胶轮车外侧最小转弯半径测量系统及测量方法
本发明属于测量领域,具体涉及对胶轮车外侧最小转弯半径的测量。
背景技术:
1、胶轮车具有速度快、爬坡能力强、安全灵活等优点,已经成为井工煤矿重要的辅助运输工具。但是煤矿井巷空间狭小,无轨辅助运输线路弯多路窄,特殊、恶劣的工况对胶轮车的行驶平稳性、通过性提出了严格的要求。最小转弯半径是衡量胶轮车在矿井巷道内通过性能及行驶安全性的重要参数。
2、长期服役过程中,胶轮车的转向性能、传动性能,以及轮胎与路面之间的附着特性显著变化,难以通过理论研究准确获得在役胶轮车的最小转弯半径。但是,现有的测量方法中,由于测量数据的采集、处理均以人工为主,测量效率低、精度低是该方法的显著不足,极易影响准确评价胶轮车的行驶平稳性与安全通行性能。
技术实现思路
1、本发明基于坐标变换原理,提供一种胶轮车外侧最小转弯半径测量系统及测量方法,为合理、高效评价胶轮车的行驶平稳性与安全通行性能提供依据。
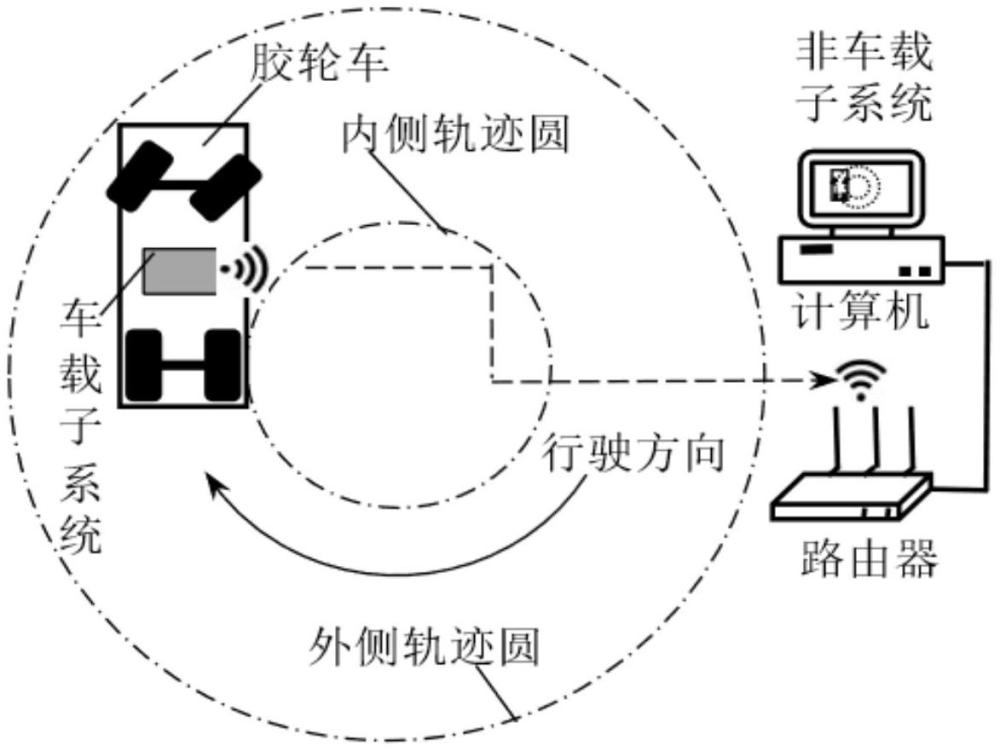
2、本发明的技术方案是,一种胶轮车外侧最小转弯半径测量系统,其特征是由车载子系统及非车载子系统两部分组成,其中非车载子系统由计算机与路由器组成,两者通过以太网线连接;车载子系统为箱式结构,包括箱体,箱体与磁性吸盘固定连接,箱体内设有电源、可编程逻辑控制器plc及网关;
3、加速度传感器a、加速度传感器b安装于箱体顶板的上表面,速度传感器a、速度传感器b安装于箱体顶板的下表面,加速度传感器a、加速度传感器b分别与速度传感器a、速度传感器b在箱体顶板的上表面与下表面对应安装;
4、电源为可编程逻辑控制器plc、网关,以及加速度传感器a、加速度传感器b、速度速度传感器a、速度传感器b供电;可编程逻辑控制器plc与网关通过以太网线连接;电源、可编程逻辑控制器plc及网关与箱体固定连接,前板通过螺纹连接零件与箱体连接;
5、测量前,首先沿车载子系统中两个三轴加速度传感器的正交测量方向,分别建立坐标系o1-x1y1z1及o2-x2y2z2;并对测量坐标系o1-x1y1及o2-x2y2进行标定,获得两个测量坐标系之间的旋转量与平移量;
6、测量时,将车载子系统放置于车厢上,转动扳手将磁性吸盘吸附于车厢上;加速度传感器a、加速度传感器b、速度传感器a、速度传感器b采集胶轮车上不同位置处的加速度、速度信号,可编程逻辑控制器plc采集来自加速度传感器a、加速度传感器b、速度传感器a、速度传感器b的加速度、速度信号,经网关及路由器传输至计算机,由计算机对测量数据解算后,获得胶轮车外侧最小转弯半径。
7、一种胶轮车外侧最小转弯半径测量方法,其特征是,
8、采用上述胶轮车外侧最小转弯半径测量系统,获得胶轮车两点o1及o2在t时刻的加速度a1、a2以及速率v1、v2;
9、求取加速度a1、a2的矢量所在直线在测量坐标系o2-x2y2中的方程;
10、求取法向加速度a1n、a2n的矢量所在直线在测量坐标系o2-x2y2中的方程;
11、求取法向加速度a1n、a2n的矢量所在直线的交点即,车辆的转动中心o点在测量坐标系o2-x2y2的坐标;
12、求取车辆前部最外侧角点ok与车辆的转动中心o点的距离,获得胶轮车外侧最小转弯半径。
13、本发明具有以下有益效果
14、本发明可以实现测量数据的自动采集、传输与处理,有利于提高测量精度与测量效率,有利于合理、高效评价胶轮车在巷道内的行驶平稳性与安全通过性。
技术特征:
1.胶轮车外侧最小转弯半径测量系统,其特征是由车载子系统及非车载子系统两部分组成,其中非车载子系统由计算机(1)与路由器(2)组成,两者通过以太网线连接;车载子系统为箱式结构,包括箱体(7),箱体(7)与磁性吸盘(9)固定连接,箱体(7)内设有电源(10)、可编程逻辑控制器plc(11)及网关(12);
2.如权利要求1所述的胶轮车外侧最小转弯半径测量系统,其特征是,对测量坐标系o1-x1y1及o2-x2y2进行标定的具体方法如下:
3.一种胶轮车外侧最小转弯半径测量方法,其特征是,
4.如权利要求3所述的一种胶轮车外侧最小转弯半径测量方法,其特征是,求取加速度a1、a2的矢量所在直线在测量坐标系o2-x2y2的方程的具体方法如下:
5.如权利要求4所述的一种胶轮车外侧最小转弯半径测量方法,其特征是,求取法向加速度a1n的矢量所在直线在测量坐标系o2-x2y2的方程的具体方法如下:
6.如权利要求5所述的一种胶轮车外侧最小转弯半径测量方法,其特征是,求取法向加速度a2n的矢量所在直线在测量坐标系o2-x2y2的方程的具体方法如下:
7.如权利要求6所述的一种胶轮车外侧最小转弯半径测量方法,其特征是,求取法向加速度a1n、a2n的矢量所在直线的交点在测量坐标系o2-x2y2的坐标的具体方法如下;
8.如权利要求7所述的一种胶轮车外侧最小转弯半径测量方法,其特征是,求取车辆前部最外侧角点ok与车辆转动中心o点的距离,获得胶轮车外侧最小转弯半径的具体方法如下:
技术总结
本发明公开了一种胶轮车外侧最小转弯半径测量系统及测量方法,由车载子系统及非车载子系统两部分组成,非车载子系统由计算机与路由器组成;车载子系统为箱式结构,包括箱体,箱体顶板上下表面对应固定两个加速度传感器和两个速度传感器,箱体内设有电源、可编程逻辑控制器PLC及网关。测量时,将车载子系统固定于车厢上,两个加速度传感器和两个速度传感器采集胶轮车上不同位置处的加速度、速度信号,所采集信号由可编程逻辑控制器PLC、网关及路由器传输至计算机,由计算机对测量数据解算后,获得胶轮车外侧最小转弯半径。本发明有利于提高测量精度与测量效率,为合理、高效评价胶轮车的行驶平稳性与安全通行性能提供依据。
技术研发人员:贺文海,石陇鹏,董欣荣
受保护的技术使用者:西安科技大学
技术研发日:
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!