一种基于偏振的水下多光谱图像获取方法和装置
本发明属于水下光学成像领域,特别涉及一种基于偏振的水下多光谱图像获取方法和装置。
背景技术:
1、不同波段的光谱信息提供不同的水质数据,使用多光谱相机可以实现全面水质检测。例如使用蓝光波段检测水中悬浮物质浓度,使用近红外波段检测水中藻类繁殖情况,使用紫外波段检测水中溶解有机物含量。但是水中悬浮散射颗粒对光场的散射和吸收显著降低成像清晰度,影响传感器获取的光谱数据。此外,不同波段的光在水下环境中折射和散射均不相同,采用相同的处理会影响传感器获取的光谱数据。目前基于偏振的水下成像方法着重于数字处理算法,忽视光学处理的重要性。原始多光谱图像的质量影响后续算法处理的结果,高质量原始多光谱图像的获取是实现准确水质检测的重要第一步。与本申请最接近的是付强等人提出的一种基于堆叠偏振片阵列的多光谱偏振成像装置及方法(cn115855259a)通过180个固定角度偏振片的激活和停用以获取不同偏振角度的图像,此方法还实现同时不同光谱图像的获取,但所需偏振片过多并且线性偏振光在水下传播会发生严重偏振态扰动。因此,需要一种新的方法和系统实现水下多光谱图像获取。
技术实现思路
1、为满足技术背景中的需求,本发明提供一种基于偏振的水下多光谱图像获取方法和系统。
2、本发明的技术方案:
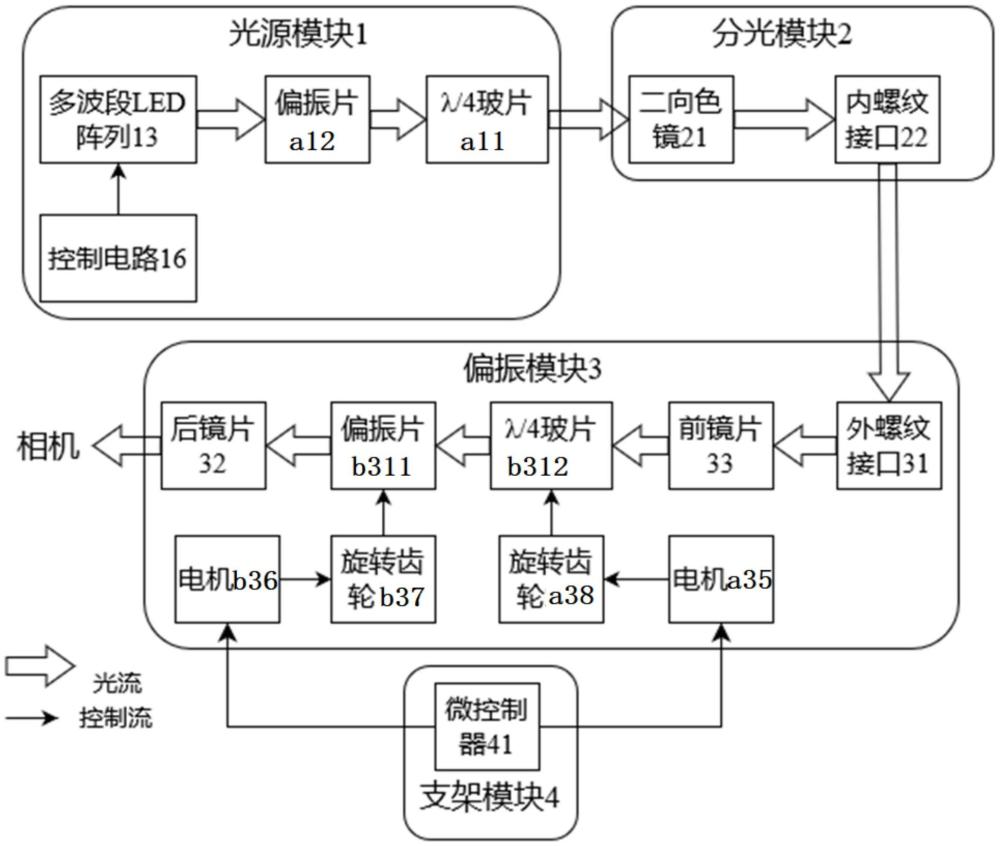
3、一种基于偏振的水下多光谱图像获取装置,包括光源模块1、分色模块2、偏振模块3和支架模块4;
4、所述光源模块1提供波段和光强可控的光源以适应不同水下环境;所述分色模块2实现对不同波段范围入射光的分光;所述偏振模块3减少光中后向散射的干扰,包括自动模式和手动模式两种调节方式;所述支架模块4实现对偏振模块3与相机的固定和位置调节。
5、所述光源模块1包括玻片a11、偏振片a12、多波段led阵列13、可弯曲金属导管a14、基座15、控制电路16和电源线和信号线组a17;
6、所述分色模块2包括二向色镜21和内螺纹接口22;
7、所述偏振模块3包括外螺纹接口31、后镜片32、前镜片33、弯曲金属导管b34、电机a35、电机b36、旋转齿轮b37、旋转齿轮a38、镜片齿轮a39、镜片齿轮b310、偏振片b311、玻片b312、承重齿轮a313、承重齿轮b314和承重轴315;
8、所述支架模块4包括微控制器41、伸缩架42、海绵43和电源线和信号线组b44;
9、所述玻片a11、偏振片a12、多波段led阵列13通过可弯曲金属导管a14依次按照先后顺序固定于基座15上方;所述控制电路16固定于基座15内部,水下机器人通过电源线和信号线组a17与控制电路16相连,为光源模块1供电并发送控制信号;
10、所述旋转齿轮b37和旋转齿轮a38分别固定于电机b36和电机a35的转动轴上;所述偏振片b311和玻片b312分别共圆心镶嵌于镜片齿轮a39和镜片齿轮b310内;后镜片32位于偏振片b311之后,前镜片33位于玻片b312之前,所述偏振片b311、玻片b312、后镜片32和前镜片33平面平行且中心共线;所述镜片齿轮a39在齿轮最高点与旋转齿轮a38啮合,在齿轮最低点与承重齿轮a313啮合;所述镜片齿轮b310在齿轮最高点与旋转齿轮b37啮合,在齿轮最低点与承重齿轮b314啮合;所述承重齿轮a313和承重齿轮b314通过轴承固定于承重轴315上,承重齿轮a313和承重齿轮b314的转动相互不影响;水下机器人通过电源线和信号线组b44与偏振模块3相连,为偏振模块3供电并发送控制信号。
11、导线和信号线通过可弯曲金属导管a14内部将多波段led阵列13和控制电路16相连;导线和信号线通过可弯曲金属导管b34内部将电机a35和电机b36分别与微控制器41相连;
12、进一步地,所述多波段led阵列13集成多个led芯片,控制电路16根据实际需求控制每个芯片发射不同波段和不同光强的光,允许光源模块1同时提供部分紫外光、可见光和近红外光;
13、所述分色模块2根据实际检测需求选用将入射光分离为不同数量波段光的二向色镜21,每个分光出口有内螺纹接口22;每个分光出口通过内螺纹接口22和外螺纹接口31连接偏振模块3;
14、进一步地,所述微控制器41通过信号线控制所述电机a35和电机b36的转动角度;所述电机a35和电机b36旋转分别带动所述旋转齿轮a38和旋转齿轮b37旋转;所述旋转齿轮a38和旋转齿轮b37通过齿轮传动实现镜片齿轮a39和镜片齿轮b310的旋转进而实现偏振片b311和玻片b312的旋转;
15、进一步地,所述偏振模块3中电机a35和电机b36的转动角度调节分为自动模式和手动模式;自动模式下的电机a35和电机b36的转动角度为相机成像最大拉普拉斯方差对应的旋转角度;手动模式下的电机a35和电机b36的转动角度为人眼判断成像最清晰对应的旋转角度;
16、所述支架模块4通过伸缩架42和海绵43夹紧相机,通过调节可弯曲金属导管b34调节偏振模块3的位置,使后镜片32贴紧相机镜头;
17、进一步地,相机可以根据需要选择多光谱相机、rgb相机、紫外相机或者红外相机;
18、玻片
19、一种基于偏振的水下多光谱图像获取方法,具体如下:
20、光流由多波段led阵列13发出,经过偏振片a12变为固定偏振态的线性偏振光;线性偏振光经过玻片a11变为圆偏振光,圆偏振光作为系统出射光;系统入射光包括目标反射系统出射光的目标信息光和背景散射光;入射光经过二向色镜21分为不同波段的光;每个波段的光分别依次经过内螺纹接口22、外螺纹接口31、前镜片33和玻片b312变为线性偏振光;线性偏振光经过偏振片b311变为固定偏振态的线性偏振光;固定偏振态的线性偏振光经过后镜片32到达相机进行成像;多个相机的图像合并得到多光谱图像;
21、系统出射光的圆偏振光在水中传播时,受到的散射和介质特性变化导致其原本的电场矢量旋转路径发生改变,正交分量的相位差和振幅发生变化,不再严格保持90°的相位关系,圆偏振光逐渐变为椭圆偏振光;不同波段的光在水下环境中折射和散射均不相同,分别产生不同的偏振态扰动;所述分色模块2将不同波段的光分离并独立调节各自偏振模块3的偏振片b311和玻片b312使得背景光偏振方向与相互正交的偏振片b311透过方向均为45°,最大化过滤背向散射光实现各个波段光最清晰成像效果,最后合并各个波段的成像为多光谱图像。
22、本发明的有益效益:本方法和系统提供一种基于偏振的水下多光谱图像获取系统,利用圆偏振光的保偏性同时调节不同波段的偏振片和玻片过滤后向散射光得到高质量的多光谱光波。系统还可以根据需求灵活组合使用rgb相机、紫外相机和红外相机替代多光谱相机成像,减少成本。
技术特征:
1.一种基于偏振的水下多光谱图像获取装置,其特征在于,包括光源模块(1)、分色模块(2)、偏振模块(3)和支架模块(4);
2.根据权利要求1所述的一种基于偏振的水下多光谱图像获取装置,其特征在于,所述多波段led阵列(13)集成多个led芯片,控制电路(16)根据实际需求控制每个芯片发射不同波段和不同光强的光,允许光源模块(1)同时提供部分紫外光、可见光和近红外光。
3.根据权利要求1所述的一种基于偏振的水下多光谱图像获取装置,其特征在于,所述微控制器(41)通过信号线控制所述电机a(35)和电机b(36)的转动角度;所述电机a(35)和电机b(36)旋转分别带动所述旋转齿轮a(38)和旋转齿轮b(37)旋转;所述旋转齿轮a(38)和旋转齿轮b(37)通过齿轮传动实现镜片齿轮a(39)和镜片齿轮b(310)的旋转进而实现偏振片b(311)和玻片b(312)的旋转。
4.根据权利要求1所述的一种基于偏振的水下多光谱图像获取装置,其特征在于,所述偏振模块(3)中电机a(35)和电机b(36)的转动角度调节分为自动模式和手动模式;自动模式下的电机a(35)和电机b(36)的转动角度为相机成像最大拉普拉斯方差对应的旋转角度;手动模式下的电机a(35)和电机b(36)的转动角度为人眼判断成像最清晰对应的旋转角度。
5.根据权利要求1所述的一种基于偏振的水下多光谱图像获取装置,其特征在于,相机可以根据需要选择多光谱相机、rgb相机、紫外相机或者红外相机。
6.一种基于偏振的水下多光谱图像获取方法,其特征在于,是采用权利要求1-5任一所述的装置实现的,具体如下:
技术总结
一种基于偏振的水下多光谱图像获取方法和装置,属于水下光学成像领域。由光源模块、分色模块、偏振模块和支架模块组成;光源模块提供波段和光强可控的光源以适应不同水下环境;分色模块实现对不同波段范围入射光的分光;偏振模块减少光中后向散射的干扰;支架模块实现对偏振模块与相机的固定和位置调节。本方法和系统利用圆偏振光的保偏性同时调节不同波段的偏振片和玻片过滤后向散射光得到高质量的多光谱光波。
技术研发人员:朱明
受保护的技术使用者:大连理工大学
技术研发日:
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!