一种非球面光学主镜中心轴偏移角度的计算方法
本发明涉及角度的计算方法,具体涉及一种非球面光学主镜中心轴偏移角度的计算方法。
背景技术:
1、在现代光学系统中,非球面光学元件因其卓越的成像质量和紧凑的设计而被广泛应用。非球面光学主镜作为许多高端光学系统的核心组件,其成像精度直接决定了整个光学系统的性能。然而,在实际应用中,由于加工和装配过程中的误差,非球面光学主镜中心轴可能会发生偏移。这种偏移现象往往会导致成像质量显著下降,在高空间分辨率和高光谱分辨率的应用场景中尤为明显。
2、目前,针对非球面光学主镜中心轴偏移的检测和校正方法仍面临诸多技术挑战。传统的检测方法往往依赖于复杂的机械装置和繁琐的手动调整过程,不仅耗时耗力,而且难以达到所需的高精度要求。此外,随着光学系统向更高精度和更大口径的发展,传统方法的局限性愈发明显。因此,开发一种高效、精确的非球面光学主镜中心轴偏移检测与校正方法,已成为提升光学系统成像质量、降低装配难度、提高生产效率的关键技术需求。
技术实现思路
1、本发明的目的在于解决非球面光学主镜装配过程中由于中心轴偏移导致成像质量下降的技术问题,而提供一种非球面光学主镜中心轴偏移角度的计算方法。
2、为了实现上述目的,本发明采用如下技术方案:
3、一种非球面光学主镜中心轴偏移角度的计算方法,其特殊之处在于,包括以下步骤:
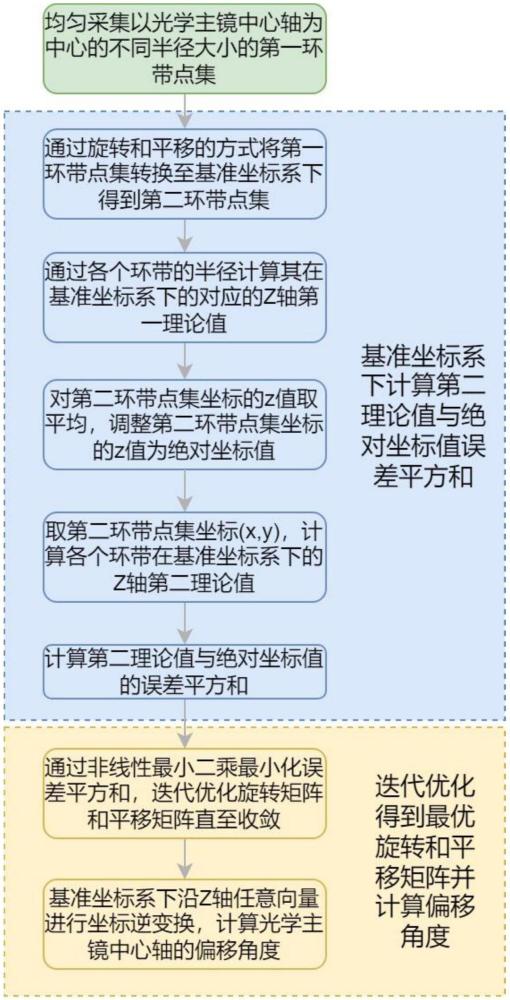
4、步骤1、以非球面光学主镜中心轴的轴线为z轴任意建立三维坐标系,采集其中心轴上m个环带对应的第一环带点集pki=(xki,yki,zki);每个环带对应的半径rk均不相同,且每个环带上共采集n个点;m≥2,n≥3;其中,(xki,yki,zki)表示第k个环带的第i个点坐标,k=1,2,…,m,i=1,2,…,n;
5、步骤2、通过旋转和平移的方式将采集的第一环带点集pki=(xki,yki,zki)转换至基准坐标系:
6、pki′=r·pki+t;
7、其中,旋转矩阵平移矩阵
8、得到第二环带点集pki'=(xki',yki',zki');
9、步骤3、计算绝对坐标值zki”;
10、3.1)通过各个环带的半径rk计算各个环带在基准坐标系下的对应的z轴第一理论值
11、
12、其中,s表示非球面光学主镜镜面的曲率半径,t表示锥形常数;
13、3.2)对同一第二环带点集pki'中的zki'取平均值
14、3.3)将第二环带点集pki'中的坐标zki'调整为绝对坐标值
15、步骤4、计算误差平方和;
16、4.1)取第二环带点集pki'中各点坐标(xki',yki',zki')中的坐标(xki',yki'),计算各个环带在基准坐标系下对应的z轴第二理论值
17、
18、4.2)计算第二理论值和绝对坐标值zki”的误差平方和e(r,t):
19、
20、步骤5、通过非线性最小二乘法最小化误差平方和e(r,t),得到优化后的旋转矩阵和平移矩阵
21、步骤6、重复步骤2~步骤5,并在每次重复时用步骤5得到的旋转矩阵和平移矩阵对应替换步骤2中的旋转矩阵r和平移矩阵t,直至e(r,t)小于预设值即收敛,最终得到的旋转矩阵和平移矩阵则为最优旋转矩阵r'和平移矩阵t';
22、步骤7、计算偏移向量v':
23、v'=r'transpose·(v-t');
24、其中,v为基准坐标系下沿光学主镜中心轴方向的任意向量;
25、步骤8、计算光学主镜中心轴的偏移角度θ:
26、
27、其中,<v,v'>表示向量v和向量v'的内积,||v||和||v'||分别表示向量v和向量v'的模长。
28、进一步地,步骤1中:
29、m=5。
30、进一步地,步骤1中:
31、5个环带对应的半径分别为r1=150mm,r2=225mm,r3=260mm,r4=280mm,r5=300mm。
32、进一步地,步骤1中:
33、n=12。
34、进一步地,步骤1中,所述每个环带上共采集n个点,具体为:
35、每个环带上均匀采集n个点。
36、进一步地,步骤2具体为:
37、采用以下公式通过旋转和平移的方式将采集的第一环带点集pki转换至基准坐标系:
38、pki′=r·pki+t;
39、其中,旋转矩阵r为分别绕x轴、y轴、z轴旋转α、β、γ角度,公式如下:
40、
41、平移矩阵t为分别沿x轴、y轴、z轴平移a、b、c距离,公式如下:
42、
43、得到第二环带点集pki'=(xki',yki',zki')。
44、本发明的有益效果:
45、1、本发明提供的一种非球面光学主镜中心轴偏移角度的计算方法,能够有效进行中心轴偏移的检测和校正,提升光学系统成像质量、降低装配难度、提高生产效率,其灵活性和适应性使其在各种高端光学应用场景中均表现出色,对不同尺寸和形状的非球面光学主镜均具有适用性,无论是小型还是大型光学系统,适用于广泛的光学设备和仪器。
46、2、本发明的方法具备良好的兼容性和扩展性,易与其他光学检测系统集成,便于进一步扩展功能,比如与其他自动调整装置结合,实现闭环控制系统。
47、3、本发明提供的一种非球面光学主镜中心轴偏移角度的计算方法,能够采用自动化测量和分析流程,相较于传统的人工调整方法,极大简化了检测流程。不仅降低了操作人员的技术要求,还显著减少了人为误差,提高了整体工作效率和检测精度。
技术特征:
1.一种非球面光学主镜中心轴偏移角度的计算方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的非球面光学主镜中心轴偏移角度的计算方法,其特征在于,步骤1中:
3.根据权利要求2所述的非球面光学主镜中心轴偏移角度的计算方法,其特征在于,步骤1中:
4.根据权利要求1或2或3所述的非球面光学主镜中心轴偏移角度的计算方法,其特征在于,步骤1中:
5.根据权利要求4所述的非球面光学主镜中心轴偏移角度的计算方法,其特征在于,步骤1中,所述每个环带上共采集n个点,具体为:
6.根据权利要求5所述的非球面光学主镜中心轴偏移角度的计算方法,其特征在于,步骤2具体为:
技术总结
本发明公开了一种非球面光学主镜中心轴偏移角度的计算方法,解决了非球面光学主镜装配过程中由于中心轴偏移导致成像质量下降的技术问题,本发明提供的一种非球面光学主镜中心轴偏移角度的计算方法,能够有效进行中心轴偏移的检测和校正,提升光学系统成像质量、降低装配难度、提高生产效率,其灵活性和适应性使其在各种高端光学应用场景中均表现出色,对不同尺寸和形状的非球面光学主镜均具有适用性,无论是小型还是大型光学系统,适用于广泛的光学设备和仪器。
技术研发人员:王泽辉,冯向朋,刘科为,刘学斌,赵强,王一豪,陈军宇,程娟,赵航,张耿,王爽,李思远
受保护的技术使用者:中国科学院西安光学精密机械研究所
技术研发日:
技术公布日:2025/2/10
- 还没有人留言评论。精彩留言会获得点赞!