一种大负载机器人传动刚度标定装置及方法与流程
本发明属于工业机器人本体刚度测试,特别涉及一种大负载机器人传动刚度标定装置及方法。
背景技术:
1、工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能,工业机器人被广泛应用于电子、物流、化工等各个工业领域之中。随着机器人技术不断发展以及智能制造不断普及,传统大负载工业机器人成为了制造业行业的焦点。其中大负载工业机器人凭借着安全、易用、灵活、低投入、快速生产的特点,被越来越多的制造商引入到了生产制造中。
2、机器人传动刚度是指其机器人在加速转矩作用下结构传动链抵抗变形的能力,是工业机器人的一项重要性能指标,它不但决定了工业机器人在负载下的定位精度,而且影响机器人本体结构的动态特性,机器人的振动抑制策略、机器人节拍能力优化的基础数据。关节是协作机器人的重要组成部分,关节的刚度指标也很大程度的影响大负载机器人的整机的动静态性能。因此,对协作机器人关节刚度指标的评估显的尤为重要。目前,对关节刚度测试时,通常需要搭建比较精密的工装,在关节组成完毕后,单独进行测量,此种方法操作比较复杂,且测试成本较高。
技术实现思路
1、针对上述问题,本发明的目的在于提供一种大负载机器人传动刚度标定装置及方法,以解决现有关节刚度测试需要搭建比较精密的工装,在关节组成完毕后,单独进行测量,操作比较复杂,且测试成本较高的问题。
2、为了实现上述目的,本发明采用以下技术方案:
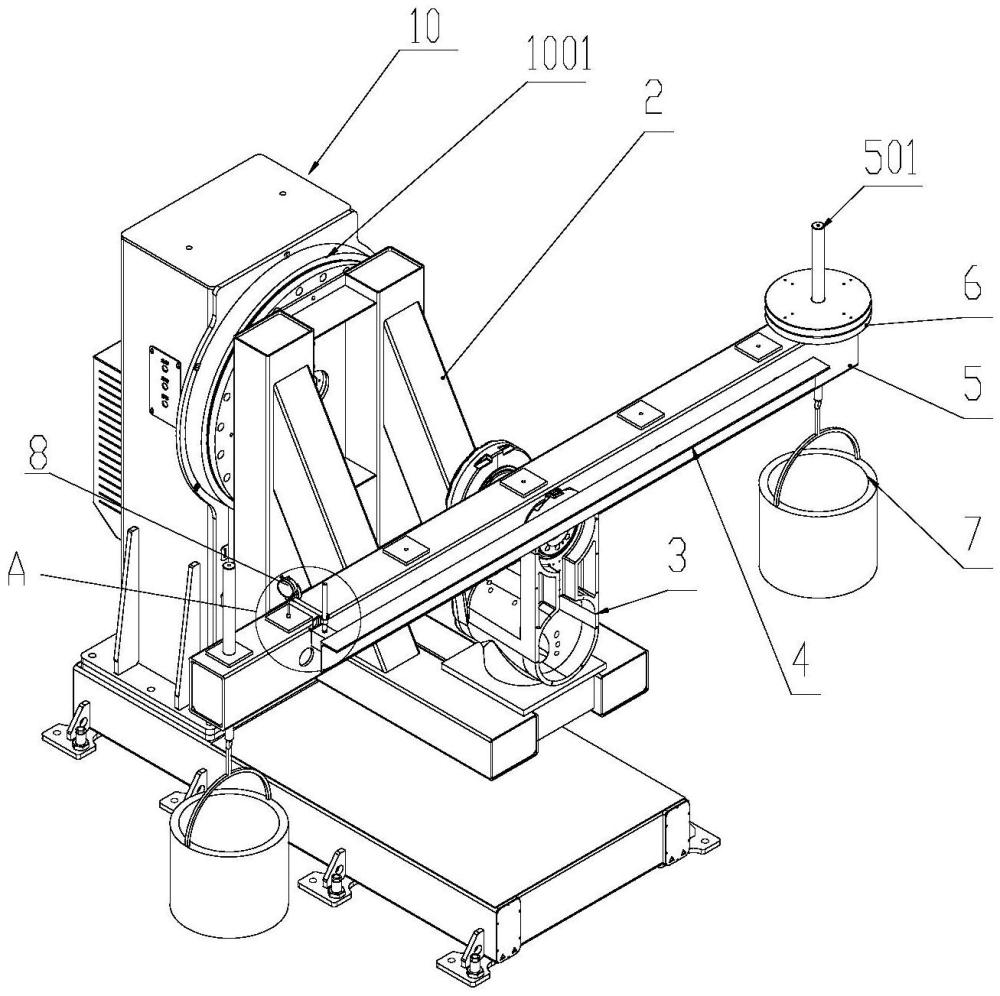
3、本发明一方面提供一种大负载机器人传动刚度标定装置,包括转接框架、固定横梁、测试转矩横梁、配重机构、测量仪器、锁定机构及变位机,其中转接框架与变位机的变位旋转盘连接,待标定机器人关节安装在转接框架上,且待标定机器人关节的输出轴与变位旋转盘同轴线,待标定机器人关节的输入轴通过锁定机构锁定;测试转矩横梁的中部与待标定机器人关节的输出轴连接,测试转矩横梁的两端分别与两组配重机构连接;固定横梁连接在待标定机器人关节的输出端外壳上,测量仪器设置于固定横梁的一端,在测试转矩横梁远离测量仪器的一端进行加载,通过测量仪器测量测试转矩横梁的扭转角,从而实现机器人关节的刚度标定。
4、所述配重机构包括配置筒,配重筒悬吊于所述测试转矩横梁的端部,配重筒内添加定质量配重介质。
5、所述测试转矩横梁的两端上部均设有测试杆,测试杆用于套装定质量的负载盘,通过不同数量的负载盘实现不同质量的加载。
6、所述测量仪器包括磁性底座、千分表支架及千分表,其中千分表支架的一端与磁性底座固定连接,另一端安装千分表;磁性底座磁吸在所述固定横梁上,千分表位于所述测试转矩横梁的上方,且千分表的表针与所述测试转矩横梁接触。
7、所述锁定机构包括锁定盘和锁定轴,其中锁定盘上对称设有两个弧型腰孔,锁定轴固定在锁定盘的中心,锁定轴通过键与所述待标定机器人关节的输入轴连接,锁定盘通过分别容置于两个弧型腰孔内的两个手动拨动螺钉与所述待标定机器人关节的输入端外壳连接。
8、所述待标定机器人关节为六自由度垂直多关节型工业机器人的小臂。
9、本发明另一方面提供一种利用如上所述的大负载机器人传动刚度标定装置的标定方法,所述标定方法包括以下步骤:
10、步骤s1:将待标定机器人关节安装在变位机上;
11、首先将转接框架安装在变位机的变位旋转盘上,再将待标定机器人关节的输入端外壳与转接框架连接,且使待标定机器人关节的输出轴的轴线与变位旋转盘的轴线共线;
12、步骤s2:变位机调节变位旋转盘的角度,使转接框架摆正,且通过水平尺校平;
13、步骤s3:测试转矩横梁的中部与待标定机器人关节的输出轴连接,在测试转矩横梁的两端连接配重机构,且利用水平尺校平测试转矩横梁,再通过锁定机构锁定待标定机器人关节的输入轴;
14、步骤s4:将固定横梁连接在待标定机器人关节的输出端外壳上,将测量仪器安装在固定横梁上;
15、步骤s5:在测试转矩横梁的一端逐级加载载荷,在测试转矩横梁的另一端通过测量仪器逐级测量扭转角;然后逐级撤载荷,且逐级测量扭转角变化;
16、在测试转矩横梁的另一端逐级加载载荷,通过测量仪器逐级测量反向扭转角;然后逐级撤载荷,且逐级测量反向扭转角变化,从而获得待标定机器人关节的传动齿轮啮合第一相位的第一条刚度滞回闭环曲线;
17、步骤s6:变位机调节变位旋转盘步进预设角度,解锁锁定机构,旋转待标定机器人关节的输入轴,使测试转矩横梁保持水平状态,且通过水平尺校平;
18、步骤s7:执行步骤s5,获得待标定机器人关节的传动齿轮啮合第二相位的第二条刚度滞回曲线;
19、步骤s8:重复步骤s6和步骤s7,获得多条传动刚度滞回曲线,并进行数据处理分析。
20、本发明的优点及有益效果是:本发明提供的一种大负载机器人传动刚度标定装置,结构简单,可以利用现有机器人关节及关节臂,对关节刚度进行测试,不需要额外增加工装,一方面能够有效的控制误差,使测试结果比较准确;另一方面,借用现有变位机,投资少,更加节约成本。
21、本发明的方法,操作简单,能够有效快速的测试机器人关节的刚度,测试精度高。
技术特征:
1.一种大负载机器人传动刚度标定装置,其特征在于,包括转接框架(2)、固定横梁(4)、测试转矩横梁(5)、配重机构、测量仪器(8)、锁定机构(9)及变位机(10),其中转接框架(2)与变位机(10)的变位旋转盘(1001)连接,待标定机器人关节安装在转接框架(2)上,且待标定机器人关节的输出轴与变位旋转盘(1001)同轴线,待标定机器人关节的输入轴通过锁定机构(9)锁定;测试转矩横梁(5)的中部与待标定机器人关节的输出轴连接,测试转矩横梁(5)的两端分别与两组配重机构连接;固定横梁(4)连接在待标定机器人关节的输出端外壳上,测量仪器(8)设置于固定横梁(4)的一端,在测试转矩横梁(5)远离测量仪器(8)的一端进行加载,通过测量仪器(8)测量测试转矩横梁(5)的扭转角,从而实现机器人关节的刚度标定。
2.根据权利要求1所述的大负载机器人传动刚度标定装置,其特征在于,所述配重机构包括配置筒(7),配重筒(7)悬吊于所述测试转矩横梁(5)的端部,配重筒(7)内添加定质量配重介质。
3.根据权利要求1所述的大负载机器人传动刚度标定装置,其特征在于,所述测试转矩横梁(5)的两端上部均设有测试杆(501),测试杆(501)用于套装定质量的负载盘(6),通过不同数量的负载盘(6)实现不同质量的加载。
4.根据权利要求1所述的大负载机器人传动刚度标定装置,其特征在于,所述测量仪器(8)包括磁性底座(801)、千分表支架(802)及千分表(803),其中千分表支架(802)的一端与磁性底座(801)固定连接,另一端安装千分表(803);磁性底座(801)磁吸在所述固定横梁(4)上,千分表(803)位于所述测试转矩横梁(5)的上方,且千分表(803)的表针(804)与所述测试转矩横梁(5)接触。
5.根据权利要求1所述的大负载机器人传动刚度标定装置,其特征在于,所述锁定机构(9)包括锁定盘(901)和锁定轴(902),其中锁定盘(901)上对称设有两个弧型腰孔(907),锁定轴(902)固定在锁定盘(901)的中心,锁定轴(902)通过键(903)与所述待标定机器人关节的输入轴连接,锁定盘(901)通过分别容置于两个弧型腰孔(907)内的两个手动拨动螺钉(904)与所述待标定机器人关节的输入端外壳连接。
6.根据权利要求1所述的大负载机器人传动刚度标定装置,其特征在于,所述待标定机器人关节为六自由度垂直多关节型工业机器人(1)的小臂(3)。
7.一种利用权利要求1-6任一项所述的大负载机器人传动刚度标定装置的标定方法,其特征在于,所述标定方法包括以下步骤:
技术总结
本发明属于工业机器人本体刚度测试技术领域,特别涉及一种大负载机器人传动刚度标定装置及方法。该装置包括转接框架、固定横梁、测试转矩横梁、配重机构、测量仪器、锁定机构及变位机,转接框架与变位机的变位旋转盘连接,待标定机器人关节安装在转接框架上且的输出轴与变位旋转盘同轴线,待标定机器人关节的输入轴通过锁定机构锁定;测试转矩横梁与待标定机器人关节的输出轴连接,且两端设置配重机构;固定横梁连接在待标定机器人关节的输出端外壳上,测量仪器设置于固定横梁的一端,测试转矩横梁的一端加载,另一端通过测量仪器测量扭转角,从而实现机器人关节的刚度标定。本发明结构简单,能有效控制刚度测试误差,测试结果精准,成本低。
技术研发人员:罗和平,李佳诺,刘会,朱维金,朱文璐,蒋冉,赵洪峰,王鹏宇
受保护的技术使用者:沈阳新松机器人自动化股份有限公司
技术研发日:
技术公布日:2025/1/14
- 还没有人留言评论。精彩留言会获得点赞!