一种感知机器人指甲法向力的压力检测组件、仿生指的制作方法
本发明涉及家庭服务机器人,尤其是一种感知机器人指甲法向力的压力检测组件、仿生指。
背景技术:
1、家庭服务机器人是一种在家居环境或类似环境中能够执行各种服务任务的拟人形机器人设备,目前市场需求越发激烈。相对于传统机械臂出于为工业制造服务而言,家庭服务机器人偏向于在家居环境作为生活助手或管家角色提供日常生活服务类型。
2、指甲作为人体手指的重要组成,帮助人们完成诸如挠、抠、戳、弹各类任务。对家庭服务机器人而言,机器人躯体表面通常包裹柔性电子皮肤提供触觉感知输入,因而,手指配备人工指甲将更有利于完成挠、抠、戳、弹等动作任务,并且人工指甲配合柔性电子皮肤形成的指腹也有利于对微小物体的抓取,例如针,电子产品的螺丝、电话卡等。家庭服务机器人的手指配备人工指甲后,如何完成指甲的受力测量成为待需解决的设计难题,机器系统需要有能够感知诸如挠痒力度、弹指力度、戳东西力度等能力,以避免在家居服务任务对服务对象造成力的伤害。
3、六维力传感器作为一种同时检测3个力分量和3个力矩分量的力传感器,目前主要应用于工业机械臂或拟人机器人的肩关节、肘关节和/或腕关节等位置完成六维力感知,这些关节部位允许3个方向的活动自由度,同时能够提供足够大的空间放置六维力传感器从几十到几千个毫米不等的尺寸。六维力传感器的大小因品牌和型号而异,诸如美国at i微型六维力传感器的尺寸为φ1714.5(mm),德国me-system三维力/六维力传感器的外壳尺寸为29mmx27mm。相对于指甲的力和力矩的测量而言,使用六维力传感器检测指甲力学并不合适,一个方面的问题是指甲与手指之间没有足够空间,更重要的方面在于成本问题,目前六维力传感器的购买价格基本在10万元左右/个,高昂的传感器成本使得设计难以被市场接受。
4、专利文献jp2023073764a公开一种机器人系统,注意到了拟人机器人设置指甲对应用服务的重要性以及指甲受力测量的任务,文献中对于指甲受力的测量拟采用六维力传感器完成,基于上述理由,六维力传感器在指甲的安装和成本控制上难以实施,因此目前未见商业推广。
5、有基于此,如何低成本、可实施地测量家庭服务机器人的指甲的受力情况成为待解决课题。
技术实现思路
1、机器人末端指节只有一个方向上的自由度,末端指节围绕其端部关节形成手指弯曲动作,弯曲动作与指甲法向同向,对于诸如挠、抠等动作,指甲沿法向受到作用力,力的大小反作用接触对象,同时指甲产生转动,一般采用力矩评价物体转动的相互作用,因此,本发明目的之一在于实现机器人指甲法向的作用力和力矩的感知。
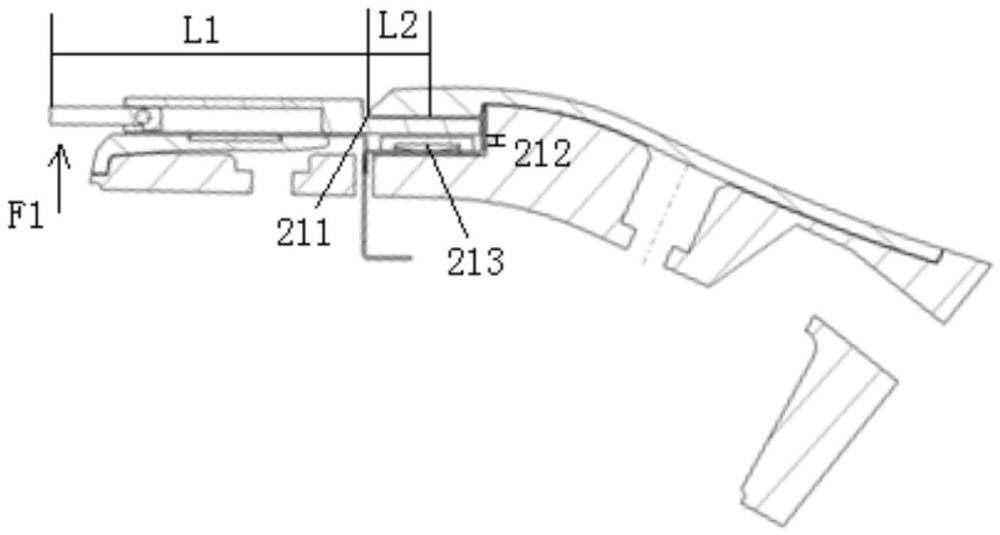
2、为此,提供一种感知机器人指甲法向力的压力检测组件,包括末端指节、人工指甲、处理模块;人工指甲安装在末端指节上,指甲的刚度设置在2莫氏以上,指甲前缘朝外延伸出指节指尖作为第一受力区来与外部物体物理接触;末端指节设置有作用于人工指甲的第一支点,在第一受力区受指甲法向力作用下,人工指甲受第一支点支撑产生第一转动位移,至少一个按压后具有自主弹性恢复的第一压力传感器被固定于第一转动位移的行进路径上用以检测第一单维力,压力传感器的外径尺寸配置为至多到指甲的最大尺寸的100%;处理模块与第一压力传感器耦合,用于依据第一单维力及相应力臂,输出作用于第一受力区所受法向力和/或力矩。第一受力区受法向力绕第一支点产生转动,第一压力传感器检测指甲转动对其产生的第一单维力f2,结构固定后动力臂l1、阻力臂l2已知,通过指甲受力f1*力臂l1=指甲给压力传感器的力f2*力臂l2,处理模块依据第一单维力及相应力臂输出作用于第一受力区所受法向力和/或力矩。末端指节只有弯曲方向上的一个自由度,利用转动位移上的一个力传感器配合指甲拟人伸出指甲即可实现作用力大小和力矩两项测量,满足指甲法向力及力矩测量要求。
3、作为一种改进,指甲前缘朝外伸出距离指尖的距离为指甲本体的5%-50%。
4、作为另一种改进,第一受力区到第一支点的动力臂、第一压力传感器到第一支点的阻力臂位于第一支点两侧或同侧;或者,第一压力传感器置于人工指甲的上方和/或下方。
5、作为另一种改进,第一支点支撑于指甲根部和前缘之间的上表面,指甲前缘的底部作为第一受力区来接触外部物体产生正法向力,第一压力传感器固定于指甲根部的下方空间。进一步,指甲前缘朝下倾斜形成与延伸方向的偏移。进一步,人工指甲外露于末端指节的上表面作为与外部物体接触的第二受力区;至少一个按压后具有自主弹性恢复的第二压力传感器布置于指甲的第二受力区下方承载指甲,第二压力传感器用以检测第二单维力;处理模块与第二压力传感器耦合,用于依据第二单维力输出作用于第二受力区所受的负法向力。进一步,第一压力传感器与第二压力传感器共同位于人工指甲的底面作为承载。进一步,末端指节设有开槽容置指甲根部;开槽的内侧壁顶面与第一压力传感器共同形成对指甲根部的夹持;开槽的槽口上边沿复用作第一支点。
6、作为另一种改进,压力检测组件包括电容数字转换电路和多个感应电极;多个感应电极形成电极点阵,用于感应物体向受力区的接近和/或在受力区上的接触情况;电容数字转换电路耦合电极点阵中的各个感应电极以获取自电容和/或互电容;处理模块耦合电容数字转换电路,用于依据自电容和/或互电容输出感知外部物体接近的电信号和/或输出作用于受力区的受力点位置和/或受力面积。
7、作为另一种改进,指甲前缘的端部作为与外部物体接触的第三受力区;人工指甲沿指尖方向滑动连接于末端指节,人工指甲在第三受力区受力下产生朝向指节滑动,至少一个按压后具有自主弹性恢复的第三压力传感器被固定于滑动路径上用以检测第三单维力;处理模块与第三压力传感器耦合,用于依据第三单维力输出第三受力区所受的作用力。
8、作为另一种改进,人工指甲包括本体,指甲前缘可活动伸缩地设置于本体前端;压力检测组件设置有驱动指甲前缘伸出或缩回本体的致动装置。
9、作为另一种改进,压力传感器配置为单维力传感器;或者,压力传感器包括柔性体,柔性体内部设置有上层电极,上层电极为曲面弹性电极,上层电极的下方设置有一个或多个下层电极,上层电极的底面和/或下层电极顶面设置绝缘层,上层电极相对下层电极的投影至少覆盖下层电极的部分面积,柔性体受外力形变带动上层电极改变对下层电极的间接接触面积,压力检测组件包括电容数字转换电路,电容数字转换电路耦合各个上层电极与下层电极,处理模块耦合电容数字转换电路。
10、还提供一种仿生指,包括上述的压力检测组件。
技术特征:
1.一种感知机器人指甲法向力的压力检测组件,其特征在于:
2.根据权利要求1所述的压力检测组件,其特征在于:指甲前缘朝外伸出距离指尖的距离为指甲本体的5%-50%。
3.根据权利要求1所述的压力检测组件,其特征在于:
4.根据权利要求1所述的压力检测组件,其特征在于:
5.根据权利要求4所述的压力检测组件,其特征在于:指甲前缘朝下倾斜形成与延伸方向的偏移。
6.根据权利要求4所述的压力检测组件,其特征在于:
7.根据权利要求6所述的压力检测组件,其特征在于:
8.根据权利要求7所述的压力检测组件,其特征在于:
9.根据权利要求1所述的压力检测组件,其特征在于:
10.根据权利要求1所述的压力检测组件,其特征在于:
11.根据权利要求1所述的压力检测组件,其特征在于:
12.根据权利要求1所述的压力检测组件,其特征在于:
13.一种仿生指,其特征在于,包括权利要求1-12任一项所述的压力检测组件。
技术总结
本发明涉及一种感知机器人指甲法向力的压力检测组件、仿生指,包括末端指节、人工指甲、处理模块;人工指甲装在末端指节,刚度2莫氏以上,指甲前缘朝外延伸出指节指尖作为第一受力区与外部物体物理接触;末端指节设置有作用于人工指甲的第一支点,在第一受力区受指甲法向力作用下,人工指甲受第一支点支撑产生第一转动位移,至少一个按压后具有自主弹性恢复的第一压力传感器被固定于第一转动位移的行进路径上用以检测第一单维力,压力传感器的外径尺寸配置为至多到指甲的最大尺寸的100%;处理模块与第一压力传感器耦合,用于依据第一单维力及相应力臂,输出作用于第一受力区所受法向力和/或力矩。
技术研发人员:孙滕谌,曾凡佑,董超
受保护的技术使用者:北京他山科技有限公司
技术研发日:
技术公布日:2024/11/21
- 还没有人留言评论。精彩留言会获得点赞!