述的基于高精度编码器的智能数处理系统,其特征在于,所述转速数值校准端,对伺服电机的运行转速进行相关校准的具体方式为:
5.根据权利要求4所述的基于高精度编码器的智能数处理系统,其特征在于,若所述实际位置位于理论位置之前,则生成测验错误信号进行展示。
技术总结
本发明公开了基于高精度编码器的智能数处理系统,本发明涉及电机校准分析技术领域,解决了原始的处理方式无法达到更为精准的处理效果的问题,本发明通过对伺服电机进行相关测验时,基于所设定的转速,对此类转速过往的加速度数据进行分析,从所分析的若干组数据中,对数据离散程度较低的相关数据进行同特征绑定,确定相关的同特征序列,再对每个同特征序列所涉及的加速度个数以及相关的方差进行确定,从若干个同特征序列中选取最佳的同特征序列,方便后续在进行数据处理时,其数值校准的精度更高,能达到更好的校准处理效果,将加速阶段进行剔除,对实际位置与理论位置进行校准,便可保障伺服电机在后续的相关位置处于一致状态。
技术研发人员:易港,李鸣
受保护的技术使用者:钛虎机器人科技(上海)有限公司
技术研发日:
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!