一种无人机作业航线规划方法、装置和无人机与流程
本申请涉及农业领域,更为具体地,涉及一种无人机作业航线规划方法、装置和无人机。
背景技术:
1、在农业生产活动中,农业无人机的出现,极大的提高了效率,且农业无人机作业速度快,移动较为灵活、作业较为安全、不受地形环境因素影响,因此,作为农业航空的重要标志之一的农业无人机航空喷施方式得到迅速的应用和发展。
2、目前常规的农业无人机作业过程中,规划的农业无人机作业的航线,适用于方形地块或多边形地块,例如,需要在多边形的每个顶点打点以获取每个顶点的坐标位置,进而标记出整个地块。但针对方形地块或多边形地块规划的农业无人机作业航线,应用于圆形地块时,使得农业无人机换行次数增多,且每次换行农业无人机需要加速、减速、掉头,影响农业无人机作业效率。鉴于此,如何规划一种具有较高作业效率的无人机作业航线的方法,是一项亟待解决的技术问题。
技术实现思路
1、本申请提供一种无人机作业航线规划方法、装置和无人机,具有较高的作业效率。
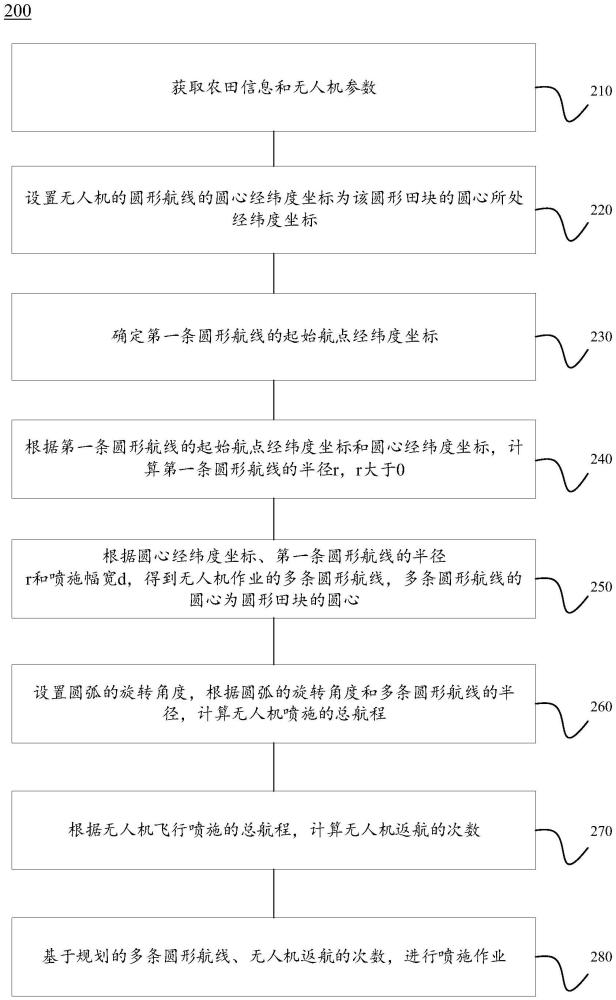
2、第一方面,提供了一种无人机作业航线规划方法,包括:获取农田信息和无人机参数,该农田信息包括圆形田块的圆心所处的经纬度坐标和该圆形田块的直径r,该无人机参数包括无人机飞行高度h、无人机最大载荷量zm、喷施作业时的飞行速度vp、喷施流量lp和喷施幅宽d,其中,r,h、zm、vp、lp和d大于0;设置该无人机的圆形航线的圆心经纬度坐标为该圆形田块的圆心所处的经纬度坐标;确定第一条圆形航线的起始航点经纬度坐标;根据该第一条圆形航线的起始航点经纬度坐标和该圆心经纬度坐标,计算该第一条圆形航线的半径r;根据该圆心经纬度坐标、该第一条圆形航线的半径r和该喷施幅宽d,得到所述无人机作业的多条圆形航线,该多条圆形航线的圆心为该圆形田块的圆心;设置圆弧的旋转角度,根据该圆弧的旋转角度和该多条圆形航线的半径,计算该无人机喷施的总航程;根据该无人机飞行喷施的总航程,计算该无人机返航的次数;基于该规划的多个圆形航线、该无人机返航的次数,进行喷施作业。
3、通过本申请实施例的技术方案,将圆形农田规划为多个同心圆的圆形航线,使得无人机在基于规划的多个圆形航线进行喷施作业时,在确定了圆形航线的圆心、半径以及喷施幅宽的情况下,便能够规划出一组圆形航线,避免了大量打点带来的工作量大的问题。同时,无人机在绕着圆形航线进行喷施作业时,避免了因反复换行时无人机需要反复加速、减速和掉头,而导致的无人机电量消耗增加以及作业时间增长的问题,从而提高了作业效率。
4、结合第一方面,在第一方面的某些实现方式中,根据该圆形田块的直径r和喷施幅宽d以及喷施作业的全覆盖性,计算圆形航线的总条数。
5、结合第一方面,在第一方面的某些实现方式中,该第一条圆形航线为该多条圆形航线中半径最小的圆形航线;或者,该第一条圆形航线为该多条圆形航线中半径最大的圆形航线。
6、结合第一方面,在第一方面的某些实现方式中,当第一条圆形航线为该多条圆形航线中半径最小的圆形航线时,设置该第一条圆形航线的半径为:r,第二条圆形航线的半径为:r+d,第三条圆形航线的半径为:r+2d;设置第四条圆形航线的半径至第n条圆形航线的半径为:r+(n-1)d,n=4,5,…,r/2d,其中r小于r。
7、结合第一方面,在第一方面的某些实现方式中,当该第一条圆形航线为该多条圆形航线中半径最大的圆形航线时,设置所述第一条圆形航线的半径为:r,第二条圆形航线的半径为:r-d,第三条圆形航线的半径为:r-2d;设置第四条圆形航线的半径至第n条圆形航线的半径为:r-(n-1)d,n=4,5,…,r/2d,其中,r小于或者等于r。
8、结合第一方面,在第一方面的某些实现方式中,该圆弧的旋转角度的范围为[-360°,360°];当该圆弧的旋转角度的范围为[0°,360°]时,该无人机顺时针飞行;当该圆弧的旋转角度的范围为[-360°,0°]时,该无人机逆时针飞行。
9、结合第一方面,在第一方面的某些实现方式中,该无人机喷施的总航程dm为:dm=2π(r+r+d+r+2d+...+r+(n-1)d)=2π(nr+n(n-1)d/2),其中,n=r/2d;该无人机的最大载荷量zm下的喷施航程qm=vp×zm/lp。
10、结合第一方面,在第一方面的某些实现方式中,该无人机喷施的总航程dm为:dm=2π(r+r-d+r-2d+...+r-(n-1)d)=2π(nr-n(n-1)d/2),其中,n=r/2d;该无人机的最大载荷量zm下的喷施航程qm=vp×zm/lp。
11、结合第一方面,在第一方面的某些实现方式中,根据该无人机喷施的总航程dm,计算该无人机返航的次数,包括:
12、
13、其中,i为返航次数且i为大于0的整数。
14、结合第一方面,在第一方面的某些实现方式中,该方法还包括:根据该无人机起飞时的电量和该无人机喷施的总航程,确定返航的次数j,该无人机返航的次数为i+j,j≥1且为正整数。
15、结合第一方面,在第一方面的某些实现方式中,根据该无人机起飞时的电量和该无人机喷施的总航程,确定返航的次数j,包括:根据该无人机起飞时的电量,确定无人机满电时飞行的航程;根据该无人机满电时飞行的航程以及该无人机的喷施总航程,确定该返航的次数j。
16、结合第一方面,在第一方面的某些实现方式中,该方法还包括:设置该无人机的起飞航点的经纬度坐标,该无人机的起飞航点的经纬度坐标与该第一条圆形航线的起始航点的经纬度坐标在一条直线上。
17、结合第一方面,在第一方面的某些实现方式中,该无人机从所述无人机的起飞航点飞行至该第一条圆形航线的起始航点;该无人机绕着该第一条圆形航线进行喷施作业;在该第一条圆形航线的起始航点处,该无人机平移至第二条圆形航线,该无人机绕着该第二条圆形航线进行喷施作业。
18、第二方面,提供了一种无人机作业航线规划装置,包括:处理器和存储器,该存储器用于存储计算机程序,该处理器用于调用并运行该存储器中存储的计算机程序以执行:如第一方面提供的无人机作业航线规划方法。
19、第三方面,提供了一种无人机,包括:动力装置,以及如第二方面提供的无人机作业航线规划装置,该无人机作业航线规划装置用于控制该动力装置以控制该无人机飞行。
技术特征:
1.一种无人机作业航线规划方法,其特征在于,包括:
2.根据权利要求1所述的无人机作业航线规划方法,其特征在于,根据所述圆形田块的直径r和喷施幅宽d以及喷施作业的全覆盖性,计算圆形航线的总条数。
3.根据权利要求1所述的无人机作业航线规划方法,其特征在于,所述第一条圆形航线为所述多条圆形航线中半径最小的圆形航线;或者,所述第一条圆形航线为所述多条圆形航线中半径最大的圆形航线。
4.根据权利要求3所述的无人机作业航线规划方法,其特征在于,当所述第一条圆形航线为所述多条圆形航线中半径最小的圆形航线时,设置所述第一条圆形航线的半径为:r,第二条圆形航线的半径为:r+d,第三条圆形航线的半径为:r+2d;
5.根据权利要求3所述的无人机作业航线规划方法,其特征在于,当所述第一条圆形航线为所述多条圆形航线中半径最大的圆形航线时,设置所述第一条圆形航线的半径为:r,第二条圆形航线的半径为:r-d,第三条圆形航线的半径为:r-2d;
6.根据权利要求1所述的无人机作业航线规划方法,其特征在于,所述圆弧的旋转角度的范围为[-360°,360°];
7.根据权利要求4所述的无人机作业航线规划方法,其特征在于,所述无人机喷施的总航程dm为:dm=2π(r+r+d+r+2d+...+r+(n-1)d)=2π(nr+n(n-1)d/2),其中,n=r/2d;
8.根据权利要求5所述的无人机作业航线规划方法,其特征在于,所述无人机喷施的总航程dm为:dm=2π(r+r-d+r-2d+...+r-(n-1)d)=2π(nr-n(n-1)d/2),其中,n=r/2d;
9.根据权利要求7或8所述的无人机作业航线规划方法,其特征在于,根据所述无人机喷施的总航程dm,计算所述无人机返航的次数,包括:
10.根据权利要求9所述的无人机作业航线规划方法,其特征在于,所述方法还包括:
11.根据权利要求10所述的无人机作业航线规划方法,其特征在于,根据所述无人机起飞时的电量和所述无人机喷施的总航程,确定返航的次数j,包括:
12.根据权利要求1-8中任一项所述的无人机作业航线规划方法,其特征在于,所述方法还包括:
13.根据权利要求12所述的无人机作业航线规划方法,其特征在于,所述无人机从所述无人机的起飞航点飞行至所述第一条圆形航线的起始航点;
14.一种无人机作业航线规划装置,其特征在于,包括:处理器和存储器,所述存储器用于存储计算机程序,所述处理器用于调用并运行所述存储器中存储的计算机程序以执行:如权利要求1至13中任一项所述的无人机作业航线规划方法。
15.一种无人机,其特征在于,包括:动力装置,以及如权利要求14所述的无人机作业航线规划装置,所述无人机作业航线规划装置用于控制所述动力装置以控制所述无人机飞行。
技术总结
本申请提供一种无人机作业航线规划方法、装置和无人机,涉及农业领域。该方法、装置和无人机旨在解决无人机在作业中因反复换行而导致的作业时间增长的问题,通过圆形田块的圆心所处的经纬度坐标、第一条圆形航线的半径和无人机喷施幅宽,得到无人机作业的多条圆形航线以及根据规划的多条圆形航线进行喷施作业。本申请通过在确定了圆形航线的圆心、半径以及喷施幅宽的情况下,便能够规划出一组圆形航线,以及无人机在绕着圆形航线进行喷施作业时,减少了作业时间,从而提高了作业效率。
技术研发人员:王国胜
受保护的技术使用者:黑龙江惠达科技股份有限公司
技术研发日:
技术公布日:2024/11/7
- 还没有人留言评论。精彩留言会获得点赞!