一种北斗/罗兰融合定位授时的方法
本发明属于通信,具体涉及一种北斗/罗兰融合定位授时的方法。
背景技术:
1、北斗卫星导航系统是中国自主研发、独立运行的全球卫星导航系统,是全球卫星导航系统的一部分。北斗三号系统提供全球覆盖的导航服务,不仅能够为中国及周边地区用户提供高精度服务,还可以为全球用户提供多样化的导航服务。目前北斗系统已经具有较高的性能,并且在交通运输、物流管理、农业自动化到紧急救援、公共安全和国防等领域发挥着重要作用。
2、尽管北斗系统在定位、导航和授时服务方面取得了显著成就,但是仍存在一些不足和挑战。在安全性层面,北斗系统面临各种安全威胁,包括干扰、欺骗攻击和网络攻击。这些攻击可能导致误导性定位信息,对交通、军事和其他关键应用造成严重影响。不仅如此,太空中的垃圾、飞行器残骸、陨石等都会威胁到卫星的安全。此外,现代社会对北斗系统的依赖程度很高,一旦系统出现故障或受到攻击,可能会对交通运输、通信、金融等关键基础设施造成重大影响。
3、国际上广泛认为,罗兰系统是最适合用作星基导航授时系统的备份系统,要建设长波系统来做卫星导航系统的备份,以应对信号失常等状态。然而,使用罗兰系统作简单的备份也无法完全解决问题。为了提供导航定位授时系统的可用性,可以考虑将北斗信号与罗兰信号相融合,使用融合后的信号进行定位授时。
4、现有技术中提出了使用北斗系统与罗兰单站进行组合定位,并提出了校正-融合的组合定位算法用以修正罗兰c系统误差。该方法实现了三颗及以上数量的卫星与一个罗兰台站的融合定位。该方法仅仅实现了三颗北斗卫星与一个罗兰台站的融合,而现实中还会存在北斗卫星数量少于三颗的情况。因此这一方法无法满足所有情况下的北斗系统与罗兰系统的融合定位授时的需求。
技术实现思路
1、本发明所要解决的技术问题是:
2、为了避免单一的卫星系统出现故障以后导致交通、通信、金融等领域出现故障的问题,提高系统的可用性,本发明提出一种北斗/罗兰融合定位授时的方法,用于解决可用卫星数量不同时的北斗系统/罗兰系统融合。
3、为了解决上述技术问题,本发明采用的技术方案为:
4、一种基于vincenty公式的罗兰伪距授时定位方法,其特征在于,采用卫星与罗兰台站融合的方式进行定位授时,公式如下:
5、
6、其中,ρ1-ρn为接收机测量到的n个卫星伪距,n≥4,ρl1-ρlm为接收机测量到的m个罗兰台站的伪距,m>0;(x1,y1,z1)-(xn,yn,zn)表示北斗系统卫星发射台的位置,(xl1,yl1,zl1)-(xlm,y lm,z lm)表示罗兰系统发射台的位置;δt表示接收机的钟差;xr,yr,zr表示接收机坐标;c为光速;ε1-εn,εl1-εlm为其他误差;
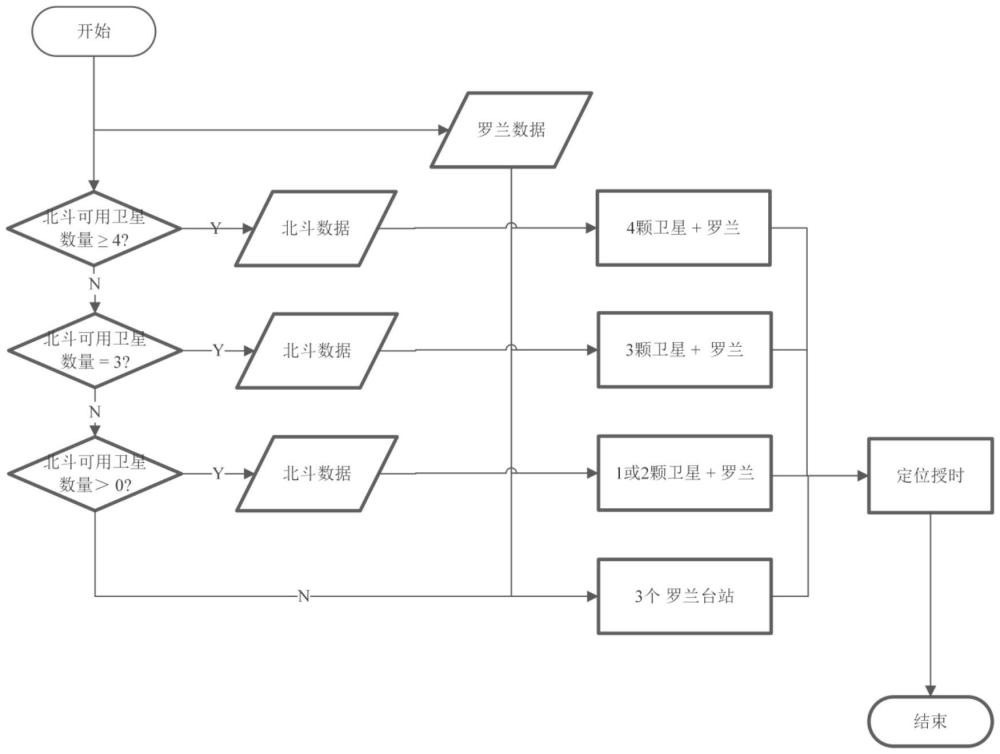
7、根据检测可用卫星的数量选择对应的罗兰数量,使得卫星与罗兰的数量之和至少等于4;根据卫星和罗兰的数量调整上述方程组的方程。
8、本发明进一步的技术方案:根据卫星和罗兰的数量调整上述方程组的方程,包括:
9、若检测到只有三颗可用卫星,则采用三颗卫星与罗兰融合的方式,进行定位授时,公式如下:
10、
11、若检测到只有两颗可用卫星,则采用两颗卫星与罗兰融合的方式,进行定位授时,公式如下:
12、
13、若没有检测到可用卫星,则将进行单独的罗兰台站定位授时。
14、本发明进一步的技术方案:所述单独的罗兰台站定位授时,采用基于vincenty公式的罗兰伪距授时定位方法,包括:
15、选取播发信号范围包含接收机位置的罗兰台链,获取罗兰台链中一个主台站与两个副台站的经纬度坐标;
16、使用接收机测量三个台站发射信号到达接收机的到达时间;
17、根据三个台站的经纬度坐标、到达时间和接收机的初始坐标,基于vincenty测距公式解算新的接收机的坐标和时间;
18、将新的接收机的坐标由椭球参考面转化到实际地球表面的经纬度,即得到接收机坐标与时间。
19、本发明进一步的技术方案:所述根据三个台站的经纬度坐标、到达时间和接收机的初始坐标,基于vincenty测距公式解算新的坐标和时间;包括:
20、获取接收机初始坐标;
21、使用三个台站的经纬度坐标表示vincenty测距公式,基于vincenty测距公式构建微分方程组;
22、将微分方程组在初始坐标处进行一阶泰勒展开得到偏微分方程组;
23、设置迭代收敛门限,对偏微分方程组进行迭代解算得到接收机位置和时间。
24、本发明进一步的技术方案:所述微分方程组,具体为:
25、
26、其中,ρi表示接收机测出的伪距,表示vincenty测距公式,ti表示接收机时差,δi表示其他误差项,c为光速。
27、本发明进一步的技术方案:所述偏微分方程组,具体为:
28、
29、其中,di为真实距离,为到达时间和光速的乘积,ρi0为罗兰台站到接收机的伪距,为ρ对λ、t的偏导数在ρi0处的取值,δλ、δt为λ、t的变化量。
30、一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现上述的方法。
31、一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现上述的方法。
32、一种计算机程序产品,其特征在于包括计算机可执行指令,所述指令在被执行时用于实现上述的方法。
33、本发明的有益效果在于:
34、本发明提供的一种北斗/罗兰融合定位授时的方法,解决了可用卫星数量不同时的北斗系统/罗兰系统融合,当可用卫星数量不少于四颗、只有三颗、只有两颗或一颗以及没有可用卫星时,提出了使用罗兰系统增强北斗系统的方法、即三颗卫星与罗兰融合的方法以及两颗/一颗卫星与罗兰融合的方法。
35、本发明还提出了从地心地固坐标系到直角坐标系的转换方法,因为有这个坐标的转换,才能将卫星和罗兰结合起来,用于伪距地解算。
36、本发明方法可以为单一的北斗系统添加备份,避免其一旦卫星不可用时,采用罗兰同样可以解算,解决了由于卫星的突然失灵带来的停止定位授时系统服务的风险;提高了定位授时系统的抗干扰能力,并提高其稳定性;是维护国家国防安全的重要需求。
技术特征:
1.一种基于vincenty公式的罗兰伪距授时定位方法,其特征在于,采用卫星与罗兰台站融合的方式进行定位授时,公式如下:
2.根据权利要求1所述一种基于vincenty公式的罗兰伪距授时定位方法,其特征在于,根据卫星和罗兰的数量调整上述方程组的方程,包括:
3.根据权利要求2所述一种基于vincenty公式的罗兰伪距授时定位方法,其特征在于,所述单独的罗兰台站定位授时,采用基于vincenty公式的罗兰伪距授时定位方法,包括:
4.根据权利要求3所述一种基于vincenty公式的罗兰伪距授时定位方法,其特征在于,所述根据三个台站的经纬度坐标、到达时间和接收机的初始坐标,基于vincenty测距公式解算新的坐标和时间;包括:
5.根据权利要求4所述一种基于vincenty公式的罗兰伪距授时定位方法,其特征在于,所述微分方程组,具体为:
6.根据权利要求5所述一种基于vincenty公式的罗兰伪距授时定位方法,其特征在于,所述偏微分方程组,具体为:
7.一种计算机系统,其特征在于包括:一个或多个处理器,计算机可读存储介质,用于存储一个或多个程序,其中,当所述一个或多个程序被所述一个或多个处理器执行时,使得所述一个或多个处理器实现权利要求1所述的方法。
8.一种计算机可读存储介质,其特征在于存储有计算机可执行指令,所述指令在被执行时用于实现权利要求1所述的方法。
9.一种计算机程序产品,其特征在于包括计算机可执行指令,所述指令在被执行时用于实现权利要求1所述的方法。
技术总结
本发明涉及一种北斗/罗兰融合定位授时的方法,属于通信技术领域。包括:若检测到可用卫星数量不少于四颗,则使用可用卫星与罗兰台站融合的方式,进行定位授时,此时解算时仅使用卫星,罗兰备用;若检测到可用卫星数量不足四颗,但是有三颗,则使用罗兰补齐四颗进行定位授时;若没有检测到可用卫星,则将进行单独的罗兰定位授时。本发明可以为单一的北斗系统添加备份,避免其一旦卫星不可用时,采用罗兰同样可以解算,解决了由于卫星的突然失灵带来的停止定位授时系统服务的风险;提高了定位授时系统的抗干扰能力,并提高其稳定性。
技术研发人员:吴华兵,李璟灵,武建锋
受保护的技术使用者:中国科学院国家授时中心
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!