一种避障激光探测装置点云电力线检测方法与流程
本发明属于激光探测,具体涉及一种避障激光探测装置点云电力线检测方法。
背景技术:
1、针对运动条件下在复杂环境和恶劣视觉条件下对外部环境的探测感知需求,需要开展避障辅助决策技术研究,设计一种避障激光探测装置点云电力线检测方法。
技术实现思路
1、(一)要解决的技术问题
2、本发明要解决的技术问题是:为满足避障需求,提出一种避障激光探测装置电力线检测方法。
3、(二)技术方案
4、为了解决上述技术问题,本发明提供了一种避障激光探测装置点云电力线检测方法,包括以下步骤:
5、步骤1、提取有效激光点云数据,去除原始点云数据中的无限远点;
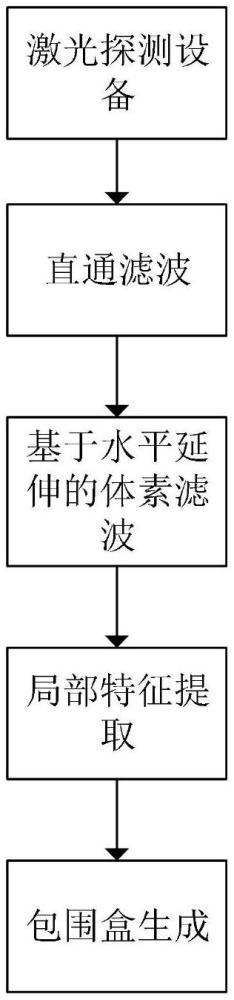
6、步骤2、通过直通滤波器对原始点云进行裁剪,去除无回波点,根据高度进行高程滤波,去除地面点;
7、步骤3、基于水平延伸的体素滤波:计算刚好包裹点云的长方体,将长方体分割成不同高度的扁平的小长方体,计算小长方体的质心,并用该质心的坐标来近似该长方体内的若干点,并在此基础上设置坐标点数量阈值,当长方体中的点少于该阈值时,将该点滤除;
8、步骤4、基于局部特征的电力线检测:遍历点云中的每个点pi,构建点pi的邻域ni,计算邻域的中心以及邻域协方差矩阵,并计算点云中该点ni的特征值,根据重要程度确定点ni的主要成分,分离出电力线与其他物体;
9、步骤5、三维点云包围盒生成:首先计算点云的协方差矩阵,将协方差矩阵对角化,计算出特征值,并将对应的三个特征向量正交标准化,得到的三个正交标准化后的特征向量即为电力线的包围盒的三个坐标轴方向;
10、步骤6、得到包围盒的三个坐标轴方向后,将目标的所有三维点云用这三个坐标轴进行表示,同时求出点云在三个坐标轴上的投影值,也就得到了包围盒的长、宽、高,以及中心坐标点,完成点云电力线检测。
11、优选地,步骤1中,采用激光探测装置进行点云采集,并且通过imu姿态传感器获取姿态角度信息,进行点云累计,然后提取有效激光点云数据。
12、优选地,所述激光探测装置采用椭圆扫描和方位摆扫二位扫描方式工作。
13、本发明还提供了一种用于实现所述方法的系统。
14、本发明还提供了一种基于所述方法实现的避障辅助决策方法。
15、(三)有益效果
16、本发明针对运动条件下在复杂环境和恶劣视觉条件下对外部环境的探测感知需求,利用激光三维成像探测方式的技术特点,开展避障辅助决策技术研究,提出了一种避障激光探测装置点云电力线检测方法。该方法是一种基于激光探测装置的点云电力线检测方法,通过主动三维成像探测,对电力线进行检测,能够满足运动条件下的避障需求,有效提高了电力线检测能力,能够为人员提供稳定可靠的环境和态势感知能力,保障安全。
技术特征:
1.一种避障激光探测装置点云电力线检测方法,其特征在于,包括以下步骤:
2.如权利要求1所述的方法,其特征在于,步骤1中,采用激光探测装置进行点云采集,并且通过imu姿态传感器获取姿态角度信息,进行点云累计,然后提取有效激光点云数据。
3.如权利要求2所述的方法,其特征在于,所述激光探测装置采用椭圆扫描和方位摆扫二位扫描方式工作。
4.如权利要求3所述的方法,其特征在于,所述激光探测装置的视场范围为41.2°×30°,最远探测距离为1500m。
5.如权利要求1至4中任一项所述的方法,其特征在于,该方法在激光探测技术领域中应用。
6.一种用于实现如权利要求1至5中任一项所述方法的系统。
7.如权利要求6所述的系统,其特征在于,该系统在激光探测技术领域中应用。
8.一种基于如权利要求1至5中任一项所述方法实现的避障辅助决策方法。
技术总结
本发明涉及一种避障激光探测装置点云电力线检测方法,属于激光探测技术领域。本发明针对运动条件下在复杂环境和恶劣视觉条件下对外部环境的探测感知需求,利用激光三维成像探测方式的技术特点,开展避障辅助决策技术研究,提出了一种避障激光探测装置点云电力线检测方法。该方法是一种基于激光探测装置的点云电力线检测方法,通过主动三维成像探测,对电力线进行检测,能够满足运动条件下的避障需求,有效提高了电力线检测能力,能够为人员提供稳定可靠的环境和态势感知能力,保障安全。
技术研发人员:王显哲,周魁
受保护的技术使用者:天津津航技术物理研究所
技术研发日:
技术公布日:2025/2/13
- 还没有人留言评论。精彩留言会获得点赞!