本发明属于计算光学显微成像,尤其涉及一种频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法。
背景技术:
1、傅里叶叠层显微成像(fourier ptychographic microscopy,fpm)技术作为一种全新的计算光学成像方法,不同于传统显微镜“所见即所得”的观测模式,结合了相位恢复、叠层成像以及合成孔径等技术思想,通过迭代式算法将不同角度照明下采集的信息在频域上进行融合,从而突破明场下显微物镜数值孔径的限制,获得超出原有系统频率限制的样品复振幅信息,在保有原有物镜视场大小的前提下,实现分辨率的提高。
2、在傅里叶叠层显微成像过程中,需要确定每个led对应的照明角度,用于迭代更新过程中确定对应图像的频谱方位,从而进行振幅替换实现孔径融合及相位恢复。然而,由于led灯板的xy位置偏移误差、旋转误差以及高度误差的影响,照明的位置难以准确获得,严重影响重建的成像质量。因此,如何获得led照明的准确位置,从而提升傅里叶叠层显微成像的重建效果,是一个亟待解决的关键问题。
技术实现思路
1、有鉴于此,本发明创造旨在提供一种频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,在相机前插入附加透镜,使得相机靶面与物镜后焦面共轭,点亮led单元并采集到系统的频谱图像,并得到不同led的照明角度,配合傅里叶叠层重建算法进而精确测量系统的照明角度。
2、为达到上述目的,本发明创造的技术方案是这样实现的:
3、一种频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,具体包括以下步骤:
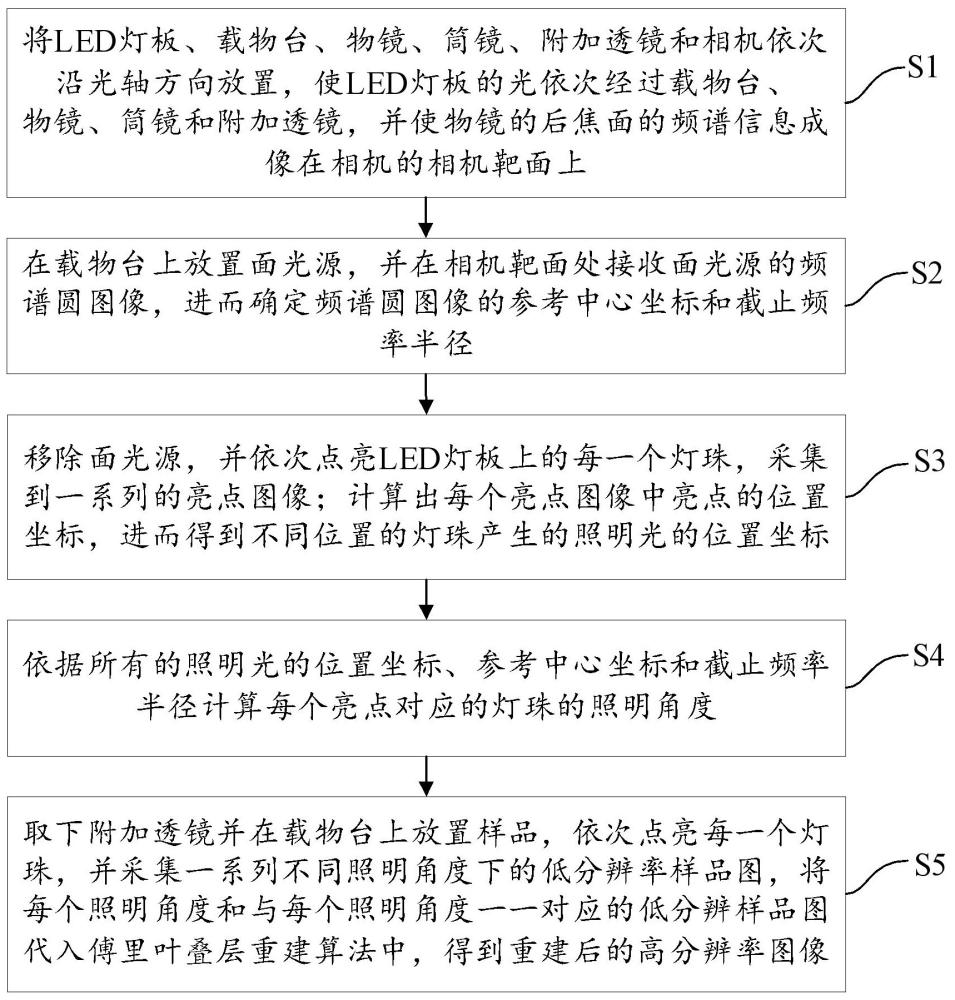
4、s1:将led灯板、载物台、物镜、筒镜、附加透镜和相机依次沿光轴方向放置,使led灯板的光依次经过载物台、物镜、筒镜和附加透镜,并使物镜的后焦面的频谱信息成像在相机的相机靶面上;
5、s2:在载物台上放置面光源,并在相机靶面处接收面光源的频谱圆图像,并确定频谱圆图像的参考中心坐标和截止频率半径;
6、s3:移除面光源,并依次点亮led灯板上的每一个灯珠,采集到一系列的亮点图像;计算出每个亮点图像中亮点的位置坐标,进而得到不同位置的灯珠产生的照明光的位置坐标;
7、s4:依据所有的照明光的位置坐标、参考中心坐标和截止频率半径计算每个亮点对应的灯珠的照明角度;
8、s5:取下附加透镜并在载物台上放置样品,依次点亮每一个灯珠,并采集一系列不同照明角度下的低分辨率样品图,将每个照明角度和与每个照明角度一一对应的低分辨样品图代入傅里叶叠层重建算法中,得到重建后的高分辨率图像。
9、进一步的,面光源的照明面积大于物镜的口径。
10、进一步的,灯珠的数量不少于3个,且led灯板还包括中心灯,中心灯位于led灯板的中心位置处,所有的灯珠围绕中心灯均匀圆周布置。
11、进一步的,在步骤s2中,在相机靶面处接收频谱圆图像后,对频谱圆图像利用otus算法进行二值化,对二值化后的图像依次进行开闭操作的去噪操作以及霍夫变换的圆拟合操作后得到拟合圆,拟合圆在基坐标系的圆心坐标即为参考中心坐标,拟合圆的半径即为截止频率半径。
12、进一步的,在步骤s3中,每个亮点图像中亮点的位置坐标的计算过程包括:遍历每个亮点图像中的所有像素并标记每个亮点图像中灰度值最大的像素点为中心像素点,以中心像素点为中心截取像素块并计算像素块的平均灰度值,选取像素块中灰度值与平均灰度值最接近的像素点的位置坐标即为每个亮点图像中亮点的位置坐标。
13、进一步的,步骤s4具体包括以下步骤:
14、s41:根据下式计算一系列的亮点图像中每个亮点与频谱圆图像的参考中心的距离:
15、;
16、;
17、其中,表示灯珠的个数;表示第i个灯珠产生的照明光在基坐标系下的位置坐标,表示参考中心坐标;表示第i个灯珠与参考中心坐标在基坐标系下x轴上的距离;表示第i个灯珠与所述参考中心坐标在基坐标系下y轴上的距离;
18、s42:根据下式计算每个灯珠的照明角度:
19、;
20、;
21、其中,和表示第i个灯珠的照明角度分别在x轴和y轴下的分量,表示物镜的数值孔径;表示截止频率半径。
22、进一步的,步骤s5具体包括以下步骤:
23、s51:根据物镜的数值孔径和led灯板的发光波长计算当前led灯板、载物台、物镜、筒镜和相机组成的成像系统的光瞳函数;
24、s52:使用中心灯照射样品,并利用相机得到样本图像,对样本图像进行上采样得到初始图像,对初始图像进行傅里叶变换得到初始频谱;
25、s53:根据初始频谱、光瞳函数和每个灯珠的照明角度得到每个灯珠对应的待重建样本子区域的复振幅;
26、s54:根据每个灯珠对应的低分辨率样品图和待重建样本子区域的复振幅得到每个灯珠对应的子频谱复振幅估计值;
27、s55:将每个灯珠对应的子频谱复振幅估计值变换至频域,并对应替换初始频谱上对应照明角度的子频谱区域,直至所有照明角度的子频谱区域全部替换初始频谱得到完整频谱;
28、s56:n次重复步骤s53~s55,每重复一次,计算一次损失函数,直至损失函数收敛,此时的完整频谱的逆傅里叶图像即为高分辨率图像。
29、进一步的,在步骤s53中,每个灯珠对应的待重建样本子区域的复振幅为:
30、;
31、其中,表示第i个灯珠对应的待重建样本子区域的复振幅,表示傅里叶变换,表示初始频谱,表示光瞳函数,表示频域坐标,表示发光波长。
32、进一步的,在步骤s54中,每个灯珠对应的子频谱复振幅估计值为:
33、;
34、其中,表示第i个灯珠对应的子频谱复振幅估计值,表示第i个灯珠对应的低分辨率样品图的图像强度。
35、进一步的,在步骤s56中,第n次重复时的损失函数计算公式为:
36、;
37、其中,表示第n次重复时的损失函数,,表示第n次重复时的完整频谱,表示第i个灯珠对应的光瞳函数;当满足≤0.001时停止迭代,此时的完整频谱的逆傅里叶图像即为高分辨率图像。
38、与现有技术相比,本发明创造能够取得如下有益效果:
39、本发明创造所述的频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法中,在不放置样本的情况下,在相机前插入附加透镜,使得相机靶面与物镜后焦面共轭,点亮led单元并采集到系统的频谱图像,并得到不同led的照明角度,配合傅里叶叠层重建算法进而精确测量系统的照明角度。因此,本方法不需要精确获得led的位置和高度信息,可以直接获得led的照明角度信息。与传统的照明角度获取方法相比,本方法更为稳定、可靠。
技术特征:1.一种频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,其特征在于:具体包括以下步骤:
2.根据权利要求1所述的频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,其特征在于:所述面光源的照明面积大于所述物镜的口径。
3.根据权利要求1所述的频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,其特征在于:所述灯珠的数量不少于3个,且所述led灯板还包括中心灯,所述中心灯位于所述led灯板的中心位置处,所有的灯珠围绕所述中心灯均匀圆周布置。
4.根据权利要求3所述的频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,其特征在于:在所述步骤s2中,在所述相机靶面处接收所述频谱圆图像后,对所述频谱圆图像利用otus算法进行二值化,对二值化后的图像依次进行开闭操作的去噪操作以及霍夫变换的圆拟合操作后得到拟合圆,所述拟合圆在基坐标系的圆心坐标即为所述参考中心坐标,所述拟合圆的半径即为所述截止频率半径。
5.根据权利要求1所述的频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,其特征在于:在所述步骤s3中,每个亮点图像中亮点的位置坐标的计算过程包括:遍历每个亮点图像中的所有像素并标记每个亮点图像中灰度值最大的像素点为中心像素点,以所述中心像素点为中心截取像素块并计算所述像素块的平均灰度值,选取所述像素块中灰度值与所述平均灰度值最接近的像素点的位置坐标即为每个亮点图像中亮点的位置坐标。
6.根据权利要求4所述的频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,其特征在于:所述步骤s4具体包括以下步骤:
7.根据权利要求6所述的频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,其特征在于:所述步骤s5具体包括以下步骤:
8.根据权利要求7所述的频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,其特征在于:在所述步骤s53中,每个灯珠对应的待重建样本子区域的复振幅为:
9.根据权利要求8所述的频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,其特征在于:在所述步骤s54中,每个灯珠对应的子频谱复振幅估计值为:
10.根据权利要求9所述的频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,其特征在于:在所述步骤s56中,第n次重复时的损失函数计算公式为:
技术总结本发明涉及计算光学显微成像技术领域,尤其涉及一种频谱共轭的傅里叶叠层显微成像系统照明角度的测量方法,通过在筒镜和相机之间插入附加透镜,保证物镜后焦面与相机靶面的共轭关系;在载物台上放置面光源,使用相机获得频谱圆图像并确定其参考中心坐标和截止频率半径;取下该面光源并依次点亮LED灯珠,采集一系列不同照明角度下的光点图像,依据参考中心坐标和截止频率半径计算每个亮点对应的灯珠的照明角度;最后取下附加透镜,完成LED不同灯珠的照明角度的测量。本发明通过LED灯珠照明角度和物镜NA明场边缘角度的比值关系实现照明角度的测量,不需要测量LED灯板和样品之间的距离,具有结构简单,实现简易,测量快速等优点。
技术研发人员:李大禹,张先奔,穆全全,彭增辉,刁志辉,鲁兴海
受保护的技术使用者:中国科学院长春光学精密机械与物理研究所
技术研发日:技术公布日:2024/9/17