一种基于北斗PPP-B2b服务的实时精密单点定位算法的误差分析方法与流程
本发明涉及一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法,适用于卫星导航定位。
背景技术:
1、全球导航卫星系统(gnss)领域,精密单点定位(precise point positioning,ppp)技术以其卓越的定位精度和广泛的应用前景,成为研究的热点。北斗卫星导航系统(beidou navigation satellite system, bds)作为全球四大卫星导航系统之一,其最新升级的北斗三号(beidou-3)系统,特别提供了ppp-b2b服务,进一步推动了ppp技术的发展。ppp-b2b服务通过卫星播发精密的轨道和钟差改正信息,使得用户能够实现实时的毫米级甚至厘米级定位精度。这项服务对于测绘、导航、地球物理研究等高精度位置服务领域具有重要意义。然而,为了充分利用ppp-b2b服务的性能,必须对可能影响定位精度的多种误差源进行深入分析和精确校正。误差源主要包括卫星轨道误差、卫星钟差、信号传播误差(如对流层和电离层延迟)、多路径效应以及接收机噪声等。这些误差源的准确估计和校正对于提高ppp定位结果的可靠性和精度至关重要。传统的ppp算法已经能够处理部分误差,但对于北斗ppp-b2b服务,需要进一步优化算法以适应其独特的信号特性和改正信息格式。
2、实时精密单点定位算法的误差分析方法,旨在通过先进的数据处理技术,实时动态定位策略,对观测数据进行处理,以减少误差的影响。
技术实现思路
1、本发明的目的,是为了减少北斗ppp-b2b服务的实时精密单点定位算法的误差,因此,提出了一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法,
2、本发明的目的可以通过采取如下技术方案达到:
3、所述的一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法的步骤为:
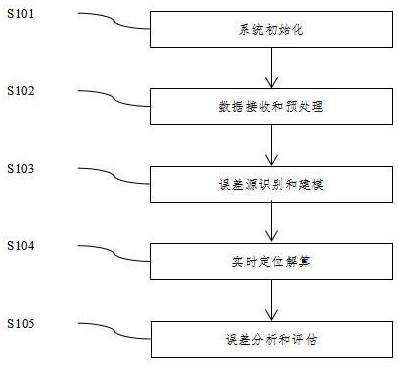
4、s101,系统初始化;
5、所述系统初始化,包括启动和配置接收机,启用ppp-b2b服务,确保能够接收实时的精密轨道和钟差改正数据信息,初始化定位解算器,并设置解算器的初始状态和初始参数;
6、s102,数据接收和预处理;
7、所述数据接收和预处理,包括接收北斗卫星的观测数据,所述观测数据包括伪距、载波相位和多普勒频移观测值,同时接收ppp-b2b服务提供的轨道和钟差改正信息,对所述观测数据进行预处理,所述预处理包括去除粗差处理、滤波处理和插值处理;
8、s103,误差源识别和建模:
9、所述误差源识别和建模,包括识别影响精密单点定位精度的误差源,包括卫星轨道误差、钟差误差、电离层延迟、对流层延迟;
10、所述误差源识别和建模,还包括建立误差模型,使用ppp-b2b服务提供的改正数对轨道误差和钟差误差进行修正;
11、所述误差源识别和建模,还包括应用电离层模型和对流层模型对相应的延迟误差进行修正;
12、s104,实时定位解算;
13、所述实时定位解算,包括根据接收的观测数据和改正信息,使用ppp算法进行实时定位解算,采用滤波算法对定位结果进行平滑和优化,提高定位精度,实时更新定位结果,并监控解算过程中的误差变化;
14、s105,误差分析和评估;
15、所述误差分析和评估,包括记录解算过程中各误差源的修正量和残差,分析各误差源对最终定位结果的影响,通过对比不同时间和空间条件下的定位结果,评估误差模型的准确性和稳定性;
16、所述误差分析和评估,还包括统计定位结果的误差值和误差分布,计算定位精度指标,并与预期精度进行对比,获得对比结果,根据对比结果对误差情况进行评估。
17、进一步的,上述s102中,所述去除粗差处理的方法采用多余观测值去除法,所述多余观测值去除法步骤为:a)收集一段时间内多个卫星的观测数据,b)比较不同卫星的观测值差异,c)设定阈值[d-,d+],如果差异超过阈值[d-,d+]则进行剔除,所述阈值[d-,d+]的计算公式为式(1),
18、 (1)
19、式中,μ为一段时间卫星观测数据的差异的均值,σ为一段时间卫星观测数据的差异的标准差,k为常数,取值为3或5。
20、进一步的,上述s102中,所述滤波处理采用低通滤波的方法以去除高频噪音。
21、进一步的,上述s102中,所述插值处理采用样条插值法,所述样条插值法的步骤为:a)收集一段时间内的观测数据,b)选择插值节点,c)构建样条方程,采用三次样条插值函数,所述三次样条插值函数采用固定端点斜率三次样条插值函数,d)求解样条系数,通过求解线性方程组,确定所述三次样条插值函数的不确定系数,得到完整的三次样条插值函数方程式,e)插值计算,使用获得的完整的三次样条插值函数方程式对缺失的数据点进行插值计算。
22、进一步的,上述s104中,所述滤波算法采用卡尔曼滤波算法。
23、进一步的,上述s105中,所述计算定位精度指标的方法步骤为:a)根据所述统计定位结果的误差值和误差分布,计算误差值的标准差和中位数,b)所述误差值的标准差大于所述误差值的中位数的2倍则表明存在较大的异常,采用均方根误差作为定位精度指标的计算方法,c)如果所述误差值的标准差小于等于所述误差值的中位数的2倍则表明不存在较大的误差,采用平均绝对误差作为定位精度指标的计算方法。
24、进一步的,上述s105中,所述根据对比结果对误差情况进行评估的步骤为:a)获得定位精度指标计算结果r1,和预期精度r2,b)如果r1<0.1r2则评估结果为误差模型表现良好,如果0.1r2≤r1≤r2,则评估结果为误差模型表现一般,如果r1>r2,则评估结果为误差模型表现较差,需要进一步分析误差源以改进。
技术特征:
1.一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法,其特征在于,所述的一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法的步骤为:
2.根据权利要求1所述的一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法,其特征在于,所述2)中所述去除粗差处理的方法采用多余观测值去除法,所述多余观测值去除法步骤为:a)收集一段时间内多个卫星的观测数据,b)比较不同卫星的观测值差异,c)设定阈值[d-,d+],如果差异超过阈值[d-,d+]则进行剔除,所述阈值[d-,d+]的计算公式为式(1),
3.根据权利要求1所述的一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法,其特征在于,所述2)中所述滤波处理采用低通滤波的方法以去除高频噪音。
4.根据权利要求1所述的一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法,其特征在于,所述2)中所述插值处理采用样条插值法,所述样条插值法的步骤为:a)收集一段时间内的观测数据,b)选择插值节点,c)构建样条方程,采用三次样条插值函数,所述三次样条插值函数采用固定端点斜率三次样条插值函数,d)求解样条系数,通过求解线性方程组,确定所述三次样条插值函数的不确定系数,得到完整的三次样条插值函数方程式,e)插值计算,使用获得的完整的三次样条插值函数方程式对缺失的数据点进行插值计算。
5.根据权利要求1所述的一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法,其特征在于,所述4)中所述滤波算法采用卡尔曼滤波算法。
6.根据权利要求1所述的一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法,其特征在于,所述5)中所述计算定位精度指标的方法步骤为:a)根据所述统计定位结果的误差值和误差分布,计算误差值的标准差和中位数,b)所述误差值的标准差大于所述误差值的中位数的2倍则表明存在较大的异常,采用均方根误差作为定位精度指标的计算方法,c)如果所述误差值的标准差小于等于所述误差值的中位数的2倍则表明不存在较大的误差,采用平均绝对误差作为定位精度指标的计算方法。
7.根据权利要求1所述的一种基于北斗ppp-b2b服务的实时精密单点定位算法的误差分析方法,其特征在于,所述5)中所述根据对比结果对误差情况进行评估的步骤为:a)获得定位精度指标计算结果r1,和预期精度r2,b)如果r1<0.1r2则评估结果为误差模型表现良好,如果0.1r2≤r1≤r2,则评估结果为误差模型表现一般,如果r1>r2,则评估结果为误差模型表现较差,需要进一步分析误差源以改进。
技术总结
本发明提供了一种基于北斗PPP‑B2b服务的实时精密单点定位算法的误差分析方法,包括系统初始化、数据接收和预处理、误差源识别和建模、实时定位结算和误差分析和评估,具有较高的定位准确性,可广泛的应用于卫星导航定位技术领域。
技术研发人员:李炜,黄幼明,漫犟斌,叶桂河,黄悦斌,曾祥峰,谢璇,柴冠军,郑文进,柯彦
受保护的技术使用者:中交华南勘察测绘科技有限公司
技术研发日:
技术公布日:2024/9/2
- 还没有人留言评论。精彩留言会获得点赞!