一种低速风洞虚拟飞行试验支撑装置及试验系统的制作方法
本申请涉及风洞试验,尤其涉及一种低速风洞虚拟飞行试验支撑装置及试验系统。
背景技术:
1、低速风洞虚拟飞行试验技术是一种基于试验装置实现动力学相似缩比模型飞行验证的动态试验模拟技术,用于在低速风洞开展飞行器研发早期的气动验证与评估、飞行状态评价、失速模拟和过失速机动模拟等。
2、低速风洞虚拟飞试验装置作为虚拟飞行试验的基本设施,试验模型的动态调整能力非常重要。通常,低速风洞虚拟飞试验支撑装置采用虎克铰结构或采用球铰结构实现模型的组合转动。但是,无法模拟模型在较大俯仰角度时的气动特性、飞行状态评价。
技术实现思路
1、有鉴于此,本申请的目的是为了克服现有技术中的不足,提供一种低速风洞虚拟飞行试验支撑装置及低速风洞虚拟飞行试验系统,既能够在兼顾较小风洞空间,又能够保证结构强度,且减小了迎风面积,可以做到很小的堵塞度,保证试验的可靠性和准确性。
2、本申请提供如下技术方案:
3、第一方面,本申请实施例提供一种低速风洞虚拟飞行试验支撑装置,所述低速风洞虚拟飞行试验支撑装置包括:
4、n级移动模组,n为正整数,且n≥2;其中,第n-1级所述移动模组和第n级所述移动模组连接,第n级所述移动模组用于驱动第n-1级所述移动模组沿预设方向移动,且第1级所述移动模组和飞机模型连接,第1级所述移动模组用于驱动所述飞机模型沿所述预设方向移动,所述预设方向能够使所述飞机模型在多个俯仰姿态之间切换。
5、在第一方面的其中一些实施例中,所述预设方向具有依次设置的下降段和上升段,所述预设方向位于竖直面内。
6、在第一方面的其中一些实施例中,所述预设方向设置为弧形。
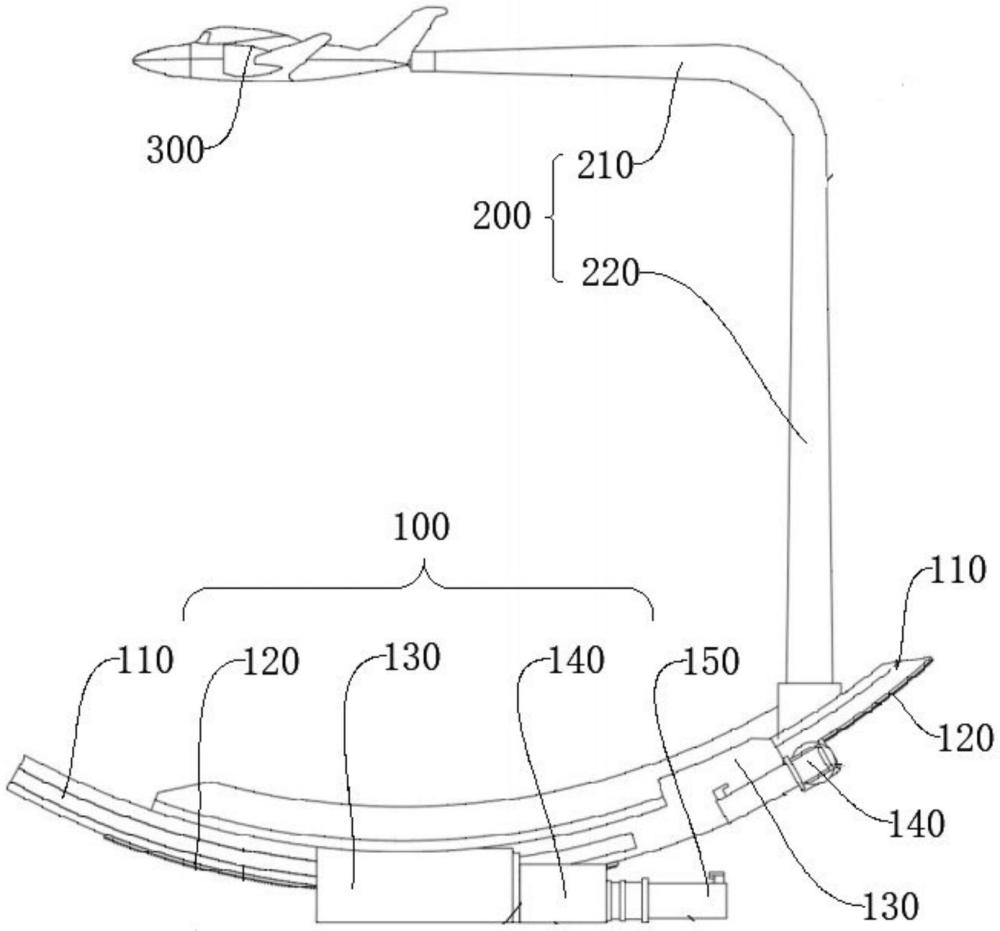
7、在第一方面的其中一些实施例中,所述移动模组包括:
8、导轨,所述导轨沿所述预设方向延伸设置;
9、滑块,所述滑块和所述导轨滑动连接;
10、齿条,所述齿条设置于所述导轨,且所述齿条沿所述预设方向延伸设置;
11、齿轮,所述齿轮和所述齿条啮合;
12、驱动部,所述驱动部和所述齿轮连接,所述驱动部用于驱动所述齿轮转动;
13、其中,第n-1级所述移动模组的所述驱动部和所述第n级所述移动模组的所述导轨连接。
14、在第一方面的其中一些实施例中,第n-1级所述移动模组的所述驱动部和所述第n级所述移动模组的所述导轨在风向的下游的一端连接。
15、在第一方面的其中一些实施例中,所述驱动部包括电机和减速器,所述电机的转轴和所述减速器的动力输入轴连接,所述减速器的动力输出轴与所述齿轮连接。
16、在第一方面的其中一些实施例中,所述驱动部和所述滑块连接。
17、在第一方面的其中一些实施例中,所述低速风洞虚拟飞行试验支撑装置还包括支撑杆,所述支撑杆具有依次连接的第一段和第二段,所述第一段和所述飞机模型连接,且所述第一段沿与所述飞机模型的纵轴平行的方向延伸设置,所述第二段和所述第一段垂直设置。
18、在第一方面的其中一些实施例中,所述第一段和所述飞机模型的尾端连接,且所述第一段沿所述纵轴延伸设置。
19、第二方面,本申请还提供一种低速风洞虚拟飞行试验系统,所述低速风洞虚拟飞行试验系统包括如上述实施例中任一项所述的低速风洞虚拟飞行试验支撑装置。
20、本申请的实施例具有如下优点:
21、本申请提供一种低速风洞虚拟飞行试验支撑装置,第n级移动模组与第n-1级移动模组相连,并且第n级移动模组能够驱动第n-1级移动模组沿预定方向移动。这样的设计使得整个系统更加灵活,可以实现复杂的运动模式。第1级移动模组直接与飞机模型连接,并负责驱动模型沿预设方向移动。需要说明的是,各个移动模组均能分别独立移动,也就是说,每个移动模组的移动均能带动飞机模型在预设方向的移动,进而实现大范围调整飞机模型的俯仰角度。并且,预设方向的选择使得飞机模型可以在不同的俯仰姿态之间切换,这对于评估不同飞行状态下的性能至关重要。显然,新的支撑装置设计考虑了风洞内部的空间限制,能够适应较小的风洞空间。其次,保证了结构的强度,使得装置能够在高应力条件下保持稳定。以及,降低了装置的迎风面积,减少了对气流的干扰,提高了测试数据的准确性。再者,由于设计上的优化,装置的堵塞度降低,确保了试验环境更加接近真实飞行条件。这种改进的支撑装置对于低速风洞虚拟飞行试验来说是一项重要的技术进步,有助于更准确地评估飞行器在各种飞行条件下的表现。
22、本申请还涉及一种低速风洞虚拟飞行试验系统,由于上述低速风洞虚拟飞行试验支撑装置具有上述技术效果,因此包括该低速风洞虚拟飞行试验支撑装置的低速风洞虚拟飞行试验系统应当具有相同的技术效果,在此不再赘述。
23、为使本发明的上述目的、特征和优点能更明显和易懂,下文特举较佳实施例,并配合所附附图,做详细说明如下。
技术特征:
1.一种低速风洞虚拟飞行试验支撑装置,其特征在于,所述低速风洞虚拟飞行试验支撑装置包括:
2.根据权利要求1所述的低速风洞虚拟飞行试验支撑装置,其特征在于,所述预设方向具有依次设置的下降段和上升段,所述预设方向位于竖直面内。
3.根据权利要求2所述的低速风洞虚拟飞行试验支撑装置,其特征在于,所述预设方向设置为弧形。
4.根据权利要求1所述的低速风洞虚拟飞行试验支撑装置,其特征在于,所述移动模组包括:
5.根据权利要求4所述的低速风洞虚拟飞行试验支撑装置,其特征在于,第n-1级所述移动模组的所述驱动部和所述第n级所述移动模组的所述导轨在风向的下游的一端连接。
6.根据权利要求4所述的低速风洞虚拟飞行试验支撑装置,其特征在于,所述驱动部包括电机和减速器,所述电机的转轴和所述减速器的动力输入轴连接,所述减速器的动力输出轴与所述齿轮连接。
7.根据权利要求6所述的低速风洞虚拟飞行试验支撑装置,其特征在于,所述驱动部和所述滑块连接。
8.根据权利要求1至7中任一项所述的低速风洞虚拟飞行试验支撑装置,其特征在于,所述低速风洞虚拟飞行试验支撑装置还包括支撑杆,所述支撑杆具有依次连接的第一段和第二段,所述第一段和所述飞机模型连接,且所述第一段沿与所述飞机模型的纵轴平行的方向延伸设置,所述第二段和所述第一段垂直设置。
9.根据权利要求8所述的低速风洞虚拟飞行试验支撑装置,其特征在于,所述第一段和所述飞机模型的尾端连接,且所述第一段沿所述纵轴延伸设置。
10.一种低速风洞虚拟飞行试验系统,其特征在于,所述低速风洞虚拟飞行试验系统包括如权利要求1至9中任一项所述的低速风洞虚拟飞行试验支撑装置。
技术总结
本申请提供一种低速风洞虚拟飞行试验支撑装置及试验系统,涉及风洞试验技术领域。该低速风洞虚拟飞行试验支撑装置包括N级移动模组,满足:N为正整数,且N≥2;其中,第N‑1级移动模组和第N级移动模组连接,第N级移动模组用于驱动第N‑1级移动模组沿预设方向移动,且第1级移动模组和飞机模型连接,第1级移动模组用于驱动飞机模型沿预设方向移动,预设方向能够使飞机模型在多个俯仰姿态之间切换。本申请既能够在兼顾较小风洞空间,又能够保证结构强度,且减小了迎风面积,可以做到很小的堵塞度,保证试验的可靠性和准确性。
技术研发人员:孙银生,苏丰睿,冷伦,乔高昆,房凯文,郭文利
受保护的技术使用者:郑州机械研究所有限公司
技术研发日:
技术公布日:2024/10/28
- 还没有人留言评论。精彩留言会获得点赞!