一种盾构机盾尾间隙测量方法、装置、设备及介质
本申请涉及盾尾间隙测量,特别是涉及一种盾构机盾尾间隙测量方法、装置、设备及介质。
背景技术:
1、盾构机广泛应用于地铁建设以及穿山隧道建设中,盾尾间隙即为管片外壁和盾尾内壁(即盾构机尾部内壁)之间的间隙。若想要盾构机向前掘进,盾尾内壁就不能与管片外壁相接触,因此,盾尾间隙是盾构机的重要参数。在盾构机施工过程中,对盾尾间隙这一参数进行快速、精确测量,是盾构机安全施工的前提。
2、在盾尾间隙测量的实际工程应用中,现有的接触式测量方法损耗快、安装繁琐,现有的非接触式测量方法精度低、速度慢。基于此,设计一种能够避免光源干扰的高效准确的盾尾间隙测量方法,对于盾构机的自动化发展和盾构机的工程安全有重要意义。
技术实现思路
1、本申请的目的是提供一种盾构机盾尾间隙测量方法、装置、设备及介质,可实现盾构机盾尾间隙的高效准确测量。
2、为实现上述目的,本申请提供了如下方案:
3、第一方面,本申请提供了一种盾构机盾尾间隙测量方法,所述盾构机盾尾间隙测量方法包括:
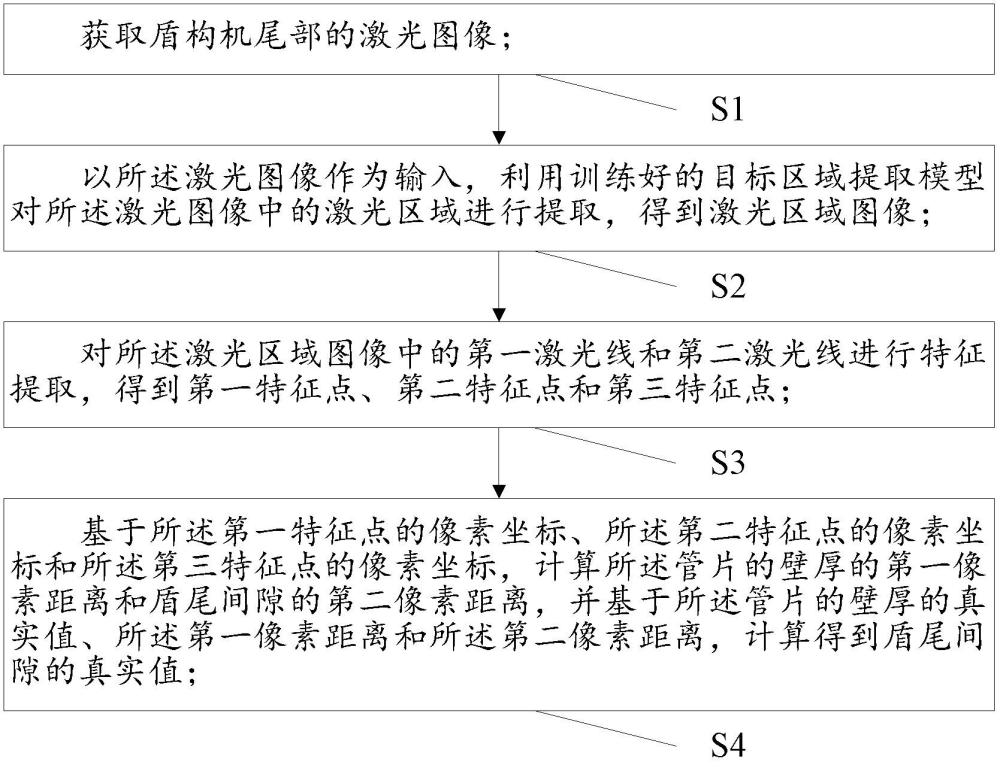
4、获取盾构机尾部的激光图像;所述激光图像包括激光区域,所述激光区域包括第一激光线和第二激光线,所述第一激光线是由盾构机头部向盾构机尾部发射激光时,照射在盾构机尾部的管片的端面上的激光线,所述第二激光线是由盾构机头部向盾构机尾部发射激光时,照射在盾构机尾部内壁上的激光线;
5、以所述激光图像作为输入,利用训练好的目标区域提取模型对所述激光图像中的激光区域进行提取,得到激光区域图像;所述训练好的目标区域提取模型采用改进后的yolov8模型,所述改进后的yolov8模型是对yolov8模型进行改进所得到的,改进包括:将yolov8模型的特征提取器的c2f模块中的卷积结构替换为双重卷积结构,在yolov8模型的特征提取器的中间c2f模块之前增加注意力机制层,去除yolov8模型的目标检测器的小目标检测器和中目标检测器;所述中间c2f模块为yolov8模型的特征提取器中除第一个c2f模块和最后一个c2f模块之外的c2f模块;
6、对所述激光区域图像中的第一激光线和第二激光线进行特征提取,得到第一特征点、第二特征点和第三特征点;所述第一特征点为所述第一激光线的一个端点;所述第二特征点为所述第一激光线的另一个端点;所述第三特征点为所述第一激光线和所述第二激光线的交点;
7、基于所述第一特征点的像素坐标、所述第二特征点的像素坐标和所述第三特征点的像素坐标,计算所述管片的壁厚的第一像素距离和盾尾间隙的第二像素距离,并基于所述管片的壁厚的真实值、所述第一像素距离和所述第二像素距离,计算得到盾尾间隙的真实值;所述盾尾间隙为所述管片的外壁与所述盾构机尾部内壁之间的距离。
8、第二方面,本申请提供了一种盾构机盾尾间隙测量装置,所述盾构机盾尾间隙测量装置包括:
9、图像获取模块,用于获取盾构机尾部的激光图像;所述激光图像包括激光区域,所述激光区域包括第一激光线和第二激光线,所述第一激光线是由盾构机头部向盾构机尾部发射激光时,照射在盾构机尾部的管片的端面上的激光线,所述第二激光线是由盾构机头部向盾构机尾部发射激光时,照射在盾构机尾部内壁上的激光线;
10、激光区域提取模块,用于以所述激光图像作为输入,利用训练好的目标区域提取模型对所述激光图像中的激光区域进行提取,得到激光区域图像;所述训练好的目标区域提取模型采用改进后的yolov8模型,所述改进后的yolov8模型是对yolov8模型进行改进所得到的,改进包括:将yolov8模型的特征提取器的c2f模块中的卷积结构替换为双重卷积结构,在yolov8模型的特征提取器的中间c2f模块之前增加注意力机制层,去除yolov8模型的目标检测器的小目标检测器和中目标检测器;所述中间c2f模块为yolov8模型的特征提取器中除第一个c2f模块和最后一个c2f模块之外的c2f模块;
11、特征点提取模块,用于对所述激光区域图像中的第一激光线和第二激光线进行特征提取,得到第一特征点、第二特征点和第三特征点;所述第一特征点为所述第一激光线的一个端点;所述第二特征点为所述第一激光线的另一个端点;所述第三特征点为所述第一激光线和所述第二激光线的交点;
12、盾尾间隙计算模块,用于基于所述第一特征点的像素坐标、所述第二特征点的像素坐标和所述第三特征点的像素坐标,计算所述管片的壁厚的第一像素距离和盾尾间隙的第二像素距离,并基于所述管片的壁厚的真实值、所述第一像素距离和所述第二像素距离,计算得到盾尾间隙的真实值;所述盾尾间隙为所述管片的外壁与所述盾构机尾部内壁之间的距离。
13、第三方面,本申请提供了一种计算机设备,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序以实现上述的盾构机盾尾间隙测量方法。
14、第四方面,本申请提供了一种计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现上述的盾构机盾尾间隙测量方法。
15、根据本申请提供的具体实施例,本申请公开了以下技术效果:
16、本申请提供了一种盾构机盾尾间隙测量方法、装置、设备及介质,利用训练好的目标区域提取模型对盾构机尾部的激光图像中的激光区域进行提取,得到激光区域图像,后续对激光区域图像中的第一激光线和第二激光线进行特征提取,得到第一特征点、第二特征点和第三特征点,基于第一特征点的像素坐标、第二特征点的像素坐标、第三特征点的像素坐标和管片的壁厚的真实值,计算得到盾尾间隙的真实值,本发明通过改进后的yolov8模型来提取激光区域,后续对激光区域图像进行处理来测量得到盾尾间隙,能够排除现场环境的干扰,比如光源干扰,且借助于改进后的yolov8模型的高精度和轻量化的优势,实现高效准确的测量盾尾间隙。
技术特征:
1.一种盾构机盾尾间隙测量方法,其特征在于,所述盾构机盾尾间隙测量方法包括:
2.根据权利要求1所述的盾构机盾尾间隙测量方法,其特征在于,在对所述激光区域图像中的第一激光线和第二激光线进行特征提取之前,所述盾构机盾尾间隙测量方法还包括:
3.根据权利要求2所述的盾构机盾尾间隙测量方法,其特征在于,对所述激光区域图像进行二值化处理,得到黑白图像,具体包括:
4.根据权利要求2所述的盾构机盾尾间隙测量方法,其特征在于,对所述黑白图像进行滤波处理,得到滤波后图像,具体包括:
5.根据权利要求2所述的盾构机盾尾间隙测量方法,其特征在于,对所述滤波后图像中的第一激光线和第二激光线进行描边处理,得到描边后图像,具体包括:
6.根据权利要求1所述的盾构机盾尾间隙测量方法,其特征在于,对所述激光区域图像中的第一激光线和第二激光线进行特征提取,得到第一特征点、第二特征点和第三特征点,具体包括:
7.根据权利要求1所述的盾构机盾尾间隙测量方法,其特征在于,基于所述第一特征点的像素坐标、所述第二特征点的像素坐标和所述第三特征点的像素坐标,计算所述管片的壁厚的第一像素距离和盾尾间隙的第二像素距离,并基于所述管片的壁厚的真实值、所述第一像素距离和所述第二像素距离,计算得到盾尾间隙的真实值,具体包括:
8.一种盾构机盾尾间隙测量装置,其特征在于,所述盾构机盾尾间隙测量装置包括:
9.一种计算机设备,包括:存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序以实现权利要求1-7中任一项所述的盾构机盾尾间隙测量方法。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1-7中任一项所述的盾构机盾尾间隙测量方法。
技术总结
本申请公开了一种盾构机盾尾间隙测量方法、装置、设备及介质,涉及盾尾间隙测量技术领域,利用训练好的目标区域提取模型对盾构机尾部的激光图像中的激光区域进行提取,后续对激光区域图像中的第一激光线和第二激光线进行特征提取,得到第一特征点、第二特征点和第三特征点,基于第一特征点的像素坐标、第二特征点的像素坐标、第三特征点的像素坐标和管片的壁厚的真实值,计算得到盾尾间隙的真实值,本发明通过改进后的Yolov8模型来提取激光区域,后续对激光区域图像进行处理来测量得到盾尾间隙,能够排除现场环境的干扰,比如光源干扰,且借助于改进后的Yolov8模型的高精度和轻量化的优势,实现高效准确的测量盾尾间隙。
技术研发人员:陆荣秀,吴如琛,杨辉,周艳丽,杨刚,万嘉昱,谢庆淋
受保护的技术使用者:华东交通大学
技术研发日:
技术公布日:2024/9/17
- 还没有人留言评论。精彩留言会获得点赞!