一种扰动主动控制装置的制作方法
本发明涉及一种扰动主动控制装置,用于地面液体管理试验的扰动主动控制,属于动力学试验的。
背景技术:
1、为提高运载能力,航天器携带的液体燃料占其总重量相当大。航天器在进行轨道转移、姿态机动、交会对接、分离以及发动机开关机时,会引起贮箱中液体燃料的晃动,该晃动对航天器的姿态控制和稳定性产生不可忽视的影响。诸多航天器发射失败,均是由液体燃料晃动导致的。如何抑制燃料晃动对航天器姿态控制的干扰是一个难题。
2、另外,液罐汽车广泛应用于液体货物的道路运输,然而非满载时,由于行驶过程中刹车、转向等操作,罐体内的液体晃动将存在晃动力作用于运输汽车上,操作不当将引起液罐车发生侧翻等交通事故。因此,在地面进行液体晃动模拟试验中,对施加扰动激励控制十分必要。
3、通过对被试液体施加扰动激励,模拟液体贮箱因姿态控制引起的液体燃料的晃动。通常,地面液体晃动研究的扰动激励主要通过弹簧施加或者推拉台实现,通过改变弹簧刚度及压缩行程和推拉位移、频率完成干扰载荷的施加。这种扰动载荷加载方式精度不高,扰动载荷形式单一。
技术实现思路
1、(一)要解决的技术问题
2、针对上述现有技术的不足,本发明提出一种扰动主动控制装置,其采用电动伺服驱动,在地面液态晃动试验过程中,对被试液体贮箱施加精确的扰动力;通过位移传感器、光栅尺作为闭环控制反馈,通过闭环算法以及插补算法,提高位移以及扰动力控制精度;通过加速度传感器实时获取施加在液体贮箱上的干扰力,通过摄像机记录扰动力下液体液面的变化规律,可以有效的解决地面液体晃动扰动力精确控制的关键技术问题。
3、(二)技术方案
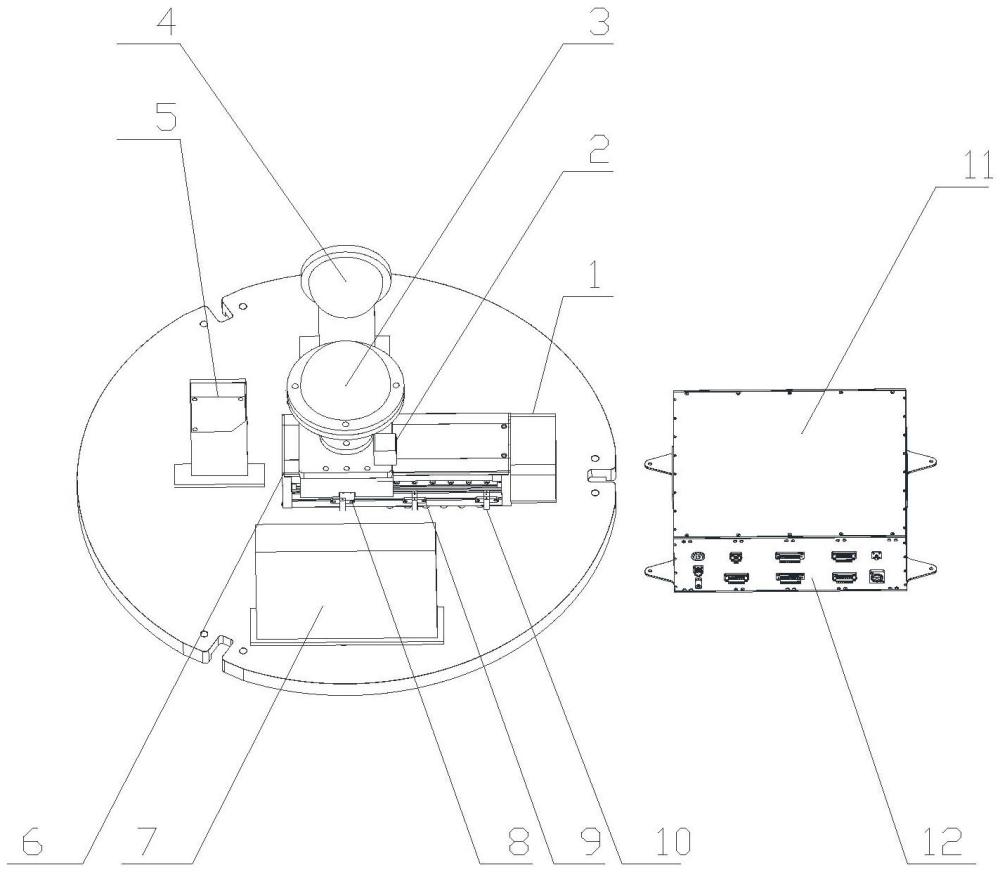
4、一种扰动主动控制装置,待测的模拟贮箱前侧设置有伺服驱动器,后侧设置有摄像机,左侧设置有激光位移传感器,右侧设置有伺服电机,模拟贮箱居中设置于装置安装板中央,伺服驱动器与摄像机关于模拟贮箱位置对称且均固定于装置安装板,激光位移传感器与伺服电机位置对称且均固定于装置安装板;所述扰动主动控制装置还包括带有电气接口的控制器。
5、伺服电机通过支撑框架固定于装置安装板上,支撑框架上还固定有滚珠丝杠、光电开关ⅰ、光电开关ⅱ、光电开关ⅲ和模拟贮箱安装转接板;滚珠丝杠一端与伺服电机驱动连接,另一端与模拟贮箱安装转接板固定连接,模拟贮箱安装转接板上固定有模拟贮箱;电开关ⅰ、光电开关ⅱ和光电开关ⅲ沿着滚珠丝杠一侧从靠近模拟贮箱一端向远离模拟贮箱一端依次设置;光栅尺设置在滚珠丝杠的另一侧。
6、伺服电机供电信号线与伺服驱动器输出电气接口连接,光电开关ⅰ、光电开关ⅱ、光电开关ⅲ与伺服驱动器数字接口连接,伺服驱动器通过ethercat总线与控制器的电气接口中的网口连接;加速度传感器和激光位移传感器通过信号线与控制器的电气接口上的模拟输入接口连接;光栅尺通过信号线与伺服驱动器的模拟输入接口连接。
7、摄像机镜头与模拟贮箱内液体液面齐平。
8、所述的扰动主动控制装置的扰动试验方法,包括以下步骤:
9、s1.含所述扰动主动控制装置在内的整个扰动试验系统准备;
10、s2.将所述扰动主动控制装置通电;
11、s3.将激光位移传感器、加速度传感器与控制器连接;
12、s4.选择直线扰动模式或正弦周期扰动模式;
13、s5.根据相应扰动模式,判断是否达标;
14、s6.如达标,结束扰动试验工作,如不达标,返回相应扰动模式中继续工作,直至达标。
15、在步骤s2中,控制器发送控制指令至伺服驱动器,伺服驱动器将滚珠丝杠运动至其中点位置,此时光电开关ⅱ触发,触发后将相应信号反馈至伺服驱动器,伺服驱动器及通过ethercat总线将该状态发送至控制器。
16、在步骤s5中,如选择为直线扰动模式,则先设定目标位置及速度,然后启动扰动模式,加速度传感器测量过载值,光栅尺和激光位移传感器测量当前位置,最后判断当前位置是否达标。
17、在步骤s5中,如选择为正弦周期扰动模式,则先设定幅值及频率,然后启动扰动模式,加速度传感器测量过载值,光栅尺和激光位移传感器测量当前位置,最后判断周期是否达标。
18、在步骤s6中,如不达标,返回相应扰动模式中,再次重新启动扰动模式,继续后续步骤,直至达标。
19、在控制器内设置扰动运动轨迹曲线,启动后,控制器下发控制指令至伺服驱动器,伺服驱动器按照指令控制伺服电机转动,伺服电机带动滚珠丝杠转动,使得模拟贮箱安装转接板上的模拟贮箱进行直线运动;光栅尺将模拟贮箱运动位置反馈至伺服驱动器,激光位移传感器将模拟贮箱的运动位置反馈至控制器,加速度传感器将模拟贮箱过载反馈至控制器;伺服驱动器和控制器分别以光栅尺反馈值和激光位移反馈值进行闭环控制,直至扰动主动控制装置运动完成目标轨迹,同时摄像机记录全程扰动下的液体贮箱内液体图像。
20、(三)有益效果
21、本发明的一种扰动主动控制装置,具有以下有益效果:
22、1.本发明采用基于电动伺服控制方法,通过控制伺服电机带动滚珠丝杠将伺服电机转动转化为直线运动,实现对模拟贮箱的横向扰动,并通过光栅尺、激光位移传感器分别获取扰动装置和试件的实际位置,通过闭环算法提高了扰动的精度。
23、2.本发明的扰动主动控制装置,通过安装在时间安装面的加速度传感器,可以精确获取扰动加速度,从而计算得到施加在模拟贮箱的扰动力,并通过摄像机记录并存储扰动力作用下模拟贮箱内液体的液面状态。
24、3.本发明通过电动伺服驱动技术,按照模块化设计,配置不同规格的伺服电机、滚珠丝杠等配件,满足不同被试产品负载下的扰动试验。
技术特征:
1.一种扰动主动控制装置,其特征在于,待测的模拟贮箱(3)前侧设置有伺服驱动器(7),后侧设置有摄像机(4),左侧设置有激光位移传感器(5),右侧设置有伺服电机(1),模拟贮箱(3)居中设置于装置安装板(16)中央,伺服驱动器(7)与摄像机(4)关于模拟贮箱(3)位置对称且均固定于装置安装板(16),激光位移传感器(5)与伺服电机(1)位置对称且均固定于装置安装板(16);所述扰动主动控制装置还包括带有电气接口(12)的控制器(11)。
2.如权利要求1所述的扰动主动控制装置,其特征在于,伺服电机(1)通过支撑框架(6)固定于装置安装板(16)上,支撑框架(6)上还固定有滚珠丝杠(13)、光电开关ⅰ(8)、光电开关ⅱ(9)、光电开关ⅲ(10)和模拟贮箱安装转接板(15);滚珠丝杠(13)一端与伺服电机(1)驱动连接,另一端与模拟贮箱安装转接板(15)固定连接,模拟贮箱安装转接板(15)上固定有模拟贮箱(3);电开关ⅰ(8)、光电开关ⅱ(9)和光电开关ⅲ(10)沿着滚珠丝杠(13)一侧从靠近模拟贮箱(3)一端向远离模拟贮箱(3)一端依次设置;光栅尺(14)设置在滚珠丝杠(13)的另一侧。
3.如权利要求2所述的扰动主动控制装置,其特征在于,伺服电机(1)供电信号线与伺服驱动器(7)输出电气接口连接,光电开关ⅰ(8)、光电开关ⅱ(9)、光电开关ⅲ(10)与伺服驱动器(7)数字接口连接,伺服驱动器(7)通过ethercat总线与控制器(11)的电气接口(12)中的网口连接;加速度传感器(2)和激光位移传感器(5)通过信号线与控制器(11)的电气接口(12)上的模拟输入接口连接;光栅尺(14)通过信号线与伺服驱动器(7)的模拟输入接口连接。
4.如权利要求3所述的扰动主动控制装置,其特征在于,摄像机(4)镜头与模拟贮箱(3)内液体液面齐平。
5.采用权利要求4所述的扰动主动控制装置的扰动试验方法,其特征在于,包括以下步骤:
6.如权利要求5所述的扰动试验方法,其特征在于,在步骤s2中,控制器(12)发送控制指令至伺服驱动器(7),伺服驱动器(7)将滚珠丝杠(13)运动至其中点位置,此时光电开关ⅱ(9)触发,触发后将相应信号反馈至伺服驱动器(7),伺服驱动器(7)及通过ethercat总线将该状态发送至控制器(12)。
7.如权利要求6所述的扰动试验方法,其特征在于,在步骤s5中,如选择为直线扰动模式,则先设定目标位置及速度,然后启动扰动模式,加速度传感器(2)测量过载值,光栅尺(14)和激光位移传感器(5)测量当前位置,最后判断当前位置是否达标。
8.如权利要求6所述的扰动试验方法,其特征在于,在步骤s5中,如选择为正弦周期扰动模式,则先设定幅值及频率,然后启动扰动模式,加速度传感器(2)测量过载值,光栅尺(14)和激光位移传感器(5)测量当前位置,最后判断周期是否达标。
9.如权利要求7或8所述的扰动试验方法,其特征在于,在步骤s6中,如不达标,返回相应扰动模式中,再次重新启动扰动模式,继续后续步骤,直至达标。
10.如权利要求9所述的扰动试验方法,其特征在于,在控制器(11)内设置扰动运动轨迹曲线,启动后,控制器(11)下发控制指令至伺服驱动器(7),伺服驱动器(7)按照指令控制伺服电机(1)转动,伺服电机(1)带动滚珠丝杠(13)转动,使得模拟贮箱安装转接板(15)上的模拟贮箱(3)进行直线运动;光栅尺(14)将模拟贮箱(3)运动位置反馈至伺服驱动器(7),激光位移传感器(5)将模拟贮箱(3)的运动位置反馈至控制器(11),加速度传感器(2)将模拟贮箱(3)过载反馈至控制器(11);伺服驱动器(7)和控制器(11)分别以光栅尺反馈值和激光位移反馈值进行闭环控制,直至扰动主动控制装置运动完成目标轨迹,同时摄像机(4)记录全程扰动下的液体贮箱(3)内液体图像。
技术总结
本发明涉及一种扰动主动控制装置,待测的模拟贮箱前侧设置有伺服驱动器,后侧设置有摄像机,左侧设置有激光位移传感器,右侧设置有伺服电机,模拟贮箱居中设置于装置安装板中央,伺服驱动器与摄像机关于模拟贮箱位置对称且均固定于装置安装板,激光位移传感器与伺服电机位置对称且均固定于装置安装板。该扰动主动控制装置采用电动伺服驱动,在地面液态晃动试验过程中,对被试液体贮箱施加精确的扰动力;通过位移传感器、光栅尺作为闭环控制反馈,通过闭环算法以及插补算法,提高位移以及扰动力控制精度;通过加速度传感器实时获取施加在液体贮箱上的干扰力,通过摄像机记录扰动力下液体液面的变化规律。
技术研发人员:高飞,丁可欣,芮鹏,王冲,王萌,王智勇,贺智国,高魁垠,韩丽
受保护的技术使用者:北京强度环境研究所
技术研发日:
技术公布日:2024/12/5
- 还没有人留言评论。精彩留言会获得点赞!