一种基于超宽带技术的高精度测距装置
本发明属于无线通信和无线测距,具体是一种基于超宽带技术的高精度测距装置。
背景技术:
1、在无线测距领域,较为成熟的技术主要包括:gps、蓝牙(ibeacon)、rfid、激光、wifi等。其中,gps只在室外有效,且精度较低,只有米量级,如果采用差分gps,虽然可达到厘米级,但是布设要求与成本较高,且不适于室内测试;基于蓝牙技术的ibeacon定位,一般最大距离只有米量级,而且由于是信号强度检测,所以定位精度很差,且受到环境极大的影响;rfid虽然成本很低,但是受限于工作原理,是基于“0”与“1”的检测,只能判断出是否存在于附近,基本没有定位精度;激光测距精度高稳定性好,但容易受到环境光干扰,距离较近,并且在某些特定场景下存在安全隐患;wifi测距覆盖范围广,成本较低,但无线稳定性差,功耗高,测距精度差。上述技术对于大部分需要毫米级监测精度的无线位移监测行业都无法满足需求。
2、超宽带技术(uwb)是利用极窄时间域脉冲传输数据的无线通信技术。主要特点是波形时间短、带宽非常宽广,可以在很小的能量水平下传输高速数据。利用超宽带技术进行测距的基本原理是通过测量电磁脉冲从发射端到接收端的时间差来计算距离。信号发射器产生一系列连续信号,再由接收器接收。通过比较发射和接收的数据,可以确定信号传播的时间,从而得出从发射器到接收器的距离。超宽带技术以其独特的信号传输速度快、抗干扰能力强和安全性高等优点,为无线测距提供了新的解决方案。
技术实现思路
1、针对毫米级无线测距精度的需求,本发明的目的是提供一种基于超宽带技术的高精度测距装置,该装置可以在多种应用场景中实现高精度、高稳定性的测距。
2、为实现上述目的,本发明采用以下技术方案:
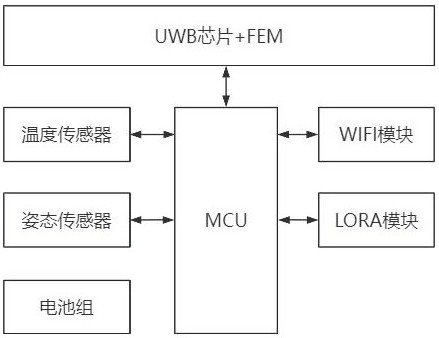
3、一种基于超宽带技术的高精度测距装置,包括微控制器、uwb芯片、wifi模块、lora模块、壳体、天线和电池组,所述的微控制器连接有检测壳体内腔温度的第一温度传感器、检测uwb芯片温度的第二温度传感器和检测壳体加速度变化的姿态传感器,uwb芯片、wifi模块和lora模块分别与微控制器交互式通信连接;所述的微控制器安装有嵌入式软件,嵌入式软件运行信号采集及数据处理滤波算法;所述的uwb芯片负责收发测距信号,其内部拥有时间戳计数器,且支持双边双向测距;所述的天线包括uwb天线、wifi天线和lora天线,uwb天线采用低群延时超宽带天线,其射频接口与uwb射频输出间设有收发一体的高增益fem芯片;微控制器根据第二温度传感器检测的uwb芯片温度对测距结果进行修正,微控制器还根据姿态传感器检测的壳体加速度变化数据对uwb芯片的测距结果进行滤波。
4、所述的uwb芯片采用dw1000芯片,dw1000芯片采用x波段的7信道进行工作,每次测距耗时不超过2.38毫秒。
5、所述的uwb芯片采用高精度温补晶振(tcxo),其年漂移小于1ppm,在-40至+85摄氏度内的温度漂移在±100ppb内。
6、所述的uwb芯片其uwb参数配置为:前导码长度256,采集块大小64。
7、所述的uwb芯片通过获取信号的噪声信息,进行基于3-西格玛准则的噪声滤波算法,以去除噪声过大的数据;所述uwb芯片在接收信号时,还根据各个测距数据对应的fp功率,利用3-西格玛准则进行一次fp功率数据滤波。
8、所述的微控制器采集姿态传感器的三轴加速度,进行加速度滤波。
9、所述的微控制器通过在固定长度下长时间采集测距数据和第二温度传感器数据,得到测距结果和uwb芯片温度变化的关系,根据此关系进行温度补偿,以提高测距结果稳定性。
10、所述的wifi模块用于传输数据或对装置进行固件升级。
11、所述的lora模块用于传输数据或进行装置间同步。
12、所述的电池组为充电电池。
13、本发明还提供了如上所述高精度测距装置的运行方法,包括以下步骤:
14、步骤s1、测距装置在非测距时间进行深度休眠;
15、步骤s2、由定时器或姿态传感器唤醒测距装置的测距功能;
16、步骤s3、测距功能启动后,微控制器作为主控mcu,主控mcu控制uwb芯片进行测距的同时,同步进行加速度的采集和温度采集,然后通过wifi或lora将数据传输至外部数据接收装置;
17、步骤s4、测距结束,主控mcu根据自身时隙的配置参数、同步头接收时间和本地时间计数器数值,综合计算出下次测距的时间,并设置定时器定时唤醒。
18、所述步骤s2中,姿态传感器唤醒测距装置的测距功能的具体方法如下:姿态传感器检测到外部环境产生震动时,立即唤醒测距装置的主控mcu进行测距。
19、与现有技术相比,本发明的优点和有益效果在于:
20、1.采用多种手段的优化组合,实现了毫米级的高精度无线测距。
21、2.根据本发明提供的技术方案,装置可实现小体积、轻重量、高密封性的设计,且自带电池,可长期低功耗工作,便于安装布设、维护成本低,易于工程化使用。
技术特征:
1.一种基于超宽带技术的高精度测距装置,包括微控制器、uwb芯片、wifi模块、lora模块、壳体、天线和电池组,其特征是:所述的微控制器连接有检测壳体内腔温度的第一温度传感器、检测uwb芯片温度的第二温度传感器和检测壳体加速度变化的姿态传感器,uwb芯片、wifi模块和lora模块分别与微控制器交互式通信连接;所述的微控制器安装有嵌入式软件,嵌入式软件运行信号采集及数据处理滤波算法;所述的uwb芯片负责收发测距信号,其内部拥有时间戳计数器,且支持双边双向测距;所述的天线包括uwb天线、wifi天线和lora天线,uwb天线采用低群延时超宽带天线,其射频接口与uwb射频输出间设有收发一体的高增益fem芯片;微控制器根据第二温度传感器检测的uwb芯片温度对测距结果进行修正,微控制器还根据姿态传感器检测的壳体加速度变化数据对uwb芯片的测距结果进行滤波。
2.根据权利要求1所述的一种基于超宽带技术的高精度测距装置,其特征是:所述的uwb芯片采用dw1000芯片,dw1000芯片采用x波段的7信道进行工作,每次测距耗时不超过2.38毫秒。
3.根据权利要求2所述的一种基于超宽带技术的高精度测距装置,其特征是:所述的uwb芯片采用高精度温补晶振(tcxo),其年漂移小于1ppm,在-40至+85摄氏度内的温度漂移在±100ppb内。
4.根据权利要求3所述的一种基于超宽带技术的高精度测距装置,其特征是:所述的uwb芯片其uwb参数配置为:前导码长度256,采集块大小64。
5.根据权利要求4所述的一种基于超宽带技术的高精度测距装置,其特征是:所述的uwb芯片通过获取信号的噪声信息,进行基于3-西格玛准则的噪声滤波算法,以去除噪声过大的数据;所述uwb芯片在接收信号时,还根据各个测距数据对应的fp功率,利用3-西格玛准则进行一次fp功率数据滤波。
6.根据权利要求1所述的一种基于超宽带技术的高精度测距装置,其特征是:所述的微控制器采集姿态传感器的三轴加速度,进行加速度滤波。
7.根据权利要求1所述的一种基于超宽带技术的高精度测距装置,其特征是:所述的微控制器通过在固定长度下长时间采集测距数据和第二温度传感器数据,得到测距结果和uwb芯片温度变化的关系,根据此关系进行温度补偿,以提高测距结果稳定性。
8.一种如权利要求1-7任一项所述高精度测距装置的运行方法,其特征是:包括以下步骤:
9.根据权利要求8所述的运行方法,其特征是:所述步骤s2中,姿态传感器唤醒测距装置的测距功能的具体方法如下:姿态传感器检测到外部环境产生震动时,立即唤醒测距装置的主控mcu进行测距。
技术总结
本发明公开了一种基于超宽带技术的高精度测距装置,包括硬件和嵌入式软件两部分,其中硬件包括微控制器(MCU)、第一温度传感器、第二温度传感器、姿态传感器、UWB芯片、WIFI模块、LORA模块、电池组、壳体和天线。本发明通过综合运用高性能元器件、滤波降噪、温度补偿等多种技术手段,可实现毫米级测距精度,具有便于安装布设、维护成本低,易于工程化使用等优点。
技术研发人员:周会娟,陈晋央,杨雨涵,余尚江,马新宝,陈显,孟晓洁,栗韶良,常远
受保护的技术使用者:中国人民解放军军事科学院国防工程研究院工程防护研究所
技术研发日:
技术公布日:2024/11/4
- 还没有人留言评论。精彩留言会获得点赞!