一种无人机探地雷达水深探测方法、存储介质、设备
本发明涉及水深探测,尤其涉及一种无人机探地雷达水深探测方法、存储介质、设备。
背景技术:
1、随着人口的持续增长和气候变化的加剧,水资源短缺问题日益严峻。水体深度的准确测量在湖泊、河流和水库的水量监控与水资源管理中具有重要作用。准确的水深信息不仅有助于评估水资源的可用性和水质,还可以为洪水预报提供参考。因此,准确的水深测量对于水资源的有效管理与利用尤为重要。
2、当前,卫星遥感、机载激光雷达(lidar)及声纳等都是可用于水深评估的遥感探测方式。但存在的问题是数据处理常常涉及到较为复杂的算法与模型,使得直观的数据解析较为困难。此外,卫星遥感限用于浅水区,在深水区的测量精度会显著降低,且其中的光谱遥感易受水体环境因素的影响;较为典型的是,水体悬浮物、水体浑浊度和光照条件均影响探测和评估的结果,因此只适用于水质清澈的水体,应用场景受到限制。在可通航的河流中,河流水深通常使用载人或无人船上的单波束或多波束声纳进行测量。然而,由于表面杂波和多径效应,声纳系统在测量非常浅的深度(如2m)时存在局限性,特别是对于最常用的频率(小于1mhz)。在浅水区,传统的河流水深测量方法通常使用rtk(real-timekinematic,实时动态差分法)和gnss(global navigation satellite system,全球导航卫星系统)在河流沿线特定位置进行横断面测量。这种方法不仅耗时并需要大量人力,对于大范围的水深测量而言,成本非常高。
技术实现思路
1、本发明的目的在于:为了解决遥感探测的水体应用场景限制、数据处理复杂与解析困难的问题,提出一种无人机探地雷达水深探测方法,包括以下步骤:
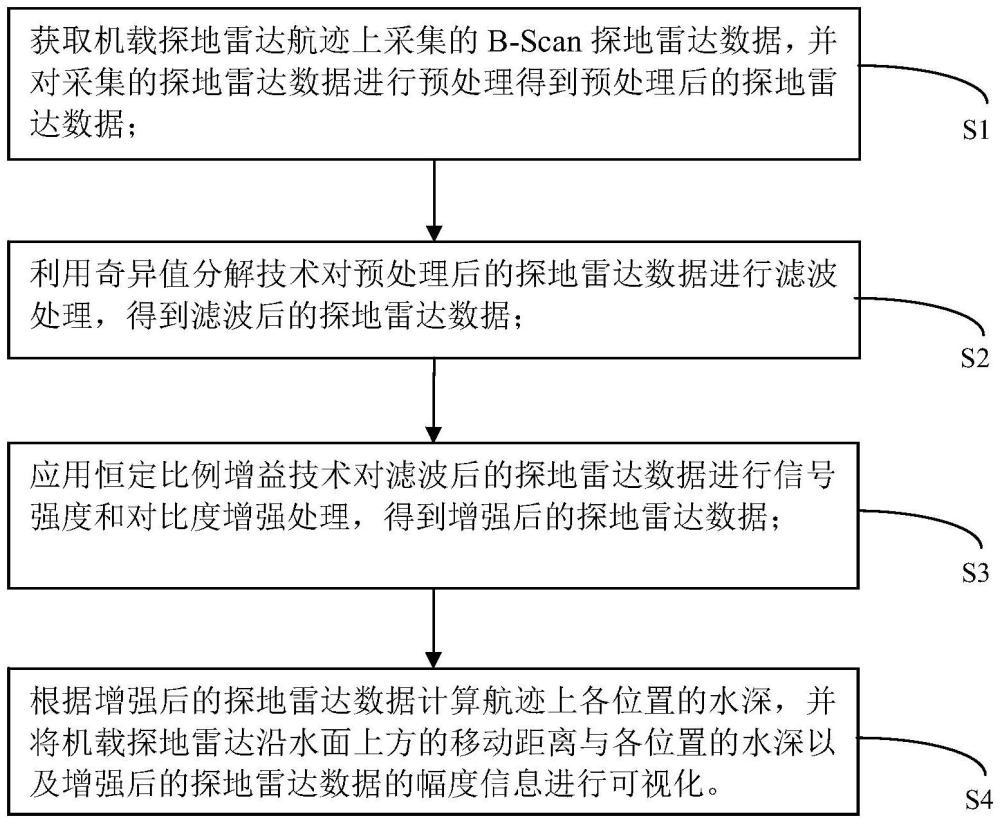
2、s1、获取机载探地雷达航迹上采集的b-scan探地雷达数据,并对采集的探地雷达数据进行预处理得到预处理后的探地雷达数据;
3、s2、利用奇异值分解技术对预处理后的探地雷达数据进行滤波处理,得到滤波后的探地雷达数据;
4、s3、应用恒定比例增益技术对滤波后的探地雷达数据进行信号强度与对比度增强处理,得到增强后的探地雷达数据;
5、s4、根据增强后的探地雷达数据计算航迹上各位置的水深,并将机载探地雷达沿水面上方的移动距离与各位置的水深以及增强后的探地雷达数据的幅度信息进行可视化。
6、进一步地,对采集的探地雷达数据进行预处理包括:零时校正、直达波去除、背景噪声去除、增益补偿;
7、零时校正具体为:
8、对无人机探地雷达在距离水面已知高度处进行数据采集,并提取水面反射子波,通过提取的水面反射子波的时间坐标回推探地雷达发射子波的零时刻位置,并将其标定为探地雷达系统发射信号的起始时刻,对所有探地雷达数据进行时间上的零时归位。
9、进一步地,
10、使用tukey窗函数进行直达波去除,tukey窗函数表示为:
11、
12、其中,w(n)为tukey窗函数的数学表达式,n表示窗函数的长度,r表示决定tukey窗行为的值。
13、进一步地,背景噪声去除具体为:
14、采集的探地雷达数据的每一道a-scan数据减去探地雷达数据的平均值;
15、进一步地,引入增益函数在一定深度区间设置不同的增益系数进行增益补偿,表示为:
16、
17、其中,g(d)表示增益函数,d表示信号的探测范围,d0表示探测范围内信号被放大的初始深度,d1表示最大探测深度,表示d<d0时的增益补偿值,da表示d0≤d≤d1时的增益补偿值,表示d>d1时的增益补偿值,a表示增益系数。
18、进一步地,利用奇异值分解技术对预处理后的探地雷达数据进行滤波处理具体为:
19、将预处理后的探地雷达数据的矩阵通过奇异值分解技术分解为三个矩阵的乘积:b=usvt,其中,b表示预处理后的探地雷达数据的矩阵,u和v分别是m×m阶和n×n阶的正交矩阵,其中u包含左奇异向量,v包含右奇异向量,s为对角矩阵,其中,σ11≥σ22≥...≥σnn≥0,p=min(m,n),将矩阵s中最大的三个对角元素置为零,得到s1,滤波后的探地雷达数据表示为::b1=us1vt,其中,b1表示滤波后的探地雷达数据的矩阵。
20、进一步地,应用恒定比例增益技术对滤波后的探地雷达数据进行信号强度与对比度增强处理,具体为:
21、
22、max=max[abs(d)]
23、其中,d1表示增强后的探地雷达数据,d表示滤波后的探地雷达数据,gain表示增益。
24、进一步地,s4具体为:
25、根据增强后的探地雷达数据中水面反射波的时间与水底反射波的时间计算水深:
26、
27、其中,h表示水深,t0表示探地雷达从发射电磁波到接收到水面反射波的平均时间,t表示探地雷达从发射电磁波到接收到水底反射波的时间,v表示电磁波在水中的传播速度;
28、将机载探地雷达沿水面上方移动的飞行距离作为x轴,将水面到水底的深度信息作为y轴建立坐标系,并将增强后的探地雷达数据的幅度信息绘制在坐标系中。
29、本发明还提出一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现上述的无人机探地雷达水深探测方法。
30、本发明还提出一种电子设备,包括处理器和存储器,所述处理器与所述存储器相互连接,其中,所述存储器用于存储计算机程序,所述计算机程序包括计算机可读指令,所述处理器被配置用于调用所述计算机可读指令,执行上述的无人机探地雷达水深探测方法。
31、本发明提供的技术方案带来的有益效果是:
32、本发明提出利用无人机搭载探地雷达系统,利用奇异值分解技术对数据进行滤波处理,降低噪声,提高信号的信噪比,显著提高数据的解析能力,应用恒定比例增益技术来增强数据的信号强度和对比度,通过调整使数据更易于解释和分析,增强视觉展示的效果。结合定位技术和数据处理算法,实现快速、高效的水深评估。本发明的方法不仅大大简化操作,降低成本,还能在复杂和危险水域环境中灵活作业,极大提高作业的安全性和灵活性。所提方法不仅适用于常规水域,还可用于紧急情况下的快速洪水评估,具有广泛的应用前景。
技术特征:
1.一种无人机探地雷达水深探测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种无人机探地雷达水深探测方法,其特征在于,对采集的探地雷达数据进行预处理包括:零时校正、直达波去除、背景噪声去除、增益补偿;
3.根据权利要求2所述的一种无人机探地雷达水深探测方法,其特征在于,
4.根据权利要求2所述的一种无人机探地雷达水深探测方法,其特征在于,背景噪声去除具体为:
5.根据权利要求2所述的一种无人机探地雷达水深探测方法,其特征在于,引入增益函数在一定深度区间设置不同的增益系数进行增益补偿,表示为:
6.根据权利要求1所述的一种无人机探地雷达水深探测方法,其特征在于,利用奇异值分解技术对预处理后的探地雷达数据进行滤波处理具体为:
7.根据权利要求1所述的一种无人机探地雷达水深探测方法,其特征在于,应用恒定比例增益技术对滤波后的探地雷达数据进行信号强度与对比度增强处理,具体为:
8.根据权利要求1所述的一种无人机探地雷达水深探测方法,其特征在于,s4具体为:
9.一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现如权利要求1-8任一项所述的方法。
10.一种电子设备,其特征在于,包括处理器和存储器,所述处理器与所述存储器相互连接,其中,所述存储器用于存储计算机程序,所述计算机程序包括计算机可读指令,所述处理器被配置用于调用所述计算机可读指令,执行如权利要求1-8任一项所述的方法。
技术总结
本发明公开一种无人机探地雷达水深探测方法、存储介质、设备,涉及水深探测技术领域,方法包括:获取机载探地雷达航迹上采集的B‑Scan探地雷达数据,并进行预处理;利用奇异值分解技术对预处理后的探地雷达数据进行滤波处理,得到滤波后的探地雷达数据;应用恒定比例增益技术对滤波后的探地雷达数据进行信号强度和对比度增强处理,得到增强后的探地雷达数据;根据增强后的探地雷达数据计算航迹上各位置的水深,并将机载探地雷达沿水面上方的移动距离与各位置的水深以及增强后的探地雷达数据的幅度信息进行可视化。本发明的方法不仅大大简化操作,降低成本,还能在复杂和危险水域环境中灵活作业,极大提高作业的安全性和灵活性。
技术研发人员:周峰,王莹,胡祥云,张路,陈奕飞
受保护的技术使用者:中国地质大学(武汉)
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!