一种基于机器学习的三轴校准方法与流程
本发明属于三轴校准,具体是一种基于机器学习的三轴校准方法。
背景技术:
1、由于工艺和物理特性的影响,基于mems的加速度传感器天然存在零点偏移误差,而这些误差会随着温度、湿度和封装应力的变化而发生变化。在可穿戴设备中,如果不对这些误差进行校准,将会影响加速度测量的准确性,从而影响方向识别、计步、抬腕亮屏等多方面的使用体验。
2、传统的校准方法主要针对零点偏移误差,即将加速度传感器放置在水平平面上,分别使单轴垂直向上,查看该单轴的显示,通过这样的步骤,可以计算出三轴的零点偏移误差,完成对三轴的校准。然而,由于每个加速度传感器自身的误差都是独特的,这种方法需要在加速度传感器生产过程中对每个传感器的每个轴进行单独的校准,从而增加了生产成本。此外,由于加速度传感器的误差会随着温度、湿度和应力的变化而漂移,尤其是在高温回流焊焊接到产品pcb板上时,高温引起的传感器基板应力变化会导致零点偏移大幅漂移。传统的校准方法无法解决这些漂移问题。
3、利用外部设备进行传感器校准在某些情况下是有效的,但涉及高昂的成本和较为复杂的设备购买、安装和维护过程,校准过程还需要花费较长时间,可能受到环境因素的影响,导致在不同环境下的校准结果不一致。此外传感器性能可能会随着时间的推移、环境的变化或设备的磨损而发生变化,外部设备校准无法及时适应这些变化。
4、基于此,为了解决上述问题,本发明提供了一种基于机器学习的三轴校准方法,可以降低加速度传感器的生产成本并改善加速度传感器校准后的漂移问题,提高设备测量的准确性、稳定性和适应性。
技术实现思路
1、为了解决上述方案存在的问题,本发明提供了一种基于机器学习的三轴校准方法。
2、本发明的目的可以通过以下技术方案实现:
3、一种基于机器学习的三轴校准方法,方法包括:
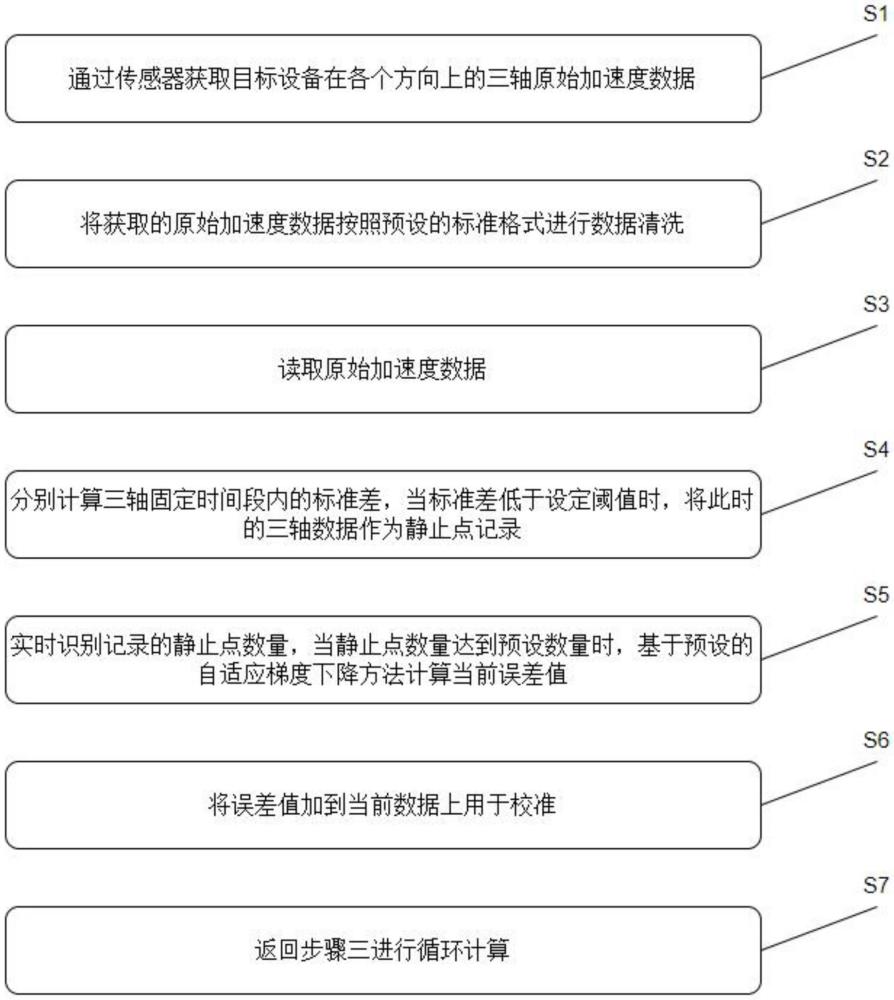
4、步骤一:通过传感器获取目标设备在各个方向上的三轴原始加速度数据;
5、步骤二:将获取的原始加速度数据按照预设的标准格式进行数据清洗;
6、步骤三:读取原始加速度数据;
7、步骤四:分别计算三轴固定时间段内的标准差,当标准差低于设定阈值时,将此时的三轴数据作为静止点记录;
8、步骤五:实时识别记录的静止点数量,当静止点数量达到预设数量时,基于预设的自适应梯度下降方法计算当前误差值;
9、步骤六:将误差值加到当前数据上用于校准;
10、步骤七:返回步骤三进行循环计算。
11、进一步地,步骤四中,每次计算数据量为:n=m×fs;
12、式中:n为计算数据量;m为秒数;fs为数据采集频率。
13、进一步地,静止点的确定方法为:
14、将每次读取的三轴数据标记为(x,y,z);
15、则经过时间m后的数据矩阵为
16、根据公式计算对应的标准差;
17、式中:std(a)为标准差;n为计算数据量;为数据矩阵平均值;
18、当标准差小于设定阈值时,将相应的三轴数据标记为静止点。
19、进一步地,校准后数据的确定方法包括:
20、将静止点对应的三轴数据标记为将静止点的预设数量标记为n;
21、当静止点数量达到n时,设置3×n矩阵,为:b=(b1,b2,…,bn-1,bn);
22、设置校准矩阵为θ3×1,则预测函数为:
23、
24、进而设置损失函数:
25、式中:(θ1,θ2,θ3)为三轴加速度校准值,g为重力加速度映射值1000;
26、则校准矩阵为:θ=θ-η.j'(θ1,θ2,θ3);
27、式中:j′(θ1,θ2,θ3)为梯度,η为学习率;
28、对θ1求导得:
29、
30、预测函数对θ1求导得:
31、
32、
33、则损失函数求导化简为:
34、
35、同理可得:
36、
37、即:
38、
39、更新后校准矩阵为:θ=θ-η.(b+θ).y;
40、传出校准后数据:a'=b+θ。
41、进一步地,设定阈值的设置方法包括:
42、获取目标设备信息,根据目标设备信息获取目标设备的工作环境数据;将工作环境数据拆分为若干个环境单元;并设置各环境单元的单元比重值;
43、设置各环境因素,根据各环境因素对各环境单元进行特征提取,获得各环境单元对应的影响特征数据;根据各影响特征数据对各环境单元进行合并,获得各环境分类;根据环境分类对应的各环境单元的单元比重值计算分类比重值;
44、将各环境分类进行排序,获得第一序列,并将各环境分类对应的分类比重值标记在第一序列中;
45、设置精度要求;识别目标设备对应的定位环境;
46、根据精度要求、定位环境和第一序列确定基准环境分类,根据基准环境分类确定设定阈值。
47、进一步地,根据各影响特征数据对各环境单元进行合并的方法包括:
48、建立影响评估模型,影响评估模型的表达式为:
49、
50、式中:s为输入数据,输入数据为进行比较的影响特征数据;输出数据为影响评估值yp(s);
51、通过影响评估模型对各影响特征数据进行评估,获得各影响特征数据之间的影响评估值;根据各影响评估值对各环境单元进行合并,获得各环境分类。
52、一种基于机器学习的三轴校准装置,包括:
53、存储器,用于存储计算机程序;
54、处理器,用于执行计算机程序时实现一种基于机器学习的三轴校准方法。
55、与现有技术相比,本发明的有益效果是:
56、提高传感器精度:通过消除传感器误差,包括零偏、比例误差和非正交误差,显著提高了传感器的精度,使其能够更准确地测量加速度。
57、适应性强:无论是手表在不同姿态下的佩戴,还是设备在复杂的动态环境中的应用,都能够更好地适应,提高可靠性。
58、实时校准:能够动态地对传感器进行调整,适应长时间使用、环境变化或传感器性能漂移等情况,保持系统的准确性。
59、系统稳定性提高:使传感器输出的数据更为稳定,减小了由于传感器误差引起的测量不稳定性,增强了整个系统的可靠性。
60、降低用户依赖:用户不再需要过于精细的设备佩戴或特定的使用姿势,提高了用户体验和便利性。
技术特征:
1.一种基于机器学习的三轴校准方法,其特征在于,方法包括:
2.根据权利要求1所述的一种基于机器学习的三轴校准方法,其特征在于,步骤四中,每次计算数据量为:n=m×fs;
3.根据权利要求1所述的一种基于机器学习的三轴校准方法,其特征在于,静止点的确定方法为:
4.根据权利要求1所述的一种基于机器学习的三轴校准方法,其特征在于,校准后数据的确定方法包括:
5.根据权利要求1所述的一种基于机器学习的三轴校准方法,其特征在于,设定阈值的设置方法包括:
6.根据权利要求5所述的一种基于机器学习的三轴校准方法,其特征在于,根据各影响特征数据对各环境单元进行合并的方法包括:
7.根据权利要求6所述的一种基于机器学习的三轴校准方法,其特征在于,影响评估模型的表达式为:
8.一种基于机器学习的三轴校准装置,其特征在于,包括:
技术总结
本发明公开了一种基于机器学习的三轴校准方法,属于三轴校准技术领域,方法包括:步骤一:通过传感器获取目标设备在各个方向上的三轴原始加速度数据;步骤二:将获取的原始加速度数据按照预设的标准格式进行数据清洗;步骤三:读取原始加速度数据;步骤四:分别计算三轴固定时间段内的标准差,当标准差低于设定阈值时,将此时的三轴数据作为静止点记录;步骤五:实时识别记录的静止点数量,当静止点数量达到预设数量时,基于预设的自适应梯度下降方法计算当前误差值;步骤六:将误差值加到当前数据上用于校准;步骤七:返回步骤三进行循环计算;通过消除传感器误差,包括零偏、比例误差和非正交误差,显著提高了传感器的精度。
技术研发人员:孙春林,袁俊康,张文
受保护的技术使用者:重庆舟海智能科技股份有限公司
技术研发日:
技术公布日:2024/11/14
- 还没有人留言评论。精彩留言会获得点赞!