本发明涉及智能驾驶定位,尤其涉及一种行车定位多传感器数据诊断方法、装置、设备及介质。
背景技术:
1、在自动驾驶领域中,基于高精地图的高精定位功能是l3+高阶智驾的标配产品,为自动驾驶车辆提供高精度定位功能,为规划控制,融合预测等提供强有力支撑。而在实际应用过程中,传感器数据的输入信号会由于环境影响导致全球导航卫星系统(globalnavigation satellite system,gnss)数据异常、感知算法能力导致感知结果异常、高精地图数据更新不及时导致地图数据异常,这些异常信息的接入从而导致定位功能无法实现高精度定位结果输出。在高速、城市快速路场景中,稳健的传感器输入是高精定位提前保障,如何准确及时发现异常数据并做出隔离,并输出正确的状态位是至关重要的事。
技术实现思路
1、本发明实施例提供了一种行车定位多传感器数据诊断方法、装置、设备及介质,实现了多传感器数据质量诊断功能。
2、第一方面,本发明实施例提供了一种行车定位多传感器数据诊断方法,包括:
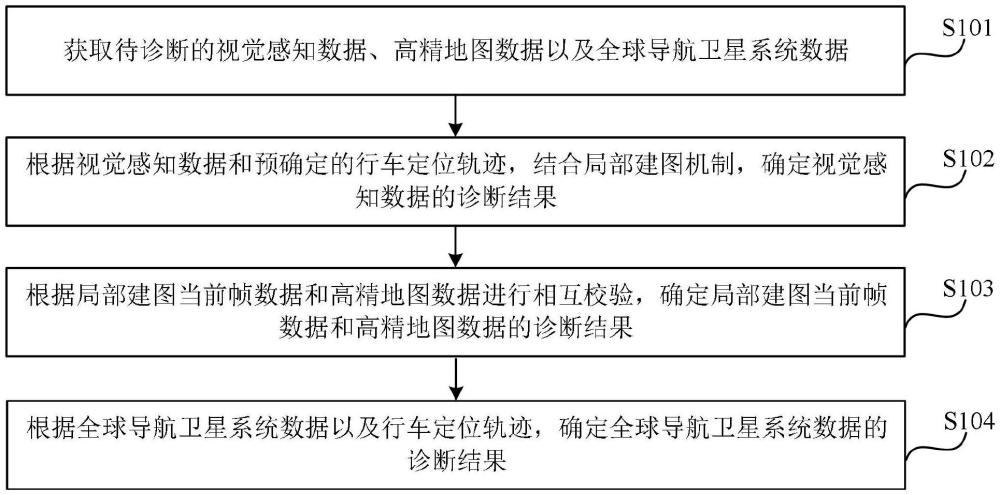
3、获取待诊断的视觉感知数据、高精地图数据以及全球导航卫星系统数据;
4、根据所述视觉感知数据和预确定的行车定位轨迹,结合局部建图机制,确定所述视觉感知数据的诊断结果,所述视觉感知数据的诊断结果包括异常隔离数据、暂存元素数据和锁定元素数据,所述暂存元素数据和锁定元素数据作为局部建图当前帧数据;
5、根据所述局部建图当前帧数据和所述高精地图数据进行相互校验,确定所述局部建图当前帧数据和所述高精地图数据的诊断结果;
6、根据所述全球导航卫星系统数据以及所述行车定位轨迹,确定所述全球导航卫星系统数据的诊断结果。
7、第二方面,本发明实施例提供了一种行车定位多传感器数据诊断装置,包括:
8、数据获取模块,用于获取待诊断的视觉感知数据、高精地图数据以及全球导航卫星系统数据;
9、第一诊断模块,用于根据所述视觉感知数据和预确定的行车定位轨迹,结合局部建图机制,确定所述视觉感知数据的诊断结果,所述视觉感知数据的诊断结果包括异常隔离数据、暂存元素数据和锁定元素数据,所述暂存元素数据和锁定元素数据作为局部建图当前帧数据;
10、第二诊断模块,用于根据所述局部建图当前帧数据和所述高精地图数据进行相互校验,确定所述局部建图当前帧数据和所述高精地图数据的诊断结果;
11、第三诊断模块,用于根据所述全球导航卫星系统数据以及所述行车定位轨迹,确定所述全球导航卫星系统数据的诊断结果。
12、第三方面,本发明实施例还提供一种电子设备,包括:
13、至少一个处理器;以及
14、与所述至少一个处理器通信连接的存储器;其中,
15、所述存储器存储有可被所述至少一个处理器执行的计算机程序,所述计算机程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行如第一方面实施例所述的行车定位多传感器数据诊断方法。
16、第四方面,本发明实施例还提供一种包含计算机可执行指令的存储介质,所述计算机可执行指令在由计算机处理器执行时用于执行如第一方面实施例所述的行车定位多传感器数据诊断方法。
17、本发明实施例提供了一种行车定位多传感器数据诊断方法、装置、设备及介质,该方法包括:获取待诊断的视觉感知数据、高精地图数据以及全球导航卫星系统数据;根据所述视觉感知数据和预确定的行车定位轨迹,结合局部建图机制,确定所述视觉感知数据的诊断结果,所述视觉感知数据的诊断结果包括异常隔离数据、暂存元素数据和锁定元素数据,所述暂存元素数据和锁定元素数据作为局部建图当前帧数据;根据所述局部建图当前帧数据和所述高精地图数据进行相互校验,确定所述局部建图当前帧数据和所述高精地图数据的诊断结果;根据所述全球导航卫星系统数据以及所述行车定位轨迹,确定所述全球导航卫星系统数据的诊断结果。上述技术方案,通过引入局部建图功能,构建局部感知地图剔除异常视觉感知数据;结合局部建图数据判断更新不及时的高精地图数据,以及进行局部建图当前帧数据和高精地图数据进行相互校验;通过预确定的行车定位轨迹结合gnss状态,检测gnss数据质量,实现了多传感器数据质量诊断功能。
18、应当理解,本部分所描述的内容并非旨在标识本发明的实施例的关键或重要特征,也不用于限制本发明的范围。本发明的其它特征将通过以下的说明书而变得容易理解。
技术特征:1.一种行车定位多传感器数据诊断方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述视觉感知数据和预确定的行车定位轨迹,结合局部建图机制,确定所述视觉感知数据的诊断结果,包括:
3.根据权利要求2所述的方法,其特征在于,所述基于类型与距离,对包含有全局定位位姿的视觉感知数据与局部建图进行配准,确定所述视觉感知数据的诊断结果,包括:
4.根据权利要求1所述的方法,其特征在于,所述行车定位轨迹的确定步骤,包括:
5.根据权利要求1所述的方法,其特征在于,所述根据所述局部建图当前帧数据和所述高精地图数据进行相互校验,确定所述局部建图当前帧数据和所述高精地图数据的诊断结果,包括:
6.根据权利要求5所述的方法,其特征在于,所述将各所述待匹配元素数据和所述高精地图数据进行类型和距离的匹配,获得初始匹配结果,包括:
7.根据权利要求5所述的方法,其特征在于,所述对所述待匹配元素数据和所述高精地图数据进行完整性校验,确定所述局部建图当前帧数据和所述高精地图数据的诊断结果,包括:
8.根据权利要求1所述的方法,其特征在于,所述根据所述全球导航卫星系统数据以及所述行车定位轨迹,确定所述全球导航卫星系统数据的诊断结果,包括:
9.根据权利要求1所述的方法,其特征在于,在所述根据所述全球导航卫星系统数据以及所述行车定位轨迹,确定所述全球导航卫星系统数据的诊断结果之前,还包括:
10.一种行车定位多传感器数据诊断装置,其特征在于,包括:
11.一种电子设备,其特征在于,包括:
12.一种包含计算机可执行指令的存储介质,其特征在于,所述计算机可执行指令在由计算机处理器执行时用于执行如权利要求1-9任一项所述的行车定位多传感器数据诊断方法。
技术总结本发明实施例提供了一种行车定位多传感器数据诊断方法、装置、设备及介质,该方法包括:获取待诊断的视觉感知数据、高精地图数据以及全球导航卫星系统数据;根据视觉感知数据和预确定的行车定位轨迹,结合局部建图机制,确定视觉感知数据的诊断结果;根据局部建图当前帧数据和高精地图数据进行相互校验,确定局部建图当前帧数据和高精地图数据的诊断结果;根据全球导航卫星系统数据以及行车定位轨迹,确定全球导航卫星系统数据的诊断结果。通过引入局部建图功能,构建局部感知地图剔除异常视觉感知数据;结合局部建图数据判断更新不及时的高精地图数据;通过预确定的行车定位轨迹结合GNSS状态,检测GNSS数据质量,实现了多传感器数据质量诊断功能。
技术研发人员:顾帅,吴继超,郭毅,戴雨露
受保护的技术使用者:中国第一汽车股份有限公司
技术研发日:技术公布日:2024/11/14