一种芯片行波马达式陀螺寻北仪
本发明属于惯性导航,特别是一种芯片行波马达式陀螺寻北仪。
背景技术:
1、随着无人控制系统集成度的不断提高,各类设备中陀螺寻北系统的小型化应用问题日益突出,主要表现在两个方面:第一,在核心器件方面,传统的光学陀螺仪、机械陀螺仪等虽然能够满足寻北需求,但较大的体积导致其难以嵌入应用于各类小型装备,较高的成本同样导致其无法单系统列装,而成本低、体积小的mems惯性器件性能不够高,仅依靠其难以实现高精度定向;第二,旋转机构方面:基于旋转调制技术可不依赖惯性器件精度而低成本地提升自主导航性能,但目前旋转调制寻北系统常用的电磁电机平台,体积和功耗大,且剩磁明显,对惯性组件的测量精度有较大影响。因此,为了实现基于mems惯性器件的高精度寻北,旋转平台作为旋转调制技术的硬件载体,成为了限制mems陀螺寻北仪发展的瓶颈问题。目前的小型化寻北仪大多采用传统电磁电机来驱动旋转平台旋转,其体积较大,且在小型化环境中的转位控制困难,无法满足控制寻北仪高精度需求。
技术实现思路
1、本发明的目的在于针对上述现有技术存在的问题,提供一种芯片行波马达式陀螺寻北仪。
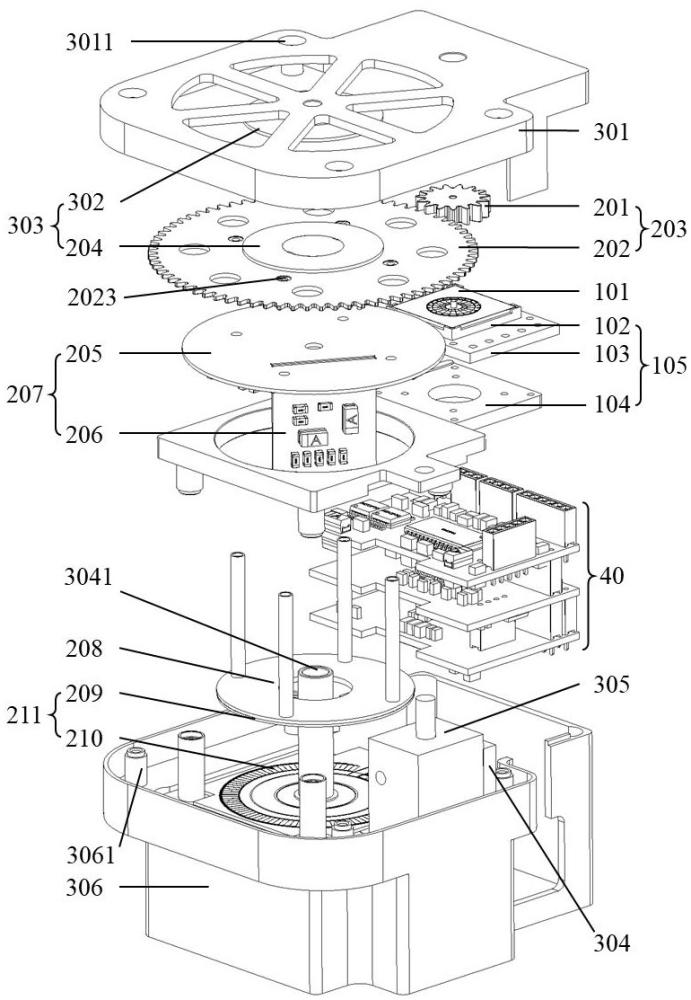
2、实现本发明目的的技术解决方案为:一种芯片行波马达式陀螺寻北仪,该寻北仪包括分段式安装结构,以及设置在所述分段式安装结构中的mems芯片行波马达、芯片行波马达旋转平台、惯性测量单元、mems电容角位置传感器、分段式芯片行波马达封装底座、无线供电单元、电磁转位限制机构和综合驱动采样控制电路板;所述mems芯片行波马达作为所述寻北仪的核心执行器,用于驱动芯片行波马达旋转平台旋转,进而带动安装于所述芯片行波马达旋转平台上的惯性测量单元旋转,所述mems芯片行波马达能便捷替换;所述mems电容角位置传感器用于检测惯性测量单元的转动特征,并由所述综合驱动采样控制电路板处理,以满足寻北仪的转位检测和控制需求;所述分段式芯片行波马达封装底座用于限位安装所述mems芯片行波马达,并通过与所述分段式安装结构相配合,实现所述芯片行波马达旋转平台中小齿轮转子和大齿轮平台的有效啮合;所述无线供电单元用于实现惯性测量单元的非接触式供电;所述电磁转位限制机构用于使得所述惯性测量单元固定转位步进。
3、进一步地,所述分段式芯片行波马达封装底座包括芯片封装底座、马达供电电路板以及马达限位安装座;所述mems芯片行波马达限位封装于所述芯片封装底座上,所述芯片封装底座上的第一限位装置与所述马达供电电路板上的第二限位装置对应装配,并通过粘性物质使两者紧密贴合;所述第一限位装置的高度大于所述马达供电电路板的厚度,所述第一限位装置贯穿所述马达供电电路板后与所述马达限位安装座上的第三限位装置相装配,所述马达供电电路板与所述限位安装座固定安装,由此实现mems芯片行波马达在所述分段式芯片行波马达封装底座的限位固定。
4、进一步地,所述小齿轮转子上的通孔与所述芯片封装底座上的转轴相限位配合;所述mems芯片行波马达驱动所述小齿轮转子旋转,之后通过齿轮啮合驱动所述大齿轮平台旋转,实现驱动力矩放大。
5、进一步地,所述惯性测量单元包括采样传输底板和陀螺底板;所述采样传输底板上集成有主控芯片、加速度计芯片以及无线传输芯片,所述陀螺底板上集成有陀螺仪芯片;所述陀螺底板垂直安装于所述采样传输底板上,并通过焊接的方式实现固定和信号互联;所述主控芯片用于采集加速度计芯片和陀螺仪芯片数据,并通过所述无线传输芯片发送数据给所述综合驱动采样控制电路板。
6、进一步地,所述惯性测量单元倒置安装于所述芯片行波马达旋转平台上,即所述采样传输底板安装于所述芯片行波马达旋转平台上;所述采样传输底板上的安装孔与所述大齿轮平台上的第四限位装置相配合,并与传感器安装座的安装部件相配合,三者之间固定安装,实现惯性测量单元、传感器安装座与芯片行波马达旋转平台的限位安装,形成整体旋转机构。
7、进一步地,所述分段式安装结构包括盖板、底座和外壳,所述外壳为上端开口结构,所述盖板盖于所述外壳的上端开口处形成密封腔体,所述底座安装于所述外壳中;所述底座与所述马达限位安装座固定安装。
8、进一步地,所述mems电容角位置传感器包括传感器转子和传感器定子;所述传感器转子限位安装于所述传感器安装座上,所述传感器定子限位安装于所述底座上。
9、进一步地,所述底座上装配轴承,所述大齿轮平台上的转轴与轴承相配合,实现所述芯片行波马达旋转平台的限位安装和低阻力旋转。
10、进一步地,所述无线供电单元包括发射线圈和接收线圈,所述发射线圈限位安装于所述盖板上,所述接收线圈限位安装于所述大齿轮平台上,所述发射线圈和接收线圈同心对转,实现所述惯性测量单元的非接触式供电和数据传输。
11、进一步地,所述电磁转位限制机构通过阻挡所述大齿轮平台上多根限位柱的旋转,以满足定位需求。
12、本发明与现有技术相比,其显著优点为:
13、1)本发明的芯片行波马达式陀螺寻北仪基于mems芯片行波马达,通过机械结构嵌入式装配惯性测量单元、mems电容角位置传感器、综合驱动采样控制电路板等,使整体旋转调制陀螺寻北仪内部紧密集成,体积尺寸显著缩小。
14、2)本发明基于mems电容角位置传感器和电磁转位限制机构的高精度角度控制技术,依托mems芯片行波马达驱动力可连续输出的特性,实现了惯性测量单元多位置精确步进,确保了旋转调制技术对惯性器件的常值误差补偿效果,有效提升了寻北性能。
15、3)本发明的无线供电单元和无线信号传输单元,实现了惯性测量单元的非接触供电,并实现了与综合驱动采样控制电路板无线通讯和数据传输,避免了寻北仪内部走线及缠绕,无需使用会带来旋转阻力的外部滑环,确保了惯性测量单元的高效步进,减少寻北时间。
16、4)考虑到mems芯片行波马达可能会出现的性能退化和破损问题,本发明的mems芯片行波马达、芯片封装底座和马达供电电路板可单独形成一个整体,若出现上述问题,本发明内的核心执行器mems芯片行波马达可便捷替换。
17、5)本发明的惯性测量单元采用倒置安装方式,避免了垂直安装的陀螺底板的高度带来的影响。
18、6)本发明的各机械组件之间均存在限位机构,确保了小齿轮转子与大齿轮平台的有效啮合、无线供电发射线圈与接收线圈的同心对转以及mems电容角位置传感器的可靠工作。
19、7)本发明可以广泛在各类微小型嵌入式惯性导航领域中应用。
20、下面结合附图对本发明作进一步详细描述。
技术特征:
1.一种芯片行波马达式陀螺寻北仪,其特征在于,该寻北仪包括分段式安装结构,以及设置在所述分段式安装结构中的mems芯片行波马达、芯片行波马达旋转平台、惯性测量单元、mems电容角位置传感器、分段式芯片行波马达封装底座、无线供电单元、电磁转位限制机构和综合驱动采样控制电路板;所述mems芯片行波马达作为所述寻北仪的核心执行器,用于驱动芯片行波马达旋转平台旋转,进而带动安装于所述芯片行波马达旋转平台上的惯性测量单元旋转,所述mems芯片行波马达能便捷替换;所述mems电容角位置传感器用于检测惯性测量单元的转动特征,并由所述综合驱动采样控制电路板处理,以满足寻北仪的转位检测和控制需求;所述分段式芯片行波马达封装底座用于限位安装所述mems芯片行波马达,并通过与所述分段式安装结构相配合,实现所述芯片行波马达旋转平台中小齿轮转子和大齿轮平台的有效啮合;所述无线供电单元用于实现惯性测量单元的非接触式供电;所述电磁转位限制机构用于使得所述惯性测量单元固定转位步进。
2.根据权利要求1所述的芯片行波马达式陀螺寻北仪,其特征在于,所述分段式芯片行波马达封装底座包括芯片封装底座、马达供电电路板以及马达限位安装座;所述mems芯片行波马达限位封装于所述芯片封装底座上,所述芯片封装底座上的第一限位装置与所述马达供电电路板上的第二限位装置对应装配,并通过粘性物质使两者紧密贴合;所述第一限位装置的高度大于所述马达供电电路板的厚度,所述第一限位装置贯穿所述马达供电电路板后与所述马达限位安装座上的第三限位装置相装配,所述马达供电电路板与所述限位安装座固定安装,由此实现mems芯片行波马达在所述分段式芯片行波马达封装底座的限位固定。
3.根据权利要求1或2所述的芯片行波马达式陀螺寻北仪,其特征在于,所述小齿轮转子上的通孔与所述芯片封装底座上的转轴相限位配合;所述mems芯片行波马达驱动所述小齿轮转子旋转,之后通过齿轮啮合驱动所述大齿轮平台旋转,实现驱动力矩放大。
4.根据权利要求1所述的芯片行波马达式陀螺寻北仪,其特征在于,所述惯性测量单元包括采样传输底板和陀螺底板;所述采样传输底板上集成有主控芯片、加速度计芯片以及无线传输芯片,所述陀螺底板上集成有陀螺仪芯片;所述陀螺底板垂直安装于所述采样传输底板上,并通过焊接的方式实现固定和信号互联;所述主控芯片用于采集加速度计芯片和陀螺仪芯片数据,并通过所述无线传输芯片发送数据给所述综合驱动采样控制电路板。
5.根据权利要求4所述的芯片行波马达式陀螺寻北仪,其特征在于,所述惯性测量单元倒置安装于所述芯片行波马达旋转平台上,即所述采样传输底板安装于所述芯片行波马达旋转平台上;所述采样传输底板上的安装孔与所述大齿轮平台上的第四限位装置相配合,并与传感器安装座的安装部件相配合,三者之间固定安装,实现惯性测量单元、传感器安装座与芯片行波马达旋转平台的限位安装,形成整体旋转机构。
6.根据权利要求2所述的芯片行波马达式陀螺寻北仪,其特征在于,所述分段式安装结构包括盖板、底座和外壳,所述外壳为上端开口结构,所述盖板盖于所述外壳的上端开口处形成密封腔体,所述底座安装于所述外壳中;所述底座与所述马达限位安装座固定安装。
7.根据权利要求5或6所述的芯片行波马达式陀螺寻北仪,其特征在于,所述mems电容角位置传感器包括传感器转子和传感器定子;所述传感器转子限位安装于所述传感器安装座上,所述传感器定子限位安装于所述底座上。
8.根据权利要求6所述的芯片行波马达式陀螺寻北仪,其特征在于,所述底座上装配轴承,所述大齿轮平台上的转轴与轴承相配合,实现所述芯片行波马达旋转平台的限位安装和低阻力旋转。
9.根据权利要求6所述的芯片行波马达式陀螺寻北仪,其特征在于,所述无线供电单元包括发射线圈和接收线圈,所述发射线圈限位安装于所述盖板上,所述接收线圈限位安装于所述大齿轮平台上,所述发射线圈和接收线圈同心对转,实现所述惯性测量单元的非接触式供电和数据传输。
10.根据权利要求1所述的芯片行波马达式陀螺寻北仪,其特征在于,所述电磁转位限制机构通过阻挡所述大齿轮平台上多根限位柱的旋转,以满足定位需求。
技术总结
本发明公开了一种芯片行波马达式陀螺寻北仪。本发明为分段式安装结构,基于MEMS芯片行波马达,通过机械结构嵌入式装配惯性测量单元、MEMS电容角位置传感器、综合驱动采样控制电路板,使整体旋转调制陀螺寻北仪内部紧密集成,体积尺寸显著缩小,基于MEMS电容角位置传感器和电磁转位限制机构的高精度角度控制技术,依托MEMS芯片行波马达驱动力可连续输出的特性,实现了惯性测量单元多位置精确步进,确保了旋转调制技术对惯性器件的常值误差补偿效果,有效提升了寻北性能。
技术研发人员:周同,谢锦宣,苏岩,周怡,王振军,姜波,张晶,白宏阳
受保护的技术使用者:南京理工大学
技术研发日:
技术公布日:2024/9/29
- 还没有人留言评论。精彩留言会获得点赞!