一种基于水下机器人的电缆工井勘测方法与流程
本发明属于电缆工井勘测,尤其涉及一种基于水下机器人的电缆工井勘测方法。
背景技术:
1、城市地下电缆工井由于年代久远,数据文档存在不完善,在设计、敷设和运维电缆前,需要对电缆工井及电缆管道勘测,从而为其提供准确的信息。
2、地下电缆工井由于雨水或其他水源,大部分情况下都是处于有水状态。常见的电缆工井勘测方式均先进行排水和通风,再由人工下井勘测,整个过程需要4-5小时。可见,传统的电缆工井人工勘测存在工作效率低、人员安全隐患高和环境污染等问题。
技术实现思路
1、本发明目的在于提供一种基于水下机器人的电缆工井勘测方法,以解决背景技术中提出的技术问题。
2、为实现上述目的,本发明的所采取的技术方案是:
3、一种基于水下机器人的电缆工井勘测方法,其包括以下步骤:
4、步骤1:水下机器人潜入电缆工井积水中;
5、步骤2:控制水下机器人上的视觉系统工作,实时拍摄电缆工井内部电缆分布情况;水下机器人控制推进器工作在电缆工井内行走,行走时根据视觉系统传输的信号进行避障;
6、步骤3:根据视觉系统传输的信号调整水下机器人下潜深度,至不会受电缆工井内部障碍物影响的深度时,调整推进器使得水下机器人悬停;
7、步骤4:水下机器人上的陀螺仪实时监测水下机器人的状态情况,控制推进器工作调整水下机器人的姿态,为电缆工井勘测提供不同姿态和位置;
8、步骤5:多波束测距声呐测量距电缆工井的井壁和井底的距离,控制系统记录测量数据;
9、步骤6:根据视觉系统传输的信号,多次控制推进器工作,调整水下机器人的位置,多波束测距声呐测量物体间的距离;
10、步骤7:根据视觉系统传输的信号,多次控制推进器工作,调整水下机器人的位置使水下机器人的前端与被测物相对,激光标尺发出两道平行激光标记目标物,与图像分析配合完成对物体大小的测量。
11、作为本发明的进一步改进,所述视觉系统包括一个主系统和三个辅助系统;
12、所述主系统设置在所述水下机器人的前端;其中两个所述辅助系统设置在所述水下机器人的左右两端,另一个所述辅助系统设置在所述水下机器人的底端。
13、作为本发明的进一步改进,所述视觉系统包括摄像头和补光灯。
14、作为本发明的进一步改进,所述推进器设置为矢量推进器,其中心线与所述水下机器人的中心点为坐标轴的三个轴线均呈一定夹角。
15、作为本发明的进一步改进,所述推进器设置8个,分别设置在所述水下机器人的上端和底端的四个角处。
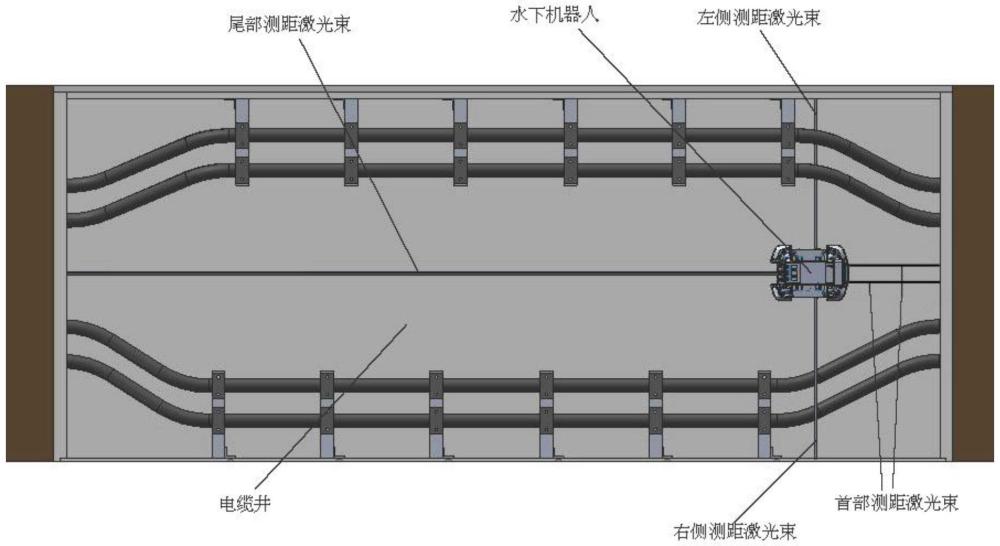
16、作为本发明的进一步改进,所述多波束测距声呐包括两个前端测距声呐、一个左侧测距声呐、一个右侧测距声呐、一个尾部测距声呐和一个底部测距声呐。
17、作为本发明的进一步改进,两个所述前端测距声呐水平。
18、作为本发明的进一步改进,所述激光标尺的内部设有两个平行的激光发射器,两个所述激光发射器发出两道激光。
19、作为本发明的进一步改进,所述控制系统与所述视觉系统、所述推进器、所述陀螺仪、所述多波束测距声呐均电性连接。
20、作为本发明的进一步改进,所述控制系统内部的处理器为stm32微处理器。
21、采用上述技术方案所产生的有益效果在于:
22、本发明提供的基于水下机器人的电缆工井勘测方法,能在电缆工井内自由通行;通过推进器控制水下机器人的下潜深度、悬停、行走和姿态调节,通过视觉系统完成机器人时的避障和电缆工井内部电缆分布状态的观测;通过陀螺仪实时监测机器人的姿态,通过两个前端声呐确认水下机器人在测量时机器人本体与电缆工井的方位;通过多波束声呐进行测距,进而完成电缆工井的勘测工作。
23、本发明与原有勘测方式相比,无需抽水、排风和人员下井勘测的过程,在提高勘测的工作效率的同时,也可以大大提高经济效益。同时,避免了勘测人员下井而带来的各种人身意外风险。
技术特征:
1.一种基于水下机器人的电缆工井勘测方法,其特征在于:其包括以下步骤:
2.根据权利要求1所述的一种基于水下机器人的电缆工井勘测方法,其特征在于:所述视觉系统包括一个主系统和三个辅助系统;
3.根据权利要求1所述的一种基于水下机器人的电缆工井勘测方法,其特征在于:所述视觉系统包括摄像头和补光灯。
4.根据权利要求1所述的一种基于水下机器人的电缆工井勘测方法,其特征在于:所述推进器设置为矢量推进器,其中心线与所述水下机器人的中心点为坐标轴的三个轴线均呈一定夹角。
5.根据权利要求1所述的一种基于水下机器人的电缆工井勘测方法,其特征在于:所述推进器设置8个,分别设置在所述水下机器人的上端和底端的四个角处。
6.根据权利要求1所述的一种基于水下机器人的电缆工井勘测方法,其特征在于:所述多波束测距声呐包括两个前端测距声呐、一个左侧测距声呐、一个右侧测距声呐、一个尾部测距声呐和一个底部测距声呐。
7.根据权利要求6所述的一种基于水下机器人的电缆工井勘测方法,其特征在于:两个所述前端测距声呐水平。
8.根据权利要求1所述的一种基于水下机器人的电缆工井勘测方法,其特征在于:所述激光标尺的内部设有两个平行的激光发射器,两个所述激光发射器发出两道激光。
9.根据权利要求1所述的一种基于水下机器人的电缆工井勘测方法,其特征在于:所述控制系统与所述视觉系统、所述推进器、所述陀螺仪、所述多波束测距声呐均电性连接。
10.根据权利要求1所述的一种基于水下机器人的电缆工井勘测方法,其特征在于:所述控制系统内部的处理器为stm32微处理器。
技术总结
本发明涉及一种基于水下机器人的电缆工井勘测方法,其包括以下步骤:步骤1:水下机器人潜入电缆工井积水中;步骤2:控制水下机器人上的视觉系统工作,实时拍摄电缆工井内部电缆分布情况;水下机器人通过控制推进器工作在电缆工井内行走;步骤3:调整水下机器人下潜深度,调整推进器使得水下机器人悬停;步骤4:水下机器人上的陀螺仪实时检测水下机器人的方位情况,控制推进器工作调整水下机器人的姿态;步骤5:多波束测距声呐测量距电缆工井的井壁和井底的距离,控制系统记录测量数据;步骤6:调整水下机器人的位置,多波束测距声呐测量距电缆的结构尺寸;步骤7:水下机器人的前端与端面等物体相对,激光标尺激光标记目标物。
技术研发人员:沈京京,朱超杰,吕征宇,梁海生,索瑞鸿,杨子烨,朱音洁,解鹏程,郭魏芬
受保护的技术使用者:国网上海市电力公司
技术研发日:
技术公布日:2025/3/10
- 还没有人留言评论。精彩留言会获得点赞!