一种基于地形的拖曳式浅剖定位数据改正方法与流程
本发明涉及数据检测,具体涉及一种基于地形的拖曳式浅剖定位数据改正方法。
背景技术:
1、浅地层剖面仪的挂载方式有舷挂式和拖曳式两种,拖曳式安装因能灵活调整吃水深度、作业时受船舶姿态影响较小等优点得到了广泛的应用。
2、当前拖曳式浅地层剖面仪的位置改正方法主要有两种:基于水下声学定位方法和基于layback算法。其中:水下声学定位方法一般采用超短基线定位系统进行,虽然能比较准确的拖曳体进行定位,但需要增加额外的硬件设备,同时对工作水深有一定的要求,存在一定的使用门槛;layback算法如图1所示,其假设拖鱼在船舶后方(即两者的航迹线一致),通过拖缆长度和百分比估算拖鱼位置。由于船舶与拖鱼在水体中经受的风浪、水流条件存在较大的差异,两者运动轨迹存在一定差异,一般超过米级,导致浅地层剖面成果定位数据误差较大,与实际情况存在一定的偏差,难以满足实际生产工作的需要。
技术实现思路
1、本发明的目的是提供一种基于地形的拖曳式浅剖定位数据改正方法,用于解决因为受风浪和水流条件影响,造成的浅地层剖面成果定位数据误差较大的问题。
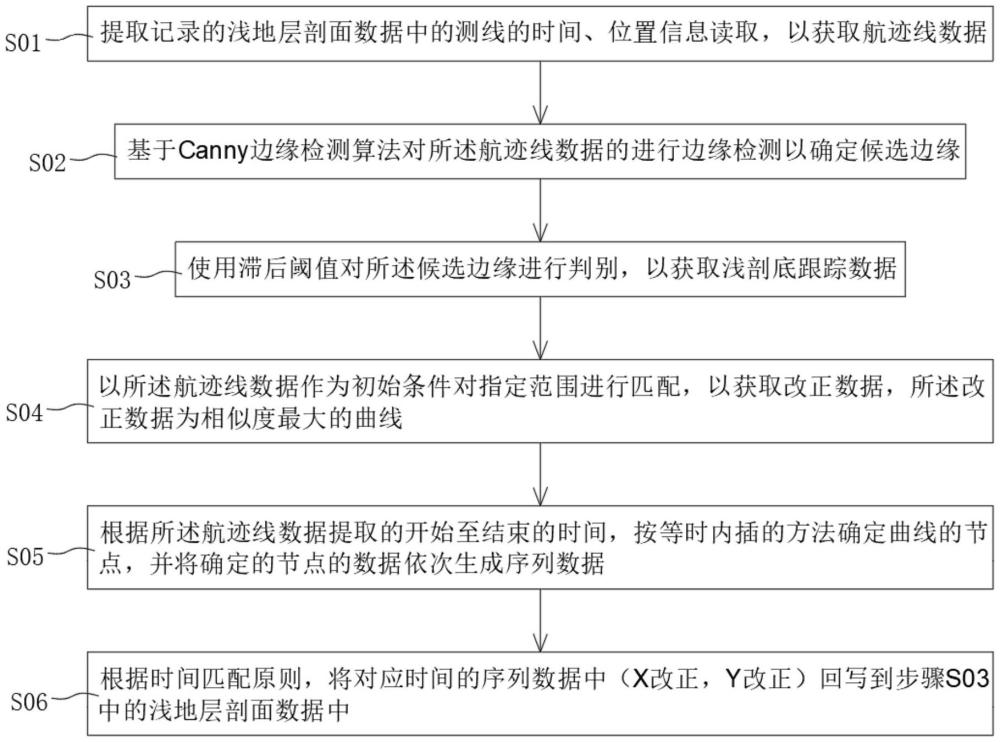
2、为了实现上述目的,本发明提供如下技术方案:一种基于地形的拖曳式浅剖定位数据改正方法,包括以下步骤:
3、s01、提取记录的浅地层剖面数据中的测线的时间、位置信息读取,以获取航迹线数据(index,datetime,x,y),其中:index为时间,datetime为时间,x,y为二维位置;
4、s02、基于canny边缘检测算法对所述航迹线数据进行边缘检测以确定候选边缘;
5、s03、使用滞后阈值对所述候选边缘进行判别,以获取浅剖底跟踪数据(index,datetime,x,y,z),其中:index为时间,datetime为时间,x,y,z为三维位置;
6、s04、以所述航迹线数据作为初始条件对指定范围进行匹配,以获取改正数据,所述改正数据为相似度最大的曲线;
7、s05、根据所述航迹线数据提取的开始至结束的时间,按等时内插的方法确定曲线的节点,并将确定的节点的数据依次生成序列数据(index,datetime,x改正,y改正,z);
8、s06、根据时间匹配原则,将对应时间的序列数据中(x改正,y改正)回写到步骤s03中的浅地层剖面数据中。
9、作为优选的,所述步骤02中canny边缘检测算法对所述航迹线数据处理的步骤包括:
10、s21、使用高斯平滑滤波器卷积降噪,高斯内核为n*n,则:
11、
12、s22、运用一对卷积分别计算x和y方向,
13、
14、s23、计算梯度幅值和方向:
15、
16、作为优选的,所述s03中滞后阈值包括高阈值和低阈值,并基于高阈值和低阈值对候选边缘进行识别:
17、某一像素位置的幅值超过了高阈值,则像素被保留为边缘像素;
18、某一像素位置的幅值小于低阈值,则像素被排除;
19、某一像素位置的幅值在两个阈值之间,则像素仅仅在连接到一个高于高阈值的像素时被保留。
20、作为优选的,所述浅剖底跟踪数据的获取包括:
21、s31、获取步骤s01航迹线数据中的datetime形成时间节点;
22、s32、按等时间插值的方法将识别的所述候选边缘对应时间节点的断面赋予地理信息坐标。
23、作为优选的,所述步骤s04中以所述航迹线数据作为初始条件对指定范围进行匹配包括:
24、s41、提取所述步骤s01中航迹线数据的第一点(x1,y1)和最后一点的位置(x2,y2),已知的拖缆长度为l,按照拖缆长度的50%确定航迹线附近水下地形数据,拟提取区域数据;
25、s42、基于获取的区域数据,计算各个角点:
26、
27、α=arctan(k);
28、
29、则四个定点坐标分别为:
30、(xa,ya)=(x2+δx-δy,y2+δy+δx);
31、(xb,yb)=(x2+δx+δy,y2+δy-δx);
32、(xc,yc)=(x1-δx+δy,y1-δy-δx);
33、(xd,yd)=(x1-δx-δy,y1-δy+δx);
34、以上述四个定点确定范围内水深数据作为与断面进行匹配的数据源。
35、作为优选的,所述步骤s04获取所述获取改正数据包括:
36、s43、在四个定点确定范围内以所述航迹线数据的第一个位置划分为等规的区域a、b并随机抽取n个点作为起点;
37、s44、设某点的坐标为高程为然后以α和α与-0.1~0.1的随机数之和为方向,按照浅剖测线长度的作为步进;
38、s45、则下一个点坐标为高程为重复步骤s43至步骤s45直到触碰边界,取得对应的点集合,对应的值就可以形成一根航迹线数据;
39、s46、将生成的n个所述步骤s43中形成的一个搜索航迹线数据与浅剖底跟踪数据采用余弦相似度算法进行匹配比对,计算相似度,相似度的取值范围在(0,1),则:
40、
41、其中,a代表搜索航迹线数据,b代表浅剖底跟踪数据;
42、s47、对于计算得到的n个相似度,从大到小排序,取最大的个,作为候选测线;
43、s48、平行每根候选测线,按照浅剖测线长度的宽度,在两侧复制候选测线,形成个候选区域;
44、s49、重复执行步骤s46-步骤s47,将相似度最大的曲线作为改正数据。
45、作为优选的,所述步骤s41中n个点中的n取数不小于20。
46、作为优选的,所述步骤s01中的浅地层剖面数据以seg-y格式存在。
47、在上述技术方案中,本发明提供的一种基于地形的拖曳式浅剖定位数据改正方法,具备以下有益效果:
48、1、在进行浅地层剖面探测时一般采集了水下地形数据,采用该算法进行改正时无需增加额外成本。
49、2、底跟踪是浅剖数据处理与分析的必要工作,作为改正算法的输入不会额外增加工作量;匹配工作可由算法自动进行。
50、3、本算法多个步骤可并行执行,计算效率高,因此本改正算法无需增加额外费用和人力物力,且无需使用其他硬件设备,在大幅提高定位精度的基础上可以高效率自动化完成。
技术特征:
1.一种基于地形的拖曳式浅剖定位数据改正方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种基于地形的拖曳式浅剖定位数据改正方法,其特征在于,所述步骤02中canny边缘检测算法对所述航迹线数据处理的步骤包括:
3.根据权利要求1所述的一种基于地形的拖曳式浅剖定位数据改正方法,其特征在于,所述s03中滞后阈值包括高阈值和低阈值,并基于高阈值和低阈值对候选边缘进行识别:
4.根据权利要求1所述的一种基于地形的拖曳式浅剖定位数据改正方法,其特征在于,所述浅剖底跟踪数据的获取包括:
5.根据权利要求1所述的一种基于地形的拖曳式浅剖定位数据改正方法,其特征在于,所述步骤s04中以所述航迹线数据作为初始条件对指定范围进行匹配包括:
6.根据权利要求5所述的一种基于地形的拖曳式浅剖定位数据改正方法,其特征在于,所述步骤s04获取所述获取改正数据包括:
7.根据权利要求6所述的一种基于地形的拖曳式浅剖定位数据改正方法,其特征在于,所述步骤s41中n个点中的n取数不小于20。
8.根据权利要求1所述的一种基于地形的拖曳式浅剖定位数据改正方法,其特征在于,所述步骤s01中的浅地层剖面数据以seg-y格式存在。
9.一种电子设备,包括存储器、处理器及存储在存储器上并可在处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现权利要求1至8任一项所述基于局部方差和后验概率分类器的视觉定位方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,该计算机程序被处理器执行时实现权利要求1至8任一项所述基于局部方差和后验概率分类器的视觉定位方法的步骤。
技术总结
本发明具体设计涉及数据检测技术领域,公开了一种基于地形的拖曳式浅剖定位数据改正方法,包括以下步骤:S01、提取记录的浅地层剖面数据中的测线的时间、位置信息读取,以获取航迹线数据(index,datetime,X,Y),其中:index为时间,datetime为时间,X,Y为二维位置;S02、基于Canny边缘检测算法对所述航迹线数据进行边缘检测以确定候选边缘;S03、使用滞后阈值对所述候选边缘进行判别,以获取浅剖底跟踪数据(index,datetime,X,Y,Z)。该发明将浅剖定位数据作为初始值,通过底跟踪技术获取浅地层剖面数据的海/河床地形数据,并与已知的地形数据成果进行匹配,寻找浅剖数据的实际位置并进行改正。
技术研发人员:魏荣灏,徐达,黄叶华,陈佳兵,曾剑,李最森,朱彬峰,叶文振,龚令平,张炳蔚
受保护的技术使用者:浙江省水利河口研究院(浙江省海洋规划设计研究院)
技术研发日:
技术公布日:2025/1/2
- 还没有人留言评论。精彩留言会获得点赞!