一种基于多模态路网数据的车辆导航分析方法及系统与流程
本发明属于路网数据处理及车辆导航,更具体地,涉及一种基于多模态路网数据的车辆导航分析方法及系统。
背景技术:
1、车辆导航技术已经高度成熟,并且在日常生活和工业应用中得到了广泛应用。以下是车辆导航的现状及其主要特点:
2、1.全球导航卫星系统(gnss)普及
3、gps、北斗是主要的全球导航卫星系统,提供全球范围内的定位和导航服务。
4、大多数导航设备和智能手机都支持多个gnss系统,以提高定位精度和可靠性。
5、2.高精度地图
6、高清地图(hd maps):特别是在自动驾驶领域,高清地图精度达到了厘米级,提供了道路的详细三维信息,如车道线、交通标志、信号灯位置等。
7、动态地图更新:现代导航系统能够实时更新道路信息,如交通堵塞、事故、道路施工等,以提供最佳路线。
8、3.实时交通信息
9、导航系统通过集成实时交通数据,能够计算出当前情况下的最优行驶路线。这些数据通常来自于交通传感器、车载系统、移动设备的数据采集、以及社交媒体上的实时信息。
10、但是现有导航软件由于数据更新不及时,或者数据来源单一,容易导致导航出错的问题。
技术实现思路
1、为解决以上技术问题,本发明提出一种基于多模态路网数据的车辆导航分析方法,包括:
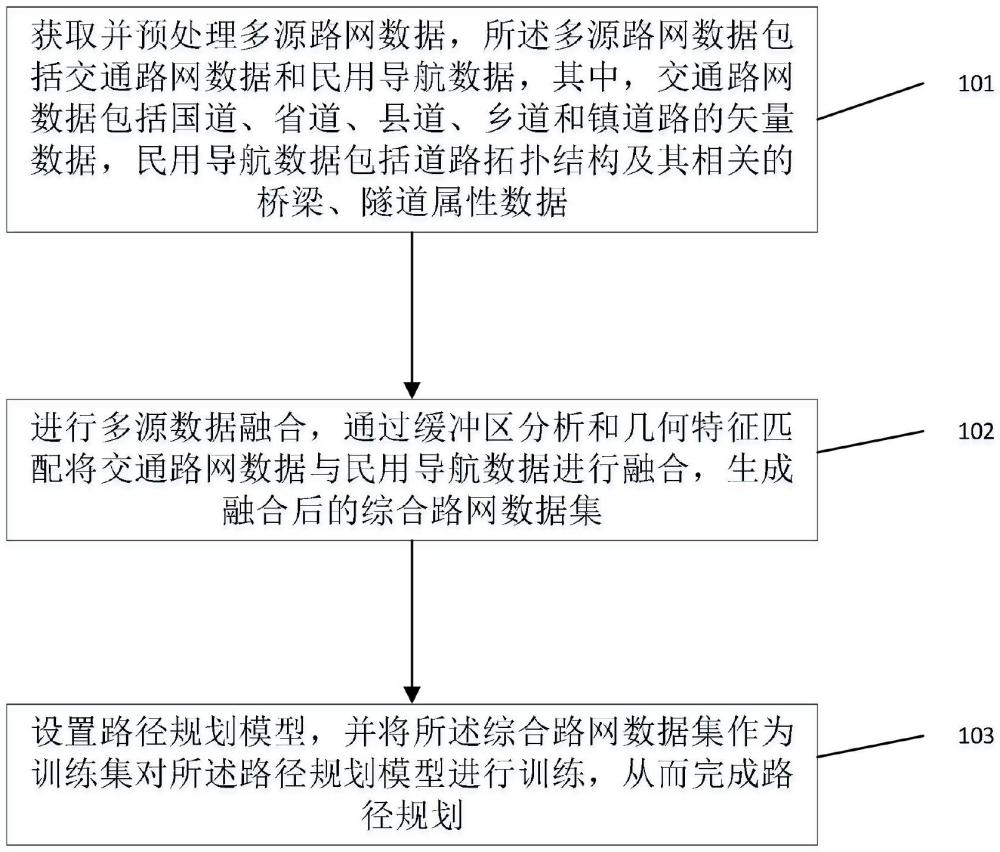
2、获取并预处理多源路网数据,所述多源路网数据包括交通路网数据和民用导航数据,其中,交通路网数据包括国道、省道、县道、乡道和镇道路的矢量数据,民用导航数据包括道路拓扑结构及其相关的桥梁、隧道属性数据;
3、进行多源数据融合,通过缓冲区分析和几何特征匹配将交通路网数据与民用导航数据进行融合,生成融合后的综合路网数据集;
4、设置路径规划模型,并将所述综合路网数据集作为训练集对所述路径规划模型进行训练,从而完成路径规划。
5、进一步的,所述路径规划模型包括:
6、
7、其中,为车辆导航指数,ttotal为总行驶时间指数,μ为通行概率的调整因子,ppass(s,t)为在时间t时位置s处的通行概率。
8、进一步的,ppass(s,t)为在时间t时位置s处的通行概率包括:
9、
10、其中,n为道路、桥梁或隧道的数量,σ为sigmoid函数,αi(t)为第i段道路、桥梁或隧道的第一调整因子,βi(t)为第i段道路、桥梁或隧道的第二调整因子,ari(s,t)为在时间t时位置s处第i段道路、桥梁或隧道的属性值,道路、桥梁或隧道的属性值包括最大承载重量、限高或宽度,avi为车辆的第i个特性参数,所述特性参数包括:车辆重量、车辆高度、或车辆宽度,δ为缓冲区调整因子,b(s)为位置s处的缓冲区参数,ζ为车流量调整因子,κ(s,t)为在时间t时位置s处车流量。
11、进一步的,总行驶时间指数ttotal包括:
12、
13、其中,l为总行驶路线长度,vopt(s,t)为在时间t时位置s处的最优速度,ρ为总行驶时间指数的第二调整因子,τ为总行驶时间指数的第一调整因子,ω为交通信号的变化频率,ξ为总行驶时间指数的第三调整因子。
14、进一步的,获取最小化的车辆导航指数后,将与最小化的车辆导航指数相对应的交通路网数据和民用导航数据,以导航的形式在用户终端进行显示。
15、本发明还提出一种基于多模态路网数据的车辆导航分析系统,包括:
16、获取数据模块,用于获取并预处理多源路网数据,所述多源路网数据包括交通路网数据和民用导航数据,其中,交通路网数据包括国道、省道、县道、乡道和镇道路的矢量数据,民用导航数据包括道路拓扑结构及其相关的桥梁、隧道属性数据;
17、数据融合模块,用于进行多源数据融合,通过缓冲区分析和几何特征匹配将交通路网数据与民用导航数据进行融合,生成融合后的综合路网数据集;
18、路径规划模块,用于设置路径规划模型,并将所述综合路网数据集作为训练集对所述路径规划模型进行训练,从而完成路径规划。
19、进一步的,所述路径规划模型包括:
20、
21、其中,为车辆导航指数,ttotal为总行驶时间指数,μ为通行概率的调整因子,ppass(s,t)为在时间t时位置s处的通行概率。
22、进一步的,ppass(s,t)为在时间t时位置s处的通行概率包括:
23、
24、其中,n为道路、桥梁或隧道的数量,σ为sigmoid函数,αi(t)为第i段道路、桥梁或隧道的第一调整因子,βi(t)为第i段道路、桥梁或隧道的第二调整因子,ari(s,t)为在时间t时位置s处第i段道路、桥梁或隧道的属性值,道路、桥梁或隧道的属性值包括最大承载重量、限高或宽度,avi为车辆的第i个特性参数,所述特性参数包括:车辆重量、车辆高度、或车辆宽度,δ为缓冲区调整因子,b(s)为位置s处的缓冲区参数,ζ为车流量调整因子,к(s,t)为在时间t时位置s处车流量。
25、进一步的,总行驶时间指数ttotal包括:
26、
27、其中,l为总行驶路线长度,vopt(s,t)为在时间t时位置s处的最优速度,ρ为总行驶时间指数的第二调整因子,τ为总行驶时间指数的第一调整因子,ω为交通信号的变化频率,ξ为总行驶时间指数的第三调整因子。
28、进一步的,获取最小化的车辆导航指数后,将与最小化的车辆导航指数相对应的交通路网数据和民用导航数据,以导航的形式在用户终端进行显示。
29、总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
30、本发明取得了基于交通路网与导航路网融合数据的特种车辆路径规划与导航功能的数据融合成果、用于移动端的地图快速浏览和查询功能的基础影像地图瓦片数据处理成果、交通图册数据库各类数据的标准化成果、纸质版交通图册(电子图片格式)的试点建设成果。
技术特征:
1.一种基于多模态路网数据的车辆导航分析方法,其特征在于,包括:
2.如权利要求1所述的一种基于多模态路网数据的车辆导航分析方法,其特征在于,所述路径规划模型包括:
3.如权利要求2所述的一种基于多模态路网数据的车辆导航分析方法,其特征在于,ppass(s,t)为在时间t时位置s处的通行概率包括:
4.如权利要求3所述的一种基于多模态路网数据的车辆导航分析方法,其特征在于,总行驶时间指数ttotal包括:
5.如权利要求4所述的一种基于多模态路网数据的车辆导航分析方法,其特征在于,获取最小化的车辆导航指数后,将与最小化的车辆导航指数相对应的交通路网数据和民用导航数据,以导航的形式在用户终端进行显示。
6.一种基于多模态路网数据的车辆导航分析系统,其特征在于,包括:
7.如权利要求6所述的一种基于多模态路网数据的车辆导航分析系统,其特征在于,所述路径规划模型包括:
8.如权利要求7所述的一种基于多模态路网数据的车辆导航分析系统,其特征在于,ppass(s,t)为在时间t时位置s处的通行概率包括:
9.如权利要求8所述的一种基于多模态路网数据的车辆导航分析系统,其特征在于,总行驶时间指数ttotal包括:
10.如权利要求9所述的一种基于多模态路网数据的车辆导航分析系统,其特征在于,获取最小化的车辆导航指数后,将与最小化的车辆导航指数相对应的交通路网数据和民用导航数据,以导航的形式在用户终端进行显示。
技术总结
本发明公开一种基于多模态路网数据的车辆导航分析方法及系统,该方法包括:获取并预处理多源路网数据,所述多源路网数据包括交通路网数据和民用导航数据,其中,交通路网数据包括国道、省道、县道、乡道和镇道路的矢量数据,民用导航数据包括道路拓扑结构及其相关的桥梁、隧道属性数据;进行多源数据融合,通过缓冲区分析和几何特征匹配将交通路网数据与民用导航数据进行融合,生成融合后的综合路网数据集;设置路径规划模型,并将所述综合路网数据集作为训练集对所述路径规划模型进行训练,从而完成路径规划。
技术研发人员:冯帅,任洪鹏,吴昊,王新征,陈玲俠,王然江,王松,李信
受保护的技术使用者:中国人民解放军96911部队
技术研发日:
技术公布日:2025/2/24
- 还没有人留言评论。精彩留言会获得点赞!