基于无人机影像的高精度地质形变监测方法及设备
本发明属于遥感测绘,具体涉及一种基于两期无人机影像的高精度地质形变监测方法。
背景技术:
1、由地质形变引发的地质灾害对国家和人民的生命财产安全构成了严重威胁,开展有效的形变监测具有极其重要的意义。传统手段一般采取人工实地调查的方式,水准测量是一种形变监测精度较高的方法,被广泛应用于地表形变、建筑物形变等工程形变监测,但劳动强度较大,经济成本较高,此外,还可以通过布设gnss监测点来实现形变监测。这种方法虽然监测精度高、时间采样率快,但是只能监测在某些点位上的形变情况,空间分辨率很低,不能反映整体的形变;近年来,insar 技术在形变监测领域呈现出了井喷式的发展,已逐步成为了形变监测领域的常用手段之一。然而,受限于sar 成像几何和微波电磁特性的影响,即使利用新一代 sar 卫星开展监测,地形起伏导致的几何畸变、密集植被覆盖产生的失相关噪声、水汽变化引起的大气延迟误差等因素依然制约着insar 技术在形变监测领域的应用。lidar 技术可以直接获取三维点云数据,在各种高陡边坡、危岩体等复杂地形地貌环境下,具有高分辨率、高精度及高效的特点。在有植被覆盖的区域可获取植被下地形,已成为生产高精度数字高程模型(dem)的主要手段,但是,在高海拔、沟壑纵横的复杂地形地貌环境下,机载lidar在飞行中时常会发生 gnss 信号中断而无法持续安全飞行的问题;另一方面,由于轻小型无人机载 lidar扫描角度和测距精度受限,在高差大、边坡陡且形态复杂的区域采集数据时,会存在部分高陡边坡点云数据缺失的问题。综合来看。虽然以上这些方法经过无数科研工作者努力,已发展较为成熟,但还存在各种各样的问题,无法满足当前地质灾害监测的需求和要求。随着无人机技术发展,可以灵活方便的获取时序化高分辨率影像,为地质形变有效监测提供了一种解决途径。使用无人机开展地质形变监测的主要过程是首先在地面布设一定数量分布均匀的控制点,使用无人机按一定时间间隔对目标区域开展摄影获取多期次影像,并且进行带控制点的空中三角测量,然后生产多期次精细三维模型,通过比对差异发现形变。然而在容易发生地质灾害的区域往往地形复杂,一方面不方便架设测量设备,布设控制点存在很大困难, 另一方面由于地表可能发生形变,无法确认两期控制点是否固定不变。此外,若每次进行无人机进行摄影测量时都重新量测控制点,将会消耗大量人力和时间,效率低下。因此,传统无人机摄影测量方式也不适用于滑坡等容易发生地质形变的区域,必须寻求新方法解决这一问题。
技术实现思路
1、针对上述技术问题,本发明介绍了一种无需地面控制点的基于两期无人机影像形变监测技术方案。
2、本发明提供一种基于无人机影像的高精度地质形变监测方法,包括以下过程,
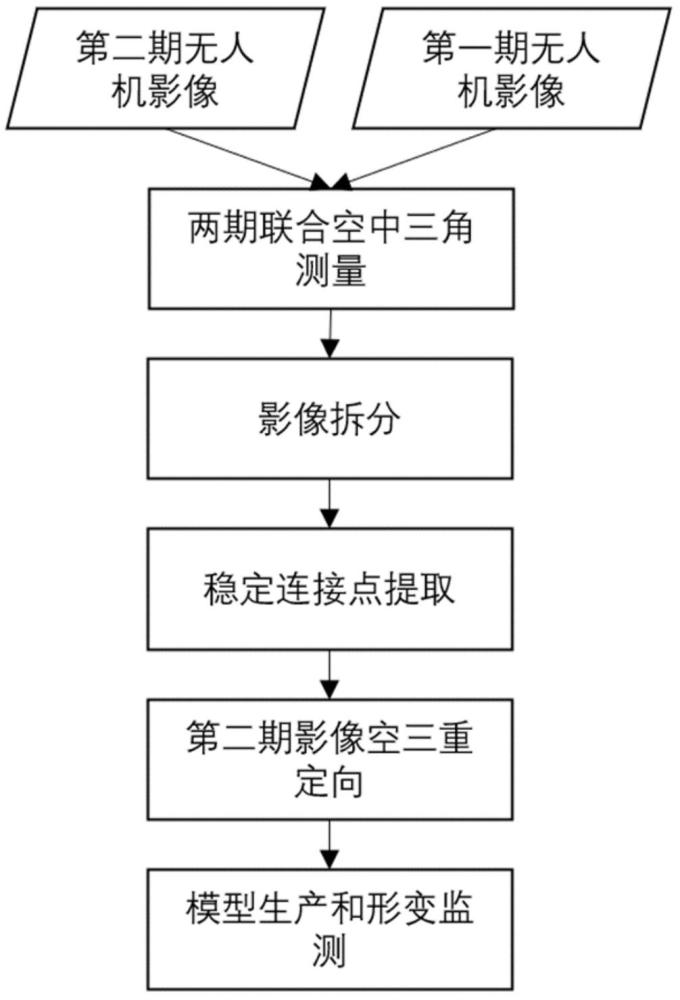
3、将来自无人机的两期影像合并进行光束法区域网平差,得到共同的连接点以及对应的物方坐标;
4、将两期影像拆分并分别处理,对第一期影像重新平差,将与合并处理变化最小的连接点提取为稳定区域连接点,并作为第二期影像的控制信息进行光束法平差,使其与第一期影像配准;
5、使用配准的两期影像建立三维模型以及数字表面模型dsm,并分别进行差分分析,得到地质形变信息。
6、而且,将两期影像合并进行光束法区域网平差得到共同的连接点时,实现方式为,将来自不同时期的两组影像合并处理,进行无地面控制点的联合空中三角测量,得到两期影像的外方位元素和影像连接点信息,将联合处理的影像按照拍摄时间拆分为两个独立项目,同时保留各自的连接点信息,提取第一期和第二期共有的连接点。
7、而且,所述提取第一期和第二期共有的连接点,实现方式如下,
8、将合并空中三角测量后的项目复制两份,第一个份删去第二期影像及连接点,第二份删去第一期影像及连接点;
9、对两个项目中的连接点进行筛选,若一个连接点在第一期影像和第二期影像中都包含则保留,若连接点仅存在于单期影像中则删除,最后得到两期影像的共有连接点信息。
10、而且,提取稳定区域连接点的实现方式如下,
11、基于第一期影像在没有地面控制点的情况下进行单独的空中三角测量,更新影像的外方位参数及连接点信息;
12、将所得新的连接点与来自两期空中三角测量的第一期连接点进行比较,提取同名连接点;
13、将第二期影像中对应连接点的三维坐标替换为第一期影像中的三维坐标,得到以第一期影像为参考基准的稳定区域连接点。
14、而且,取同名连接点的实现方式如下,
15、将所得新的连接点与来自两期空中三角测量的第一期连接点进行比较,认为图像间坐标差异低于相应阈值a的连接点为同名连接点,并且每个连接点在第一期和第二期的至少b张影像中存在投影;
16、选定的连接点被相应标记为,并根据欧式距离进行排名,保留距离最小的前c%的连接点,将其余的舍去,其中,a、b和c为预设的阈值。
17、而且,将识别出的稳定区域连接点进一步进行抽稀处理,并作为控制点,对第二期影像进行空中三角测量,更新影像的外方位元素。
18、而且,用于在没有地面控制点的条件下实现高精度地表形变监测。
19、另一方面,本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上所述基于无人机影像的高精度地质形变监测方法。
20、另一方面,本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如上所述基于无人机影像的高精度地质形变监测方法。
21、另一方面,本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现上所述基于无人机影像的高精度地质形变监测方法。
22、综上所述,本发明提出了一种无需地面控制点的基于两期无人机影像形变监测方法,该发明将两期无人机影像联合进行空中三角测量,从第一期影像中提取稳定不变的区域,并作为第二期数据的控制信息,能够在没有地面控制点的条件下实现高精度地表形变监测,高程变化监测精度可达到厘米级。与现有技术相比,本发明具有如下优点:在易发生自然地质灾害的地区,难以布设永久地面控制点,本发明无需在地面布设人工控制点,避免了大量外业工作,极大提高了安全性和形变监测的效率,能在短时间内响应;本发明的监测精度与传统不使用地面控制点的方法相比精度提高了十倍,与使用大量地面控制点的精度相当,能够达到厘米级;并且本发明能获取监测区域的三维面状变化信息,能够全面获取监测区域的高精度形变数据。
技术特征:
1.一种基于无人机影像的高精度地质形变监测方法,其特征在于:包括以下过程,
2.如权利要求1所述的一种基于无人机影像的高精度地质形变监测方法,其特征在于:将两期影像合并进行光束法区域网平差得到共同的连接点时,实现方式为,将来自不同时期的两组影像合并处理,进行无地面控制点的联合空中三角测量,得到两期影像的外方位元素和影像连接点信息,将联合处理的影像按照拍摄时间拆分为两个独立项目,同时保留各自的连接点信息,提取第一期和第二期共有的连接点。
3.如权利要求2所述的一种基于无人机影像的高精度地质形变监测方法,其特征在于:所述提取第一期和第二期共有的连接点,实现方式如下,
4.如权利要求1所述的一种基于无人机影像的高精度地质形变监测方法,其特征在于:提取稳定区域连接点的实现方式如下,
5.如权利要求4所述的一种基于无人机影像的高精度地质形变监测方法,其特征在于:取同名连接点的实现方式如下,
6.如权利要求1所述的一种基于无人机影像的高精度地质形变监测方法,其特征在于:将识别出的稳定区域连接点进一步进行抽稀处理,并作为控制点,对第二期影像进行空中三角测量,更新影像的外方位元素。
7.如权利要求1或2或3或4或5或6所述的一种基于无人机影像的高精度地质形变监测方法,其特征在于:用于在没有地面控制点的条件下实现高精度地表形变监测。
8.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于:所述处理器执行所述程序时实现如权利要求1至7任一项所述基于无人机影像的高精度地质形变监测方法。
9.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1至7任一项所述基于无人机影像的高精度地质形变监测方法。
10.一种计算机程序产品,包括计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1至7任一项所述基于无人机影像的高精度地质形变监测方法。
技术总结
本发明提供一种基于无人机影像的高精度地质形变监测方法及设备,包括将来自无人机的两期影像合并进行光束法区域网平差,得到共同的连接点以及对应的物方坐标;将两期影像拆分并分别处理,对第一期影像重新平差,将与合并处理变化最小的连接点提取为稳定区域连接点,并作为第二期影像的控制信息进行光束法平差,使其与第一期影像配准;使用配准的两期影像建立三维模型以及数字表面模型DSM,并分别进行差分分析,得到地质形变信息。本发明能够用于在没有地面控制点的条件下实现高精度地表形变监测。
技术研发人员:段延松,覃磊,刘亚文
受保护的技术使用者:武汉大学
技术研发日:
技术公布日:2025/2/24
- 还没有人留言评论。精彩留言会获得点赞!