一种编码器的参考位置点确定方法、系统、设备及介质与流程
本发明涉及编码器领域,特别涉及一种编码器的参考位置点确定方法、系统、设备及介质。
背景技术:
1、增量式编码器有三相信号输出,分别为a信号、b信号和z信号,a信号和b信号用于确定编码器的旋转方向和位置信息,z信号在编码器的每个完整的旋转周期中出现一次,在编码器旋转到特定位置时发出,提供一个参考位置,用于校准编码器的位置计数器或同步系统操作。由于编码器旋转一圈只产生一个z信号,z信号的脉宽由其制造工艺结构决定,这段脉宽可能是a信号、b信号的至少一个周期长度,若只取z信号的上升沿来确认参考位置点,在编码器正转和编码器反转时读出来的位置值将会产生差异和抖动,影响最终位置的判断及速度值的计算精度。
2、因此,如何提供一种解决上述技术问题的方案是本领域技术人员目前需要解决的问题。
技术实现思路
1、本发明的目的是提供一种编码器的参考位置点确定方法、系统、设备及介质,能够降低对处理芯片的编码器接口外设的依赖,增加处理芯片的选择范围,降低成本,无需区分编码器正转或反转,即可确定准确的参考位置点,处理逻辑简单高效,能够消除编码器正反转的参考位置点的偏差,提高最终位置的判断精度及速度值的计算精度。
2、为解决上述技术问题,本发明提供了一种编码器的参考位置点确定方法,应用于处理芯片,所述参考位置点确定方法包括:
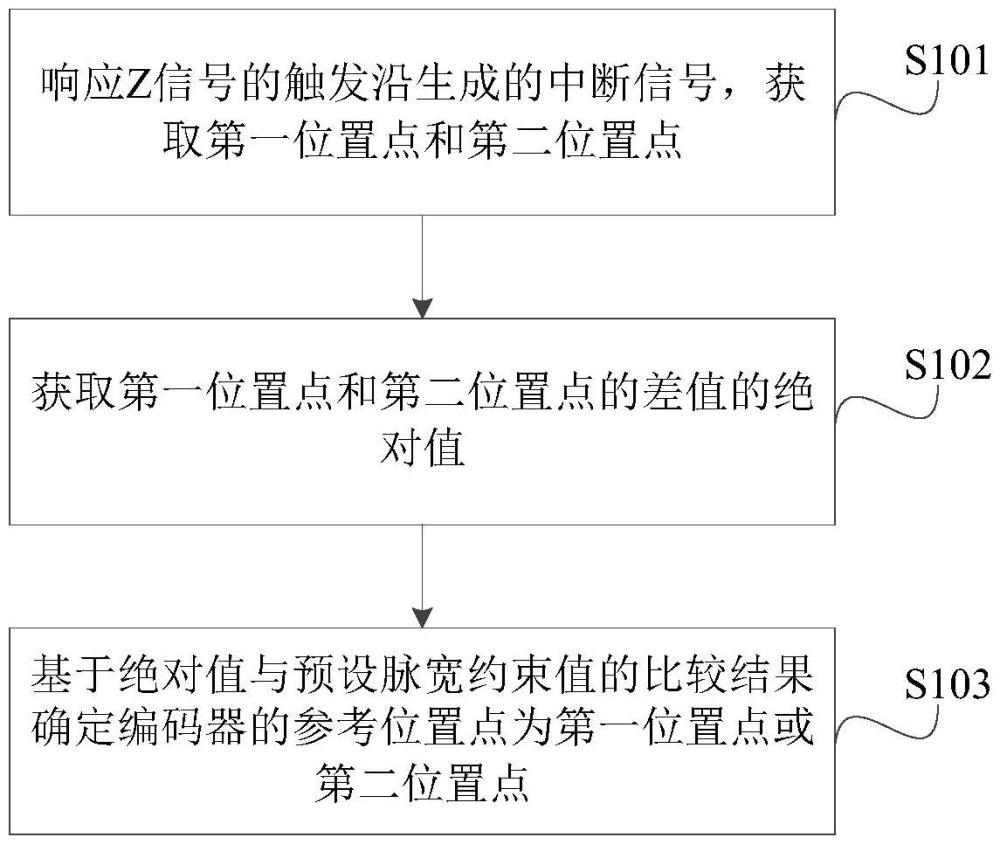
3、响应z信号的触发沿生成的中断信号,获取第一位置点和第二位置点;所述第一位置点和所述第二位置点为两个相邻的所述中断信号对应的位置点,所述触发沿包括上升沿和下降沿;
4、获取所述第一位置点和所述第二位置点的差值的绝对值;
5、基于所述绝对值与预设脉宽约束值的比较结果确定所述编码器的参考位置点为所述第一位置点或所述第二位置点。
6、可选的,所述预设脉宽约束值包括第一脉宽约束值;所述方法还包括:
7、获取所述编码器的线束;
8、基于所述线束确定所述第一脉宽约束值;
9、基于所述绝对值与预设脉宽约束值的比较结果确定所述编码器的参考位置点为所述第一位置点或所述第二位置点的过程包括:
10、基于所述绝对值与所述第一脉宽约束值的比较结果确定所述编码器的参考位置点为所述第一位置点或所述第二位置点。
11、可选的,基于所述线束确定所述第一脉宽约束值的过程包括:
12、基于所述编码器的测量精度和所述线束确定所述第一脉宽约束值,所述第一脉宽约束值为所述测量精度和所述线束的乘积的一半;
13、基于所述绝对值与所述第一脉宽约束值的比较结果确定所述编码器的参考位置点为所述第一位置点或所述第二位置点的过程包括:
14、当所述绝对值小于或等于所述第一脉宽约束值,将所述第一位置点和所述第二位置点中的较小值确定为所述编码器的参考位置点;
15、当所述绝对值大于所述第一脉宽约束值,将所述第一位置点和所述第二位置点中的较大值确定为所述编码器的参考位置点。
16、可选的,基于所述线束确定所述第一脉宽约束值的过程包括:
17、基于所述编码器的测量精度和所述线束确定所述第一脉宽约束值,所述第一脉宽约束值根据第一关系式确定,所述第一关系式为pt=n×nd-n,pt为所述第一脉宽约束值,n为所述测量精度,nd为所述线束;
18、基于所述绝对值与所述第一脉宽约束值的比较结果确定所述编码器的参考位置点为所述第一位置点或所述第二位置点的过程包括:
19、当所述绝对值等于所述第一脉宽约束值,将所述第一位置点和所述第二位置点中的较大值确定为所述编码器的参考位置点。
20、可选的,获取所述编码器的线束的过程包括:
21、基于所述编码器的a信号确定所述编码器的线束;
22、或,从目标存储地址读取预置值作为所述编码器的线束。
23、可选的,所述预设脉宽约束值包括第二脉宽约束值;所述方法还包括:
24、获取所述第一位置点和所述第二位置点之间的实际位置距离值;
25、将所述实际位置距离值作为所述第二脉宽约束值;
26、基于所述绝对值与预设脉宽约束值的比较结果确定所述编码器的参考位置点为所述第一位置点或所述第二位置点的过程包括:
27、当所述绝对值和所述实际位置距离值相等,将所述第一位置点和所述第二位置点中的较小值确定为所述编码器的参考位置点。
28、可选的,获取所述第一位置点和所述第二位置点之间的实际位置距离值的过程包括:
29、获取多个第一位置点和多个第二位置点;
30、计算多个所述第一位置点和多个所述第二位置点的第一位置距离值;
31、在多个所述第一位置距离值中选择满足预设条件的多个第二位置距离值;
32、将多个所述第二位置距离值的平均值作为所述实际位置距离值。
33、为解决上述技术问题,本申请还提供了一种编码器的参考位置点确定系统,所述参考位置点确定系统包括:
34、获取模块,用于响应z信号的触发沿生成的中断信号,获取第一位置点和第二位置点;所述第一位置点和所述第二位置点为两个相邻的所述中断信号对应的位置点,所述触发沿包括上升沿和下降沿;
35、计算模块,用于获取所述第一位置点和所述第二位置点的差值的绝对值;
36、确定模块,用于基于所述绝对值与预设脉宽约束值的比较结果确定所述编码器的参考位置点为所述第一位置点或所述第二位置点。
37、为解决上述技术问题,本申请还提供了一种电子设备,包括:
38、存储器,用于存储计算机程序;
39、处理器,用于执行所述计算机程序时实现如上文任意一项所述的编码器的参考位置点确定方法的步骤。
40、为解决上述技术问题,本申请还提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如上文任意一项所述的编码器的参考位置点确定方法的步骤。
41、本申请提供一种编码器的参考位置点确定方法,基于z信号确定参考位置点时,将z信号的上升沿和下降沿均作为触发沿产生中断信号,以触发处理芯片响应,获取相邻的两个中断信号对应的第一位置点和第二位置点,以中断的形式触发无需处理器具备z信号的识别功能,降低对处理芯片的编码器接口外设的依赖,增加处理芯片的选择范围,降低成本,计算第一位置点和第二位置点的差值的绝对值后,再将绝对值和预设脉宽约束值进行比较,根据比较结果在第一位置点和第二位置点中选择编码器的参考位置点,无需区分编码器正转或反转,即可确定准确的参考位置点,处理逻辑简单高效,能够消除编码器正反转的参考位置点的偏差,提高最终位置的判断精度及速度值的计算精度。本申请还提供了一种编码器的参考位置点确定系统、电子设备以及计算机可读存储介质,具有和上述编码器的参考位置点确定方法相同的有益效果。
技术特征:
1.一种编码器的参考位置点确定方法,其特征在于,应用于处理芯片,所述参考位置点确定方法包括:
2.根据权利要求1所述的编码器的参考位置点确定方法,其特征在于,所述预设脉宽约束值包括第一脉宽约束值;所述方法还包括:
3.根据权利要求2所述的编码器的参考位置点确定方法,其特征在于,基于所述线束确定所述第一脉宽约束值的过程包括:
4.根据权利要求3所述的编码器的参考位置点确定方法,其特征在于,基于所述线束确定所述第一脉宽约束值的过程包括:
5.根据权利要求2所述的编码器的参考位置点确定方法,其特征在于,获取所述编码器的线束的过程包括:
6.根据权利要求1-5任意一项所述的编码器的参考位置点确定方法,其特征在于,所述预设脉宽约束值包括第二脉宽约束值;所述方法还包括:
7.根据权利要求6所述的编码器的参考位置点确定方法,其特征在于,获取所述第一位置点和所述第二位置点之间的实际位置距离值的过程包括:
8.一种编码器的参考位置点确定系统,其特征在于,所述参考位置点确定系统包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质上存储有计算机程序,所述计算机程序被处理器执行时实现如权利要求1-7任意一项所述的编码器的参考位置点确定方法的步骤。
技术总结
本发明公开了一种编码器的参考位置点确定方法、系统、设备及介质,涉及编码器领域,为解决编码器正转和反转读取的Z位置产生差异和抖动的问题,该方法包括响应Z信号的触发沿生成的中断信号,获取第一位置点和第二位置点;获取第一位置点和第二位置点的差值的绝对值;基于绝对值与预设脉宽约束值的比较结果确定编码器的参考位置点为第一位置点或第二位置点。本发明能够降低对处理芯片的编码器接口外设的依赖,增加处理芯片的选择范围,降低成本,无需区分编码器正转或反转,即可确定准确的参考位置点,处理逻辑简单高效,能够消除编码器正反转的参考位置点的偏差,提高最终位置的判断精度及速度值的计算精度。
技术研发人员:李鸥
受保护的技术使用者:长沙市英威腾电气技术有限公司
技术研发日:
技术公布日:2024/10/31
- 还没有人留言评论。精彩留言会获得点赞!