一种多功能室内建筑测量方法与流程
本发明涉及室内建筑测量领域,尤其涉及一种多功能室内建筑测量方法。
背景技术:
1、在房屋结构建造过程中,需要按时对其室内的墙面、地面和天花板进行线面测量,例如墙面的垂直度、平整度,地面的水平度极差、平整度等等。目前主流的测量方式主要如下:
2、1)人工测量,采用2米靠尺、塞尺、塔尺、水平仪、钢尺、钢卷尺等工具进行多次测量,测量仪器种类多,更换复杂;对测量人员的专业性要求高,步骤复杂,人工成本高;测量指标以线代面,测量覆盖密度不足;手工输入数据为主,需要后期处理;测量人员需2人(1人测量,1人录入数据);
3、2)三维扫描测量,技术局冗余大,精度不足,价格昂贵(一般在8-30万左右),而且也需要二次数据开发。
技术实现思路
1、本发明的目的是提供一种多功能室内建筑测量方法,仅需一人即可操作,使用简单,测量准确,而且数据录入效率高。
2、为实现上述目的,本发明提供一种多功能室内建筑测量方法,将一组多个沿直线并列布置的第一测距传感器组成测距扫描阵列;让测距扫描阵列沿平行于建筑平面的方向平移,该过程中通过各第一测距传感器获取其与待测建筑平面的间距作为第一距离数据,同时通过第二测距传感器对测距扫描阵列平移的实时位置进行监测并获取第二距离数据,通过角度测量仪获取测距扫描阵列相对水平面的夹角数据;然后通过控制器收集所述第一距离数据、第二距离数据、夹角数据。
3、作为本发明的进一步改进,各所述第一测距传感器的朝向相平行且等间距布置,第一测距传感器的朝向与各第一测距传感器的排列方向相垂直。
4、作为本发明的更进一步改进,所述测距扫描阵列中各第一测距传感器的排列方向与测距扫描阵列的平移方向相垂直,第一测距传感器的朝向与所述测距扫描阵列的平移方向相垂直。
5、作为本发明的更进一步改进,所述第一测距传感器为第一激光距离传感器。
6、作为本发明的更进一步改进,所述第二测距传感器为第二激光距离传感器,其与地面相对固定;第二激光距离传感器的朝向与测距扫描阵列的平移方向相平行,在测距扫描阵列的一侧设置有与其相对固定的标靶,第二激光距离传感器朝向标靶;当测距扫描阵列平移时,第二激光距离传感器对标靶的实时位置进行测距并将其作为第二距离数据。
7、作为本发明的更进一步改进,在对建筑平面进行测量前,通过让所述测距扫描阵列相对水平面旋转一定角度,使测距扫描阵列上的每个第一测距传感器的测距点均能落在待测建筑平面上;测距扫描阵列的旋转轴线平行于测距扫描阵列的平移方向。
8、作为本发明的更进一步改进,所述测距扫描阵列在平移时,测距扫描阵列的一端通过导轨进行导向,测距扫描阵列的另一端通过行走轮支撑在待测建筑平面上。
9、作为本发明的更进一步改进,所述角度测量仪为陀螺仪,陀螺仪与测距扫描阵列两者位置相对固定。
10、有益效果
11、与现有技术相比,本发明的多功能室内建筑测量方法的优点为:
12、1、通过平移测距机构带动安装架上的多个呈直线排列的第一激光距离传感器一起相对墙面或地面移动,并让第一激光距离传感器将测量结果通过控制器传输给软件端,即可获取多组距离数据。此外,安装架每次平移前,通过旋转支座改变第一激光距离传感器相对水平面的激光出射角度,而陀螺仪可获取夹角数据并通过控制器传输给软件端。该测量过程仅需一人操作,可减少测量人员,对人员的专业测量水平要求低,有利于降低人工成本;设备简单,生产成本低,可控制在一万元以下;测量精度高,测量错误几率低;可实现多指标同步测量,有利于后期通过软件同步计算出相应数据,测量效率高。
13、2、第一测距传感器为第一激光距离传感器,第二测距传感器为第二激光距离传感器,采用激光测距的方式其精度高,且没有噪音。
14、3、测距扫描阵列在平移时,测距扫描阵列的一端通过导轨进行导向,测距扫描阵列的另一端通过行走轮支撑在待测建筑平面上,可确保测距扫描阵列平移时的稳定性,尽可能避免因晃动导致的测量数据不精确的问题。
15、通过以下的描述并结合附图,本发明将变得更加清晰,这些附图用于解释本发明的实施例。
技术特征:
1.一种多功能室内建筑测量方法,其特征在于,将一组多个沿直线并列布置的第一测距传感器组成测距扫描阵列;让测距扫描阵列沿平行于建筑平面的方向平移,该过程中通过各第一测距传感器获取其与待测建筑平面的间距作为第一距离数据,同时通过第二测距传感器对测距扫描阵列平移的实时位置进行监测并获取第二距离数据,通过角度测量仪获取测距扫描阵列相对水平面的夹角数据;然后通过控制器收集所述第一距离数据、第二距离数据、夹角数据。
2.根据权利要求1所述的一种多功能室内建筑测量方法,其特征在于,各所述第一测距传感器的朝向相平行且等间距布置,第一测距传感器的朝向与各第一测距传感器的排列方向相垂直。
3.根据权利要求2所述的一种多功能室内建筑测量方法,其特征在于,所述测距扫描阵列中各第一测距传感器的排列方向与测距扫描阵列的平移方向相垂直,第一测距传感器的朝向与所述测距扫描阵列的平移方向相垂直。
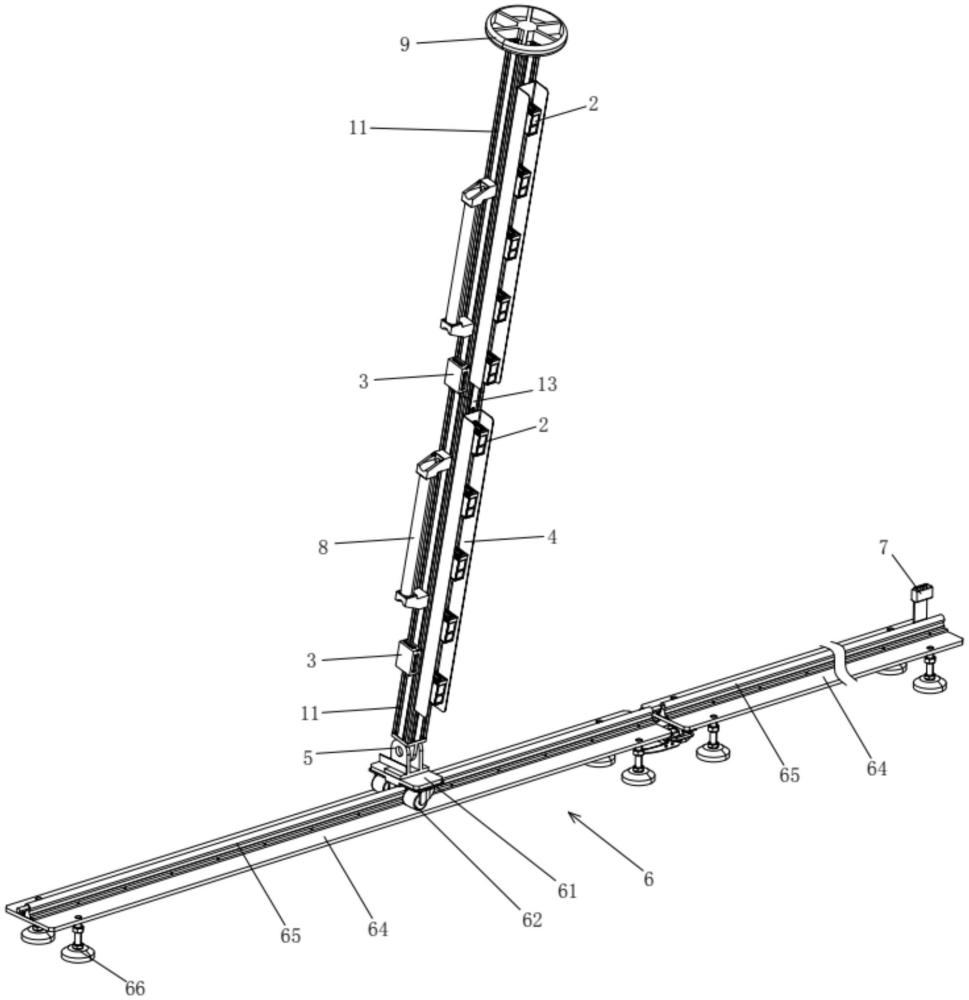
4.根据权利要求1或2或3所述的一种多功能室内建筑测量方法,其特征在于,所述第一测距传感器为第一激光距离传感器(2)。
5.根据权利要求1所述的一种多功能室内建筑测量方法,其特征在于,所述第二测距传感器为第二激光距离传感器(7),其与地面相对固定;第二激光距离传感器(7)的朝向与测距扫描阵列的平移方向相平行,在测距扫描阵列的一侧设置有与其相对固定的标靶,第二激光距离传感器(7)朝向标靶;当测距扫描阵列平移时,第二激光距离传感器(7)对标靶的实时位置进行测距并将其作为第二距离数据。
6.根据权利要求1所述的一种多功能室内建筑测量方法,其特征在于,在对建筑平面进行测量前,通过让所述测距扫描阵列相对水平面旋转一定角度,使测距扫描阵列上的每个第一测距传感器的测距点均能落在待测建筑平面上;测距扫描阵列的旋转轴线平行于测距扫描阵列的平移方向。
7.根据权利要求6所述的一种多功能室内建筑测量方法,其特征在于,所述测距扫描阵列在平移时,测距扫描阵列的一端通过导轨(65)进行导向,测距扫描阵列的另一端通过行走轮(9)支撑在待测建筑平面上。
8.根据权利要求1所述的一种多功能室内建筑测量方法,其特征在于,所述角度测量仪为陀螺仪(3),陀螺仪(3)与测距扫描阵列两者位置相对固定。
技术总结
本发明公开了一种多功能室内建筑测量方法,将一组多个沿直线并列布置的第一测距传感器组成测距扫描阵列;让测距扫描阵列沿平行于建筑平面的方向平移,该过程中通过各第一测距传感器获取其与待测建筑平面的间距作为第一距离数据,同时通过第二测距传感器对测距扫描阵列平移的实时位置进行监测并获取第二距离数据,通过角度测量仪获取测距扫描阵列相对水平面的夹角数据;然后通过控制器收集所述第一距离数据、第二距离数据、夹角数据。本发明提供的多功能室内建筑测量方法,仅需一人即可操作,使用简单,测量准确,而且数据录入效率高。
技术研发人员:何涛,张晓昆
受保护的技术使用者:深圳市弘丞科技有限公司
技术研发日:
技术公布日:2024/12/30
- 还没有人留言评论。精彩留言会获得点赞!