基于微透镜阵列扫描装置的三维光学成像方法
本发明涉及三维成像领域,尤其涉及一种基于微透镜阵列扫描装置的三维光学成像方法。
背景技术:
1、三维成像是感知现实世界立体信息并重建其特征的有效手段。三维成像技术在增强现实/虚拟现实(ar/vr)、自动驾驶、机器人视觉以及工业设计和检测等领域发挥着关键作用。基于结构光的三维成像技术在科学界和工业界发展迅速,在中短距离的高精度测量方面表现出色。
2、目前,结构光三维成像技术一般使用投影仪或激光照射的衍射光学元件(doe)来投射结构光。传统投影机需要精确集成折射镜片和多个组件,难以实现高集成化。衍射光学元件只能在相对较小的视场内产生结构光,并且结构光需要提前校准。基于投影仪和衍射器件的结构光三维成像采用整体投影方法,即无论目标大小及其在设计视场中的位置如何,整体视场都会被结构光照射,导致缺乏选择性和能量分散的问题,进而导致功耗高,检测范围小,不具有视场切换能力。
3、因此,目前亟需解决传统结构光三维成像技术中成像视场小、能量利用率低、结构光指向需要提前标定的问题。
技术实现思路
1、为解决以上问题,本发明提出一种基于微透镜阵列扫描装置的三维光学成像方法,该方法包括:
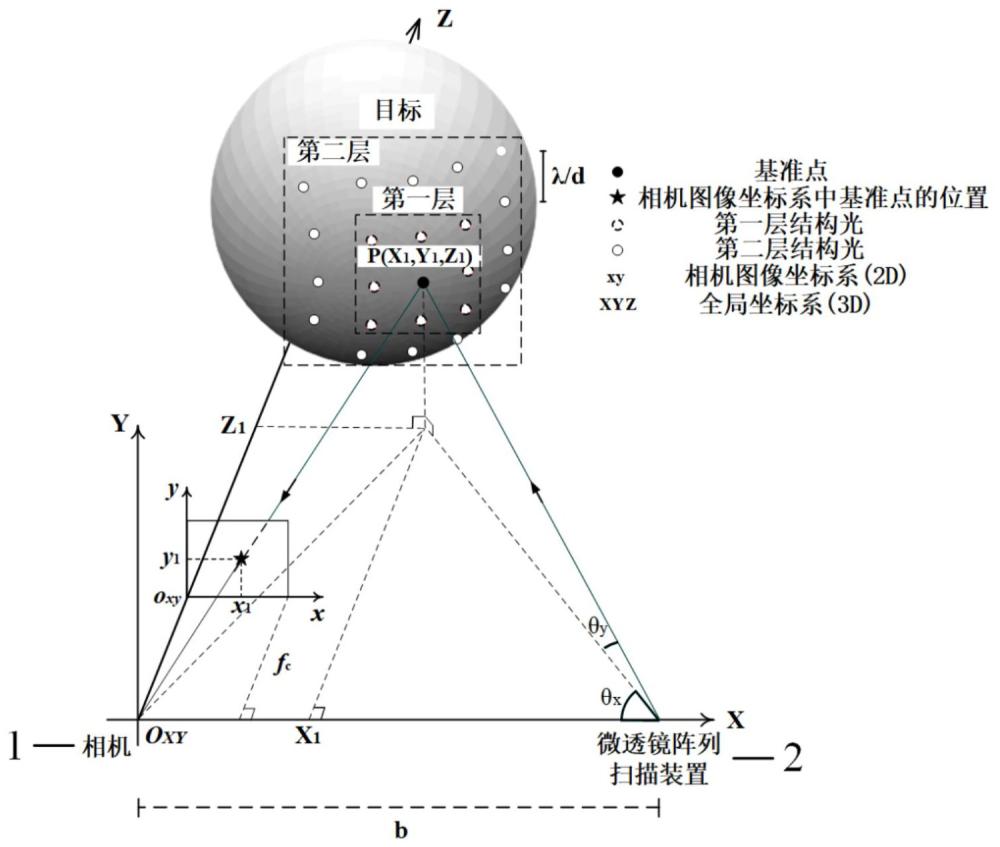
2、s110,微透镜阵列扫描装置向目标发射所生成的定向的结构光,并记录结构光指向;
3、s120,利用相机采集被定向照明目标上的结构光图像,并标定结构光在相机图像坐标系中的坐标;
4、s130,将结构光指向和结构光在相机图像坐标系中的坐标代入三角测量公式,最终重建出目标在全局坐标系中的三维图像。
5、本发明相比于现有技术的有益效果在于:
6、(1)基于微透镜阵列扫描装置的三维光学成像方法可以实现对感兴趣目标的定向结构光照明,具有更高的能量利用率。
7、(2)基于微透镜阵列扫描装置的三维光学成像方法可以实现结构光的在线标定,而不用在测量前进行提前标定。
8、(3)基于微透镜阵列扫描装置的三维光学成像方法中的微透镜阵列扫描技术依靠微米级的相对位移即可实现二维大角度光束扫描,并且不需要复杂的控制电路,因此系统结构简单,易于集成和实现模块化。
技术特征:
1.一种基于微透镜阵列扫描装置的三维光学成像方法,其特征在于,该方法包括以下步骤:
2.根据权利要求1所述的基于微透镜阵列扫描装置的三维光学成像方法,其特征在于,结构光的排布方式由微透镜阵列扫描装置的微透镜阵列的排布方式决定,为方形排布或六边形排布的规则排布方式。
3.根据权利要求1所述的基于微透镜阵列扫描装置的三维光学成像方法,其特征在于,s120中标定的过程包括:
4.根据权利要求1所述的基于微透镜阵列扫描装置的三维光学成像方法,其特征在于,s130中的重建出目标在全局坐标系中的三维图像包括:
5.根据权利要求1所述的基于微透镜阵列扫描装置的三维光学成像方法,其特征在于,
6.根据权利要求1所述的基于微透镜阵列扫描装置的三维光学成像方法,其特征在于,微透镜阵列扫描装置采用透射式光路结构。
7.根据权利要求1所述的基于微透镜阵列扫描装置的三维光学成像方法,其特征在于,所述微透镜阵列扫描装置的驱动装置为双压电晶片驱动器,或者为压电堆驱动器、静电梳齿、音圈电机。
技术总结
本发明公布了一种基于微透镜阵列扫描装置的三维光学成像方法,涉及三维成像领域,该方法包括以下步骤:S110,微透镜阵列扫描装置向目标发射所生成的定向结构光,并记录结构光指向;S120,利用相机采集被定向照明目标上的结构光图像,并标定结构光在相机图像坐标系中的坐标;S130,将结构光指向和结构光在相机图像坐标系中的坐标代入三角测量公式,最终重建出目标在全局坐标系中的三维图像。根据本发明技术方案,可以实现对感兴趣目标的定向结构光照明,具有更高的能量利用率。
技术研发人员:杨旭,耿超,李新阳,李枫,周鑫
受保护的技术使用者:中国科学院光电技术研究所
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!