一种基于毫米波雷达点云占用栅格分析的两轮车入座检测方法与流程
本发明涉及毫米波雷达,具体涉及一种基于毫米波雷达点云占用栅格分析的两轮车入座检测方法。
背景技术:
1、近年来,随着城市化进程的加快以及交通拥堵问题的日益严重,两轮电动车作为一种绿色、便携的出行方式受到了广泛关注。
2、传统的二轮电动车需要用户采用钥匙或者按钮来手动控制电源上下电,这种方式存在着操作不够便捷、忘记下电造成电源浪费等问题。
3、近年来也兴起了基于压力传感器的入座、离座检测并启动或断开电动车动力的方法,但该类方案也存在以下缺点:a)其他杂物放置造成的误报,b)因路途颠簸而导致所测压力不稳。
4、作为一类常见的车载传感器,毫米波雷达具有体积小、动作检测灵敏、定向性好等优点。如何利用毫米波雷达实现两轮车的入座检测是需要解决的技术问题。
5、基于此,本发明设计了一种基于毫米波雷达点云占用栅格分析的两轮车入座检测方法以解决上述问题。
技术实现思路
1、针对现有技术所存在的上述缺点,本发明提供了一种基于毫米波雷达点云占用栅格分析的两轮车入座检测方法。
2、为实现以上目的,本发明通过以下技术方案予以实现:
3、一种基于毫米波雷达点云占用栅格分析的两轮车入座检测方法,包括以下步骤:
4、s1、首先,将毫米波雷达安装在两轮车坐垫下方的车座内部,用于检测回波信号及入座、离座的点云变化;
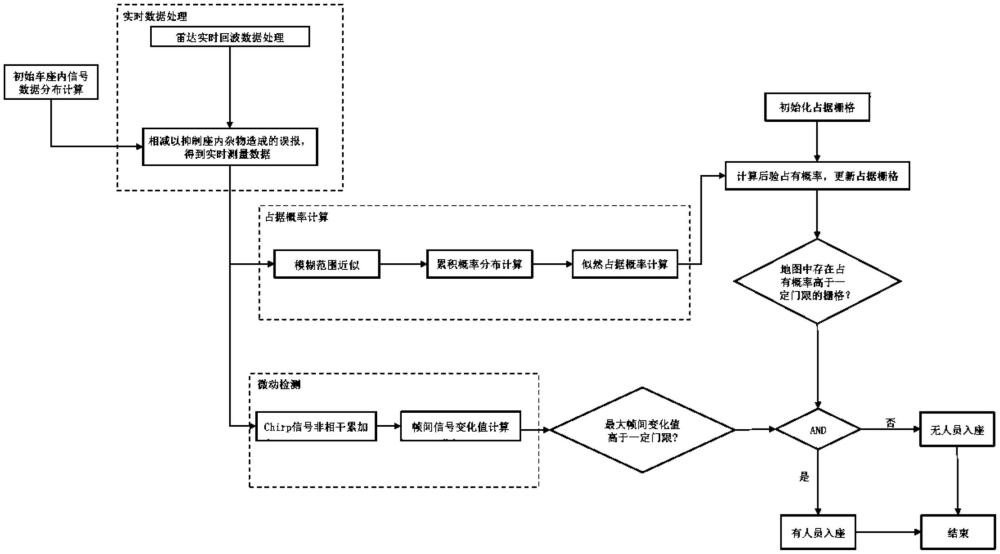
5、s2、初始车座内信号,在毫米波雷达上电后的初始n帧时间段内,对回波信号进行统计作为初始距离维1d-fft样本频谱;
6、s3、对毫米波雷达的实时回波信号进行数据分布计算;
7、s4、占据概率计算:依据每个点的距离测量值以及角度测量值计算得到测量点所附带的似然占据概率;
8、s5、更新占据栅格;
9、s6、微动检测;
10、s7、最终判断当前有人入座时,二轮车上电;判断离座时,二轮车电源断开。
11、更进一步的,步骤s2的具体步骤为:
12、2.1、对回波信号adc进行一维快速傅里叶变换(1d-fft)处理,得到车座内场景对应的距离维1d-fft频谱;
13、2.2、对上述频谱数据进行累计,并在累计至第n帧时,计算初始前n帧的频谱数据平均值,作为初始距离维1d-fft样本频谱;
14、2.3、占据栅格初始化:以毫米波雷达的安装位置为零点,将坐垫区域对应的平面范围离散化为(width/grid_size,length/grid_size)的二维栅格地图,并初始化占据栅格中每个单元格占有概率为0.5。
15、更进一步的,步骤s3的具体步骤为:
16、3.1、对毫米波雷达的实时回波信号adc进行一维快速傅里叶变换处理,得到实时距离维1d-fft频谱,并基于结果进行二维快速傅里叶变换处理,得到距离-速度维的频谱;
17、3.2、将实时距离维1d-fft频谱与初始距离维1d-fft样本频谱相减处理,得到差异1d-fft频谱,实现去除初始场景信号数据影响;
18、3.3、在差异1d-fft频谱上进行二维快速傅里叶变换处理,得到距离-速度维频谱;
19、3.4、在距离-速度维频谱上做恒虚警处理(cfar),过滤噪声,得到当前帧点云以及对应的距离测量值、多普勒测量值与角度测量值,并计算对应的信噪比;
20、3.5、从信噪比推导得出每个测量点的真实存在概率,公式为:
21、det_prob=false_alarm_rate^(1.0/(1.0+snr))
22、其中,false_alarm_rate指雷达的误报率,由前期测试评估得到,det_prob指测量点真实存在的概率,snr指信噪比。
23、更进一步的,步骤s4的具体步骤为:
24、4.1、模糊范围近似
25、首先分别模拟距离测量和角度测量的模糊性,对于每个点的测量值,选取范围delta作为模糊区域,将该范围映射到二维栅格地图中,与测量点距离最近的栅格顶点共同构成模糊范围的三角形,记录每个范围三角形顶点的距离与角度的最大值与最小值;
26、4.2、对于每个测量点,以距离或角度测量值为均值,以雷达距离或角度先验测量精度为方差,构建正态分布,并以此计算距离或角度累计概率分布,根据距离或角度测量值在范围内的相对位置,得到累计概率分布上对应的概率值,经过测量点真实存在概率det_prob矫正后得到距离或角度维度的占据概率值;
27、4.3、将所得的距离占据概率值以及角度占据概率值相乘,作为该测量点所附带的似然占据概率。
28、更进一步的,步骤s5的具体步骤为:
29、5.1、循环遍历栅格中各个单元格,若单元格中存在测量点,则进行5.2的计算;
30、5.2、采用公式一将二值贝叶斯滤波将入座与离座的二值问题连续化为时序上的置信度计算,避免概率值在0,1处截断;
31、
32、其中,p(x|zt)代表该单元格内的测量点所带的似然占据概率,lt代表当前帧的该单元格被占据的置信度,lt-1代表上一帧计算所得到的单元格被占据置信度。
33、更进一步的,步骤s6的具体步骤为:
34、6.1、对回波信号adc进行快速傅里叶变换处理,得到距离维度的复数fft数据,将一个通道内单帧多chirp的复数距离维fft矩阵非相干累加,得到单帧加和值矩阵;
35、6.2、计算帧与帧之间加和值矩阵的变化值,并在坐垫区域距离范围内寻找变化值的最大值,若该最大值高于设定门限a,则表征在坐垫范围内存在动作。
36、更进一步的,步骤s5中,根据二值贝叶斯滤波原理,根据各个测量点的似然占据概率,更新所在单元格的占有概率。
37、更进一步的,步骤s7中,判断是否同时符合以下两个条件:
38、a)占据栅格内存在占据置信度高于一定门限的单元格;
39、b)微动检测中帧与帧之间加和值矩阵的变化值高于设定门限a;
40、若是,则判断当前有人入座,二轮车上电;
41、若否,则判断离座,二轮车电源断开。
42、本发明相较于现有技术,其有益效果为:
43、本发明充分利用了毫米波雷达对微动灵敏的特点,解决压力传感器人、物不分的痛点问题;
44、本发明采用成本较低的毫米波雷达,用于检测由于入座座位形变所造成的点云,且引入了占据栅格,使得入座、离座的二值检测更加稳定。
技术特征:
1.一种基于毫米波雷达点云占用栅格分析的两轮车入座检测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于毫米波雷达点云占用栅格分析的两轮车入座检测方法,其特征在于,步骤s2的具体步骤为:
3.根据权利要求2所述的基于毫米波雷达点云占用栅格分析的两轮车入座检测方法,其特征在于,步骤s3的具体步骤为:
4.根据权利要求3所述的基于毫米波雷达点云占用栅格分析的两轮车入座检测方法,其特征在于,步骤s4的具体步骤为:
5.根据权利要求4所述的基于毫米波雷达点云占用栅格分析的两轮车入座检测方法,其特征在于,步骤s5的具体步骤为:
6.根据权利要求5所述的基于毫米波雷达点云占用栅格分析的两轮车入座检测方法,其特征在于,步骤s6的具体步骤为:
7.根据权利要求6所述的基于毫米波雷达点云占用栅格分析的两轮车入座检测方法,其特征在于,步骤s5中,根据二值贝叶斯滤波原理,根据各个测量点的似然占据概率,更新所在单元格的占有概率。
8.根据权利要求7所述的基于毫米波雷达点云占用栅格分析的两轮车入座检测方法,其特征在于,步骤s7中,判断是否同时符合以下两个条件:
技术总结
本发明公开了一种基于毫米波雷达点云占用栅格分析的两轮车入座检测方法,属于毫米波雷达技术领域,包括以下步骤:初始车座内信号;S3、对毫米波雷达的实时回波信号进行数据分布计算;S4、占据概率计算;S5、更新占据栅格;S6、微动检测;S7、最终判断当前有人入座时,二轮车上电;判断离座时,二轮车电源断开。通过上述方式,本发明充分利用了毫米波雷达对微动灵敏的特点,解决压力传感器人、物不分的痛点问题;本发明采用成本较低的毫米波雷达,用于检测由于入座座位形变所造成的点云,且引入了占据栅格,使得入座、离座的二值检测更加稳定。
技术研发人员:黄颖涵,丁一,蔡铭,江珊
受保护的技术使用者:复睿智行智能科技(上海)有限公司
技术研发日:
技术公布日:2024/11/21
- 还没有人留言评论。精彩留言会获得点赞!