基于人工智能的自适应室内定位及路径优化方法
本发明涉及人工智能,具体为基于人工智能的自适应室内定位及路径优化方法。
背景技术:
1、随着科技的飞速发展,机器人在室内环境中的应用越来越广泛,从工业生产中的自动化搬运机器人到服务行业的引导机器人,再到家庭中的清洁机器人等,它们在不同的场景中发挥着重要作用,然而,要让这些机器人高效地完成任务,精准的室内定位和优化的路径规划是关键,在传统的室内定位方法在机器人应用中通常采用红外线或超声波的定位技术,在复杂的室内布局中,提供相对粗略的位置信息,因此需要基于人工智能的自适应室内定位及路径优化方法,来精确定位室内的位置以及对移动路径的规划。
2、但是在目前技术中,红外线或超声波的定位技术容易受到环境和障碍物干扰,其信号可能会被障碍物反射、吸收或散射,导致定位不准确,以及缺乏对动态环境的适应能力,影响机器人导航效率与任务执行成功率的问题。
技术实现思路
1、针对现有技术的不足,本发明提供了基于人工智能的自适应室内定位及路径优化方法,解决定位不准确,缺乏对动态环境的适应能力的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:基于人工智能的自适应室内定位及路径优化方法,包括以下步骤:
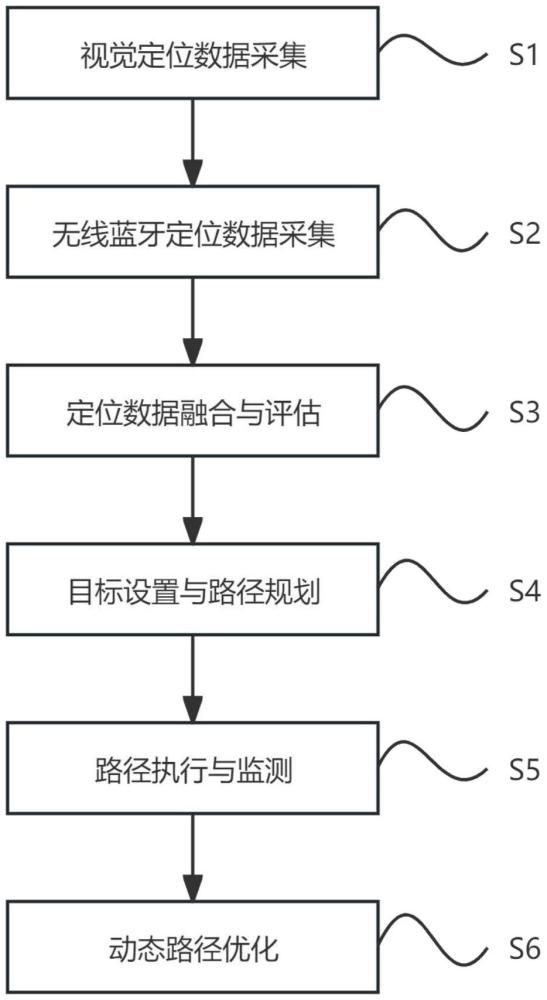
3、s1:视觉定位数据采集,部署摄像头的位置和角度,以覆盖室内区域,再实时采集室内环境的图像数据,通过视觉人工智能计算并确定目标物体以及其他障碍物体在图像中的位置,并将其转换为实际的坐标值;
4、s2:无线蓝牙定位数据采集,在室内设置多个蓝牙信标,而机器人通过接收蓝牙信标的信号,再通过测量信号强度、到达时间参数,计算目标物体与蓝牙信标之间的距离,并利用三角定位算法确定目标物体的位置,得出其坐标值;
5、s3:定位数据融合与评估,视觉定位数据与无线蓝牙定位数据进行匹配,判断其是否重合,若相匹配则进行绑定,可定位精确的目标位置,若否则重新对视觉定位与无线蓝牙定位的数据重新进行采集,直至位置相互匹配;
6、s4:目标设置与路径规划,确定目标位置,使用路径规划算法来计划一条从起点到目标点的路径,同时通过静止的障碍物进行计算出最优路径;
7、s5:路径执行与监测,执行机器人的对目标的运行路径,同时实时监测机器人的位置以及前方移动的障碍物;
8、s6:动态路径优化,在运行路径时,如果有人员走动阻挡机器人运行路径,机器人需要避开障碍物并重新规划路径。
9、优选的,所述s1中摄像头分为四个,对室内多个方向进行覆盖,且采集频率为每秒30-60帧,通过计算机以室内角落为中心计算出目标物体以及其他障碍物体在图像中的坐标值,所述坐标为直角坐标系。
10、优选的,所述s2室内蓝牙信标设置为三个记为a、b、c,所述机器人配备蓝牙接收器,可接收来自周围蓝牙信标的信号强度,通过室内角落为中心建立一个室内坐标系,所述三角定位算法包括三边测量法,机器人的位置坐标为(x,y)通过以下方程组求解:
11、(x-x1)2+(y-y1)2=d12
12、(x-x2)2+(y-y2)2=d22
13、(x-x3)2+(y-y3)2=d32
14、其中三个蓝牙信标a、b、c的距离分别为d1、d2、d3;
15、信标a、b、c的坐标分别为(x1,y1)、(x2,y2)、(x3,y3)。
16、优选的,所述s3中视觉定位数据与无线蓝牙定位的目标位置坐标为相同坐标系,其位置阈值为0.1—0.2米,若超过则不匹配,重新采集数据进行匹配,若其距离偏差在范围内则进行匹配绑定,为目标物体分配一个唯一的标识符,并将视觉定位和无线蓝牙定位的坐标值与该标识符关联起来。
17、优选的,所述s4中通过无线蓝牙与视觉信号获取信息辅助确认目标位置,通过a*算法计算最优路径,首先创建两个列表:开放列表和关闭列表,且将起点坐标加入开放列表,设置起点的g值为0,再计算起点到目标点的欧几里得距离作为启发函数值h,且其中两个节点为a(x1,y1)和b(x2,y2),路径搜索:通过之间坐标系中以目标位置的上下左右四个方向的相邻坐标节点进行扩展,且相邻节点是障碍物时则跳过,通过回溯,选择达到目标节点路径f最小的节点作为下一个要扩展的节点目标,f为启发函数值d与g值之和。
18、优选的,所述s5中将最优路径以坐标序列的形式输出,表示机器人依次经过的位置,同时通过摄像头实时监测移动障碍物。
19、优选的,所述s6中机器人的移动路径有新的障碍物,导致环境发生变化,重新运行a*路径规划算法,更新最优路径。
20、本发明提供了基于人工智能的自适应室内定位及路径优化方法。
21、具备以下有益效果:
22、1、本发明通过视觉人工智能与无线蓝牙定位相结合,来提高定位准确性与稳定性,视觉定位提供丰富的图像信息,无线蓝牙定位确保覆盖范围与稳定性,二者匹配能修正误差,适应不同环境变化,为路径优化提供精准位置基础,提升机器人导航效率与任务执行成功率。
23、2、本发明通过无线蓝牙和视觉信号结合a*算法进行路径规划,在无线蓝牙与视觉信号互补,精准确定位置来为a*算法提供可靠数据,a*算法借此高效规划路径,以及避开障碍物,确保机器人快速准确到达目标,提高导航效率与任务执行成功率,增强系统稳定性。
24、3、本发明中在机器人运行最优路径时遇新障碍物时,可重新运行a*路径规划算法来能快速适应环境变化,确保机器人及时调整路径,有效避开新障碍,提高移动效率与安全性,同时增强在动态环境中的适应性,保障任务顺利进行,提升运行的可靠性。
技术特征:
1.基于人工智能的自适应室内定位及路径优化方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于人工智能的自适应室内定位及路径优化方法,其特征在于,所述s1中摄像头分为四个,对室内多个方向进行覆盖,且采集频率为每秒30-60帧,通过计算机以室内角落为中心计算出目标物体以及其他障碍物体在图像中的坐标值,所述坐标为直角坐标系。
3.根据权利要求1所述的基于人工智能的自适应室内定位及路径优化方法,其特征在于,所述s2室内蓝牙信标设置为三个记为a、b、c,所述机器人配备蓝牙接收器,可接收来自周围蓝牙信标的信号强度,通过室内角落为中心建立一个室内坐标系,所述三角定位算法包括三边测量法,机器人的位置坐标为(x,y)通过以下方程组求解:
4.根据权利要求1所述的基于人工智能的自适应室内定位及路径优化方法,其特征在于,所述s3中视觉定位数据与无线蓝牙定位的目标位置坐标为相同坐标系,其位置阈值为0.1—0.2米,若超过则不匹配,重新采集数据进行匹配,若其距离偏差在范围内则进行匹配绑定,为目标物体分配一个唯一的标识符,并将视觉定位和无线蓝牙定位的坐标值与该标识符关联起来。
5.根据权利要求1所述的基于人工智能的自适应室内定位及路径优化方法,其特征在于,所述s4中通过无线蓝牙与视觉信号获取信息辅助确认目标位置,通过a*算法计算最优路径,首先创建两个列表:开放列表和关闭列表,且将起点坐标加入开放列表,设置起点的g值为0,再计算起点到目标点的欧几里得距离作为启发函数值h,且其中两个节点为a(x1,y1)和b(x2,y2),路径搜索:通过之间坐标系中以目标位置的上下左右四个方向的相邻坐标节点进行扩展,且相邻节点是障碍物时则跳过,通过回溯,选择达到目标节点路径f最小的节点作为下一个要扩展的节点目标,f为启发函数值d与g值之和。
6.根据权利要求1所述的基于人工智能的自适应室内定位及路径优化方法,其特征在于,所述s5中将最优路径以坐标序列的形式输出,表示机器人依次经过的位置,同时通过摄像头实时监测移动障碍物。
7.根据权利要求1所述的基于人工智能的自适应室内定位及路径优化方法,其特征在于,所述s6中机器人的移动路径有新的障碍物,导致环境发生变化,重新运行a*路径规划算法,更新最优路径。
技术总结
本发明涉及人工智能技术领域,公开了基于人工智能的自适应室内定位及路径优化方法,包括以下步骤:S1:视觉定位数据采集,部署摄像头的位置和角度,以覆盖室内区域,再实时采集室内环境的图像数据,通过视觉人工智能计算并确定目标物体以及其他障碍物体在图像中的位置;S2:无线蓝牙定位数据采集;S3:定位数据融合与评估;S4:目标设置与路径规划;S5:路径执行与监测;S6:动态路径优化。通过视觉人工智能与无线蓝牙定位相结合,来提高定位准确性与稳定性,视觉定位提供丰富的图像信息,无线蓝牙定位确保覆盖范围与稳定性,二者匹配能修正误差,适应不同环境变化,为路径优化提供精准位置基础,提升机器人导航效率与任务执行成功率。
技术研发人员:陶丽,崔媛,宝都吉雅
受保护的技术使用者:鄂尔多斯应用技术学院
技术研发日:
技术公布日:2024/12/12
- 还没有人留言评论。精彩留言会获得点赞!