一种多用途水下定位装置及方法与流程
本发明涉及水下试验装置,尤其涉及一种多用途水下定位装置及方法。
背景技术:
1、水下定位装置在水下海洋数据采集、海洋矿产资源开发、海底地形地貌测绘等科学活动中发挥着至关重要的作用,是世界各国研究工作的热点。在海洋测绘或者做相关的海洋实验中,通过将水下无人实验装置置于相关的位置,当达到一定的时间之后就会控制无人实验装置上浮进行回收,虽然水下无人实验装置上设置有定位器,但是定位器在水下传输信息时常常会发生异常,不利于装置的回收,而且在海域中实验时,由于浮力的存在,上升或者下沉时不易控制,容易侧翻。
技术实现思路
1、本发明克服了现有技术的不足,提供了一种多用途水下定位装置及方法。
2、为达上述目的,本发明采用的技术方案为:
3、本发明第一方面提供了一种多用途水下定位装置,包括:
4、箱体以及浮力计算仪,所述箱体的内部设置有中空结构,在所述中空结构内设置有至少两个浮球,其中,通过所述浮力计算仪获取所述定位装置的浮力数据;
5、箱体两侧的定位仪,并通过所述箱体两侧的定位仪,通过所述箱体两侧的定位仪获取箱体两侧的定位信息,并根据所述箱体两侧的定位信息以及所述定位装置的浮力数据动态调整所述浮球内的体积量。
6、进一步的,在本装置中,所述箱体上还设置有调节机构,通过所述调节机构调节所述浮球的位置。
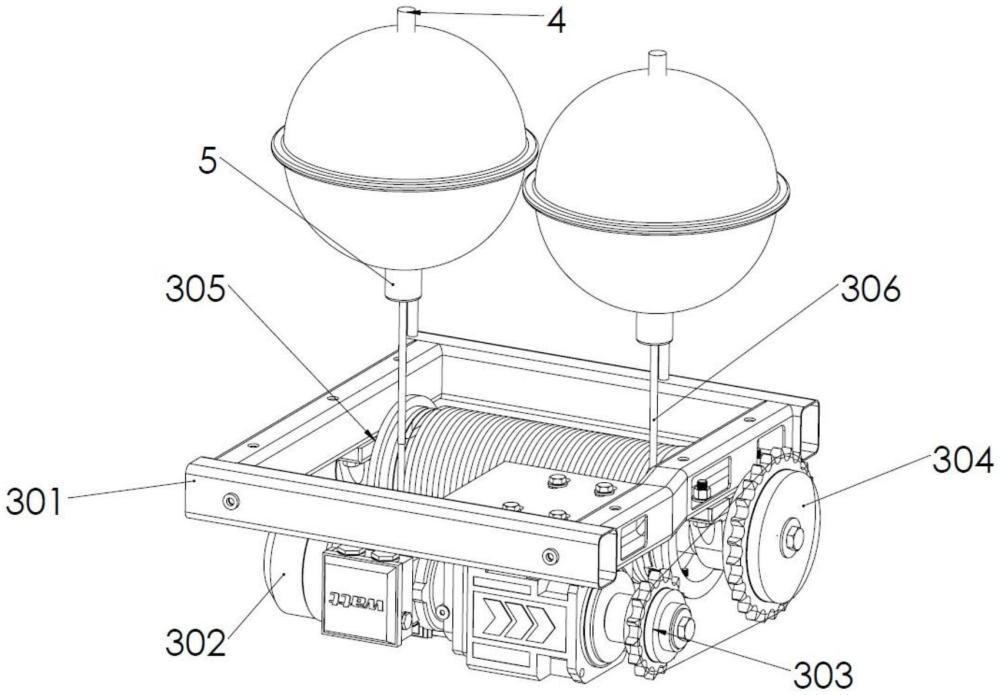
7、进一步的,在本装置中,所述调节机构包括第一支架,所述第一支架上安装有驱动电机,所述驱动电机的输出端与第一链轮连接,所述第一链轮通过链条驱动第二链轮,所述第二链轮与卷绳轮连接。
8、进一步的,在本装置中,所述卷绳轮上设置有若干卷绳,其中,所述卷绳与浮球固定连接。
9、进一步的,在本装置中,所述浮球的顶部上安装有第一阀门,底部上安装有第二阀门,且所述第二阀门与气泵连接。
10、进一步的,在本装置中,通过对所述箱体两侧的定位信息进行判定,获取定位装置在下沉时的姿态信息,并基于所述定位装置在下沉时的姿态信息对浮球内的水体积量进行动态调整。
11、本发明第二方面提供了一种多用途水下定位装置的控制方法,应用于任一项所述的多用途水下定位装置,具体包括以下步骤:
12、获取各海水环境特征数据之下海水密度数据,并构建数据库,将所述各海水环境特征数据之下海水密度数据输入到所述数据库中进行存储,并获取目标水域中的海水环境特征数据;
13、将所述目标水域中的海水环境特征数据输入到所述数据库中进行数据查询,获取当前目标水域中的海水环境特征数据之下的海水密度数据,获取多用途水下定位装置的体积数据信息以及多用途水下定位装置的重力数据;
14、基于所述多用途水下定位装置的体积数据信息以及目标水域中的海水环境特征数据计算出多用途水下定位装置在当前目标水域所受到的浮力数据;
15、基于所述多用途水下定位装置的重力数据以及多用途水下定位装置在当前目标水域所受到的浮力数据计算出多用途水下定位装置在上升以及下沉时的浮力数据,并按照所述多用途水下定位装置在上升以及下沉时的浮力数据控制浮球内的水体积量。
16、进一步的,所述的多用途水下定位装置的控制方法,还包括以下步骤:
17、初始化浮球内的水体积量,并按照所述浮球内的水体积量控制浮球,通过定位仪获取多用途水下定位装置左右两侧的定位信息,并通过对所述多用途水下定位装置左右两侧的定位信息进行分析,获取多用途水下定位装置左右两侧的定位信息之间的高度差值;
18、预设高度差阈值评价指标,并判断所述多用途水下定位装置左右两侧的定位信息之间的高度差值是否大于所述高度差阈值评价指标;
19、当所述多用途水下定位装置左右两侧的定位信息之间的高度差值大于所述高度差阈值评价指标时,调整浮球内的水体积量,直至多用途水下定位装置左右两侧的定位信息之间的高度差值不大于所述高度差阈值评价指标;
20、当多用途水下定位装置左右两侧的定位信息之间的高度差值不大于所述高度差阈值评价指标时,则按照当前浮球内的水体积量控制所述浮球上升或者下沉。
21、进一步的,所述的多用途水下定位装置的控制方法,还包括以下步骤:
22、通过多用途水下定位装置回收终端获取目标水域中的图像数据信息,并通过对所述目标水域中的图像数据信息进行识别,判断所述图像数据信息是否存在浮球;
23、当存在浮球时,获取浮球所在的位置,并获取所述多用途水下定位装置回收终端所在的位置,并基于所述浮球所在的位置以及所述多用途水下定位装置回收终端所在的位置通过路径规划算法规划出一条最优的行驶路线;
24、所述多用途水下定位装置回收终端按照所述最优的行驶路线进行行驶,并通过对所述多用途水下定位装置回收终端对浮球进行回收。
25、进一步的,所述的多用途水下定位装置的控制方法,通过遥感技术获取目标水域中的图像数据信息,具体包括以下步骤:
26、通过在多用途水下定位装置设置通讯设备,获取多用途水下定位装置与多用途水下定位装置回收终端之间的信息传输质量,并设置信息传输质量阈值,判断所述多用途水下定位装置与多用途水下定位装置回收终端之间的信息传输质量是否大于信息传输质量阈值;
27、当所述多用途水下定位装置与多用途水下定位装置回收终端之间的信息传输质量大于信息传输质量阈值时,获取多用途水下定位装置的实时地理位置信息以及多用途水下定位装置回收终端的地理位置信息;
28、根据多用途水下定位装置的实时地理位置信息以及多用途水下定位装置回收终端的地理位置信息规划多用途水下定位装置回收终端的行驶路径对多用途水下定位装置进行回收;
29、当所述多用途水下定位装置与多用途水下定位装置回收终端之间的信息传输质量不大于信息传输质量阈值,则预测多用途水下定位装置上升至海平面时的预估区域位置,并作为目标区域,通过遥感技术获取目标水域中的图像数据信息。
30、本发明解决了背景技术中存在的缺陷,本发明具备以下有益效果:
31、本发明通过设置多个浮球,能够根据海域中的密度数据进行调控浮球内部的水体积量,从而能够控制整个装置能够上升或者下沉,而且能够根据整个装置的稳定性进行动态调控,能够防止整个装置侧翻,让整体装置能够安装预定的姿态在海域中进行试验。
技术特征:
1.一种多用途水下定位装置,其特征在于,包括:
2.根据权利要求1所述的一种多用途水下定位装置,其特征在于,所述箱体上还设置有调节机构,通过所述调节机构调节所述浮球的位置。
3.根据权利要求2所述的一种多用途水下定位装置,其特征在于,所述调节机构包括第一支架,所述第一支架上安装有驱动电机,所述驱动电机的输出端与第一链轮连接,所述第一链轮通过链条驱动第二链轮,所述第二链轮与卷绳轮连接。
4.根据权利要求3所述的一种多用途水下定位装置,其特征在于,所述卷绳轮上设置有若干卷绳,其中,所述卷绳与浮球固定连接。
5.根据权利要求1所述的一种多用途水下定位装置,其特征在于,所述浮球的顶部上安装有第一阀门,底部上安装有第二阀门,且所述第二阀门与气泵连接。
6.根据权利要求1所述的一种多用途水下定位装置,其特征在于,通过对所述箱体两侧的定位信息进行判定,获取定位装置在下沉时的姿态信息,并基于所述定位装置在下沉时的姿态信息对浮球内的水体积量进行动态调整。
7.一种多用途水下定位装置的控制方法,其特征在于,应用于权利要求1-6任一项所述的多用途水下定位装置,具体包括以下步骤:
8.根据权利要求7所述的一种多用途水下定位装置的控制方法,其特征在于,还包括以下步骤:
9.根据权利要求7所述的一种多用途水下定位装置的控制方法,其特征在于,还包括以下步骤:
10.根据权利要求9所述的一种多用途水下定位装置的控制方法,其特征在于,通过遥感技术获取目标水域中的图像数据信息,具体包括以下步骤:
技术总结
本发明涉及一种多用途水下定位装置及方法,属于水下试验装置技术领域,包括:箱体以及浮力计算仪,箱体的内部设置有中空结构,在所述中空结构内设置有至少两个浮球,其中,通过浮力计算仪获取定位装置的浮力数据;箱体两侧的定位仪,并通过箱体两侧的定位仪,通过箱体两侧的定位仪获取箱体两侧的定位信息,并根据箱体两侧的定位信息以及所述定位装置的浮力数据动态调整所述浮球内的体积量。本发明通过设置多个浮球,能够根据海域中的密度数据进行调控浮球内部的水体积量,从而能够控制整个装置能够上升或者下沉,而且能够根据整个装置的稳定性进行动态调控,能够防止整个装置侧翻,让整体装置能够安装预定的姿态在海域中进行试验。
技术研发人员:田斐,贾春斌,黄浦江,唐振朝,陈海刚,陈丕茂,熊倩,张林宝,张喆
受保护的技术使用者:中国水产科学研究院南海水产研究所
技术研发日:
技术公布日:2024/11/14
- 还没有人留言评论。精彩留言会获得点赞!