本申请涉及信息处理,特别是涉及一种导航方法及系统。
背景技术:
1、随着城市化进程的加速,人们对室内导航的需求急剧增加,特别是在商场、医院、机场和停车场等布局复杂室内环境中。尽管传统的全球定位系统(global positioningsystem,gps)和北斗导航系统,在室外环境中能够通过卫星信号提供精确导航,极大地方便了人们的出行,但这些系统在室内环境中却面临挑战。
2、当进入室内环境时,由于建筑物(如墙壁、天花板等)的遮挡、信号衰减以及室内多径效应等多种因素,gps信号和北斗信号往往变得微弱甚至完全无法被终端设备接收,导致室内导航服务的延迟或中断,从而无法满足人们对室内导航的迫切需求。
技术实现思路
1、基于上述问题,本申请提供了一种导航方法及系统,能够提高导航的准确性和可靠性。
2、本申请实施例公开了如下技术方案:
3、第一方面,本申请公开了一种导航方法,所述方法包括:
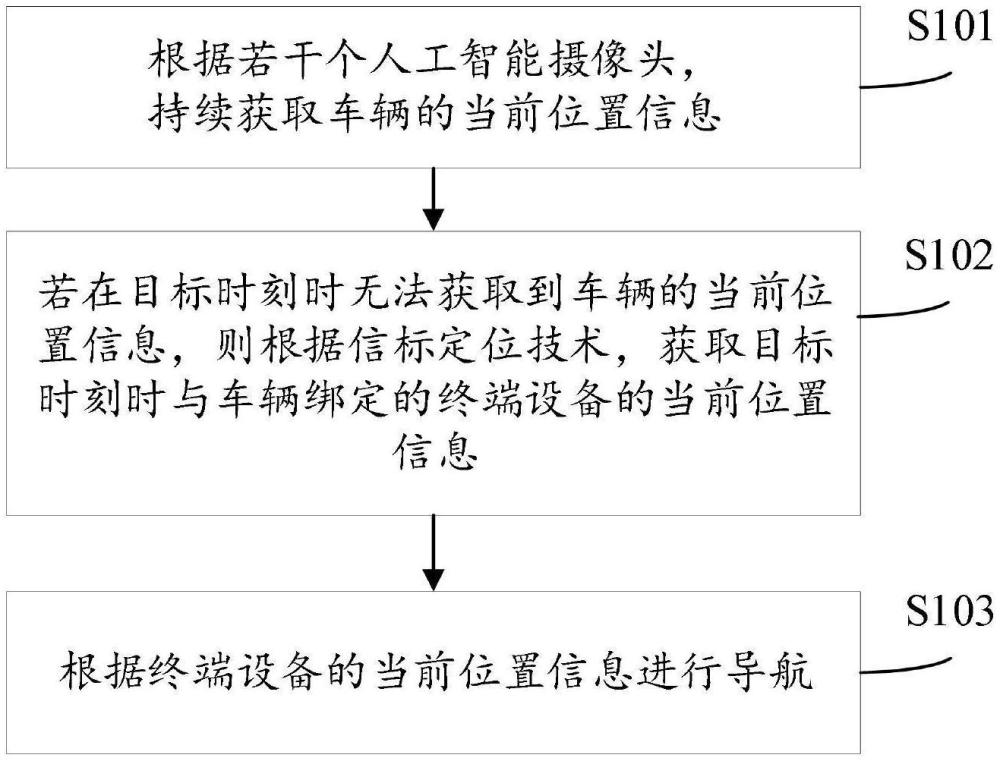
4、根据若干个人工智能摄像头,持续获取车辆的当前位置信息;
5、若在目标时刻时无法获取到所述车辆的当前位置信息,则根据信标定位技术,获取目标时刻时与所述车辆绑定的终端设备的当前位置信息;
6、根据所述终端设备的当前位置信息进行导航。
7、可选地,在执行所述根据若干个人工智能摄像头,持续获取车辆的当前位置信息之前,所述方法还包括:
8、当终端设备未与所述车辆绑定时,若所述终端设备的当前位置信息仅与所述车辆的当前位置信息之间的距离小于预设距离阈值,则将所述终端设备与所述车辆绑定。
9、可选地,在执行所述根据若干个人工智能摄像头,持续获取车辆的当前位置信息之前,所述方法还包括:
10、当终端设备未与所述车辆绑定时,若所述终端设备的当前位置信息所表征的位置区域的目标点仅与所述车辆的当前位置信息所表征的位置区域的目标点之间的距离小于预设距离阈值,则将所述终端设备与所述车辆绑定。
11、可选地,所述方法还包括:
12、若在目标时刻时能够获取到所述车辆的当前位置信息,则根据所述车辆的当前位置信息进行导航。
13、可选地,所述根据若干个人工智能摄像头,持续获取车辆的当前位置信息,包括:
14、获取车辆的车辆特征信息;
15、通过在若干个人工智能摄像头提供的车辆视频中基于重识别技术持续识别所述车辆特征信息,持续获取所述车辆的当前位置信息。
16、可选地,所述根据若干个人工智能摄像头,持续获取车辆的当前位置信息,包括:
17、根据激光雷达、惯性导航系统和轮速计中的至少一种和若干个人工智能摄像头,构建三维场景地图;
18、根据若干个人工智能摄像头,持续获取车辆的二维位置坐标;
19、将所述二维位置坐标映射至所述三维场景地图中,持续获取车辆的当前位置信息,所述当前位置信息为三维位置坐标。
20、第二方面,本申请公开了一种导航系统,终端设备和服务器;
21、所述服务器用于,根据若干个人工智能摄像头,持续获取车辆的当前位置信息;
22、所述服务器还用于,若在目标时刻时无法获取到所述车辆的当前位置信息,则根据信标定位技术,获取目标时刻时与所述车辆绑定的终端设备的当前位置信息;
23、所述服务器还用于,根据所述终端设备的当前位置信息进行导航。
24、可选地,所述服务器还用于,若在目标时刻时能够获取到所述车辆的当前位置信息,则根据所述车辆的当前位置信息进行导航。
25、第三方面,本申请公开了一种导航系统,所述系统包括:终端设备和服务器;
26、所述服务器用于,根据若干个人工智能摄像头,持续获取车辆的当前位置信息;
27、所述服务器还用于,向所述终端设备发送所述车辆的当前位置信息;
28、所述终端设备用于,若在目标时刻时无法获取到所述车辆的当前位置信息,则根据信标定位技术,获取目标时刻时与所述车辆绑定的终端设备的当前位置信息;
29、所述终端设备还用于,根据所述终端设备的当前位置信息进行导航。
30、可选地,所述终端设备还用于,若在目标时刻时能够获取到所述车辆的当前位置信息,则根据所述车辆的当前位置信息进行导航。
31、相较于现有技术,本申请具有以下有益效果:
32、本申请实施例提供了一种导航方法及系统,该方法利用若干个人工智能摄像头,基于视频定位技术持续获取车辆的当前位置信息,当在目标时刻时,视频定位技术因某些原因(如光线不足、摄像头故障等)无法获取车辆的当前位置信息,则自动切换到信标定位技术,通过与车辆绑定的终端设备进行定位,并根据终端设备的当前位置信息进行导航。由此,本申请实施例提供的导航方法将视频定位技术员和信标定位技术相结合,有效解决传统纯蓝牙定位等导航方法在室内定位的误差大、导航准确率低的问题,提升了室内导航的准确性和可靠性。
技术特征:1.一种导航方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,在执行所述根据若干个人工智能摄像头,持续获取车辆的当前位置信息之前,所述方法还包括:
3.根据权利要求1所述的方法,其特征在于,在执行所述根据若干个人工智能摄像头,持续获取车辆的当前位置信息之前,所述方法还包括:
4.根据权利要求1至3任一项所述的方法,其特征在于,所述方法还包括:
5.根据权利要求1所述的方法,其特征在于,所述根据若干个人工智能摄像头,持续获取车辆的当前位置信息,包括:
6.根据权利要求1所述的方法,其特征在于,所述根据若干个人工智能摄像头,持续获取车辆的当前位置信息,包括:
7.一种导航系统,其特征在于,所述系统包括:终端设备和服务器;
8.根据权利要求7所述的系统,其特征在于,所述服务器还用于,若在目标时刻时能够获取到所述车辆的当前位置信息,则根据所述车辆的当前位置信息进行导航。
9.一种导航系统,其特征在于,所述系统包括:终端设备和服务器;
10.根据权利要求7所述的系统,其特征在于,所述终端设备还用于,若在目标时刻时能够获取到所述车辆的当前位置信息,则根据所述车辆的当前位置信息进行导航。
技术总结本申请实施例提供了一种导航方法及系统,涉及信息处理技术领域。该方法利用若干个人工智能摄像头,基于视频定位技术持续获取车辆的当前位置信息,当在目标时刻时,视频定位技术因某些原因(如光线不足、摄像头故障等)无法获取车辆的当前位置信息,则自动切换到信标定位技术,通过与车辆绑定的终端设备进行定位,并根据终端设备的当前位置信息进行导航。由此,本申请实施例提供的导航方法将视频定位技术员和信标定位技术相结合,有效解决传统纯蓝牙定位等导航方法在室内定位的误差大、导航准确率低的问题,提升了室内导航的准确性和可靠性。
技术研发人员:青海
受保护的技术使用者:爱笔(北京)智能科技有限公司
技术研发日:技术公布日:2024/11/11