无人机电气测速系统的制作方法
本发明具体涉及一种无人机电气测速系统。
背景技术:
1、目前,无人机测速主要采用以下几种常见方案:
2、1、基于卫星定位系统(如gps)的测速:依赖接收卫星信号来计算无人机速度,其原理是通过卫星信号的多普勒频移等信息来推算无人机相对于卫星的运动速度。
3、2、基于空气动力学原理的测速:主要借助传感器测量气流压力、风速等参数,再依据空气动力学相关公式来推算无人机的飞行速度。
4、3、基于光学传感器(如摄像头)的测速:利用摄像头等光学设备采集图像,通过分析图像中特定物体(如地面纹理、标志物等)在连续帧之间的移动距离和时间关系来估计无人机速度。
5、然而,卫星定位系统测速易受信号遮挡、干扰,在高楼林立、山区等环境中精度下降。空气动力学测速对环境条件要求高,气流变化会影响测量结果的准确性。光学传感器测速在光线不佳(如夜晚、逆光)时性能受限,且图像处理计算量大。
6、也有部分现有技术采用编码器进行测速,但是编码器易受环境因素影响,在复杂环境中精度可能降低。
技术实现思路
1、本发明提供了无人机电气测速系统解决上述提到的技术问题,具体采用如下的技术方案:
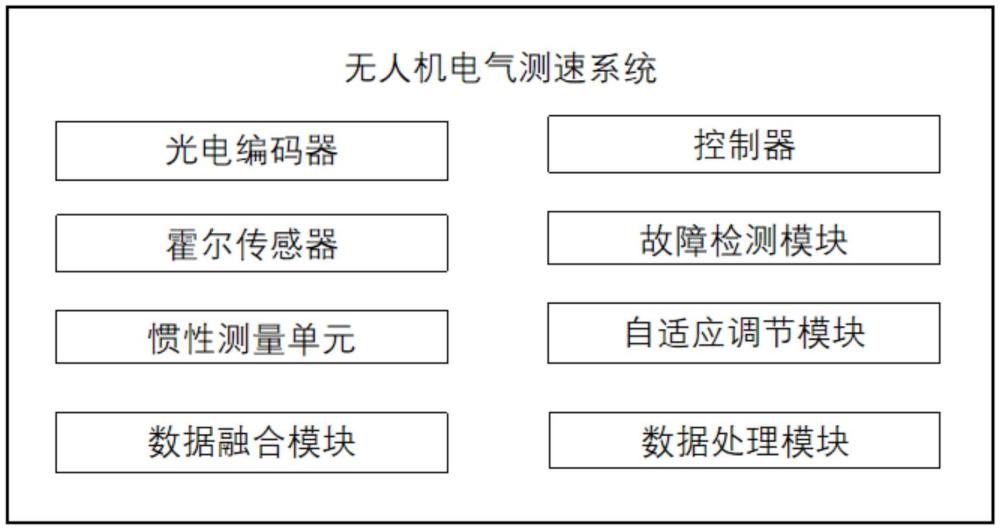
2、一种无人机电气测速系统,包含:
3、光电编码器,用于采集无人机的第一速度数据;
4、霍尔传感器,用于采集无人机的第二速度数据;
5、惯性测量单元,用于采集无人机的第三速度数据;
6、数据融合模块,用于接收所述光电编码器、所述霍尔传感器和所述惯性测量单元采集的第一速度数据、第二速度数据和第三速度数据,并对所述第一速度数据、所述第二速度数据和所述第三速度数据进行数据融合得到融合速度;
7、控制器,用于接收所述融合速度,并基于所述融合速度控制无人机。
8、进一步地,所述数据融合模块通过下述公式对所述第一速度数据、所述第二速度数据和所述第三速度数据进行数据融合:
9、v=av1+bv2+cv3,a+b+c=1,a,b,c>0
10、其中,v为所述融合速度,v1为所述第一速度数据,v2为所述第二速度数据,v3为所述第三速度数据,a,b,c分别为所述第一速度数据、所述第二速度数据和所述第三速度数据的计算权重。
11、进一步地,a大于b和c。
12、进一步地,所述无人机电气测速系统还包含:
13、故障检测模块,用于检测所述光电编码器的状态;
14、所述数据融合模块在所述光电编码器处于正常状态时,对所述第一速度数据、所述第二速度数据和所述第三速度数据进行数据融合得到所述融合速度;
15、所述数据融合模块在所述光电编码器处于异常状态时,对所述第二速度数据和所述第三速度数据进行数据融合得到所述融合速度。
16、进一步地,所述故障检测模块检测所述光电编码器的信号强度和所述第一速度数据的波动范围,在所述信号强度低于预设强度和/或所述第一速度数据的波动范围超过预设值时,判定所述光电编码器的状态为异常状态。
17、进一步地,所述数据融合模块通过下述公式对所述第二速度数据和所述第三速度数据进行数据融合:
18、v=dv2+ev3,d+e=1,d,e>0
19、其中,v为所述融合速度,v2为所述第二速度数据,v3为所述第三速度数据,d和e分别为所述第二速度数据和所述第三速度数据的计算权重。
20、进一步地,所述无人机电气测速系统还包含:
21、自适应调节模块,用于根据无人机环境状态调节所述数据融合模块的数据融合方式。
22、进一步地,所述自适应调节模块根据无人机环境状态调节所述第二速度数据和所述第三速度数据的计算权重。
23、进一步地,所述无人机电气测速系统还包含:
24、数据处理模块,用于对所述第一速度数据、所述第二速度数据和所述第三速度数据进行滤波和校正处理,并将处理后的所述第一速度数据、所述第二速度数据和所述第三速度数据发送至所述数据融合模块。
25、进一步地,所述数据处理模块根据无人机的飞行状态和环境状态动态调节对所述第一速度数据、所述第二速度数据和所述第三速度数据进行校正的校正参数。
26、本发明的有益之处在于所提供的无人机电气测速系统,融合了光电编码器、霍尔传感器和惯性测量单元的速度数据,能够大幅减少测量误差,提供更准确的速度信息。
27、本发明的有益之处还在于所提供的无人机电气测速系统,具有模式切换功能,能够在光电编码器异常时,舍弃光电编码器的检测数据,从而减小了环境的干扰。
技术特征:
1.一种无人机电气测速系统,其特征在于,包含:
2.根据权利要求1所述的无人机电气测速系统,其特征在于,
3.根据权利要求2所述的无人机电气测速系统,其特征在于,
4.根据权利要求1所述的无人机电气测速系统,其特征在于,
5.根据权利要求4所述的无人机电气测速系统,其特征在于,
6.根据权利要求4所述的无人机电气测速系统,其特征在于,
7.根据权利要求1-6任一所述的无人机电气测速系统,其特征在于,
8.根据权利要求7所述的无人机电气测速系统,其特征在于,
9.根据权利要求1所述的无人机电气测速系统,其特征在于,
10.根据权利要求9所述的无人机电气测速系统,其特征在于,
技术总结
本发明公开了一种无人机电气测速系统,包括:光电编码器,用于采集无人机的第一速度数据;霍尔传感器,用于采集无人机的第二速度数据;惯性测量单元,用于采集无人机的第三速度数据;数据融合模块,用于接收光电编码器、霍尔传感器和惯性测量单元采集的第一速度数据、第二速度数据和第三速度数据,并对第一速度数据、第二速度数据和第三速度数据进行数据融合得到融合速度;控制器,用于接收融合速度,并基于融合速度控制无人机。本发明的无人机电气测速系统,融合了光电编码器、霍尔传感器和惯性测量单元的速度数据,能够大幅减少测量误差,提供更准确的速度信息。
技术研发人员:杜文宇,田磊,陈涛,周纪恩,张朝阳,吴建国,张宇
受保护的技术使用者:杭州牧星科技有限公司
技术研发日:
技术公布日:2024/12/19
- 还没有人留言评论。精彩留言会获得点赞!