一种自适应智能调参的北斗惯导融合定位方法及系统
本发明涉及卫星导航领域,尤其涉及一种自适应智能调参的北斗惯导融合定位方法及系统。
背景技术:
1、近年来,北斗卫星定位导航系统(beidounavigation satellite system,bds)已经实现了全球服务,并能够在开阔地区实现分米甚至厘米级的定位精度。如今,北斗系统由于其覆盖面广和定位精度高等优势被广泛应用于交通运输、农林渔业、军事应用、救灾减灾等领域。然而,在遮挡环境,如高楼大厦、高速隧道和立交桥下,卫星信号与差分信号会因为受到遮挡而无法顺利到达车辆的接收器,从而导致车辆位置信息的缺失与定位结果的严重偏移。为了解决北斗卫星信号在高遮挡环境下易中断的问题,5g辅助下的卫惯组合导航成为了现今车辆导航行业的紧迫需求。
2、卫惯组合导航是通过松耦合、紧耦合或深耦合的方式将惯导系统与卫导系统进行结合的一种导航方式,由惯导系统(inertialnavigationsystem,ins)进行定位解算,卫导系统进行误差修正,从而实现高精度定位。
3、目前卫惯组合导航技术大多采用基于模型的方法进行信息融合与位置解算。然而,传统的基于模型的方法需要准确的系统动力学模型和噪声统计信息,难以适应车辆行驶过程中复杂的环境变化。
技术实现思路
1、有鉴于此,为了解决现有定位方法中依赖于精确的建模以及准确的噪声估计,进而导致适用性不高的技术问题,本发明提出一种自适应智能调参的北斗惯导融合定位方法及系统,所述方法包括以下步骤:
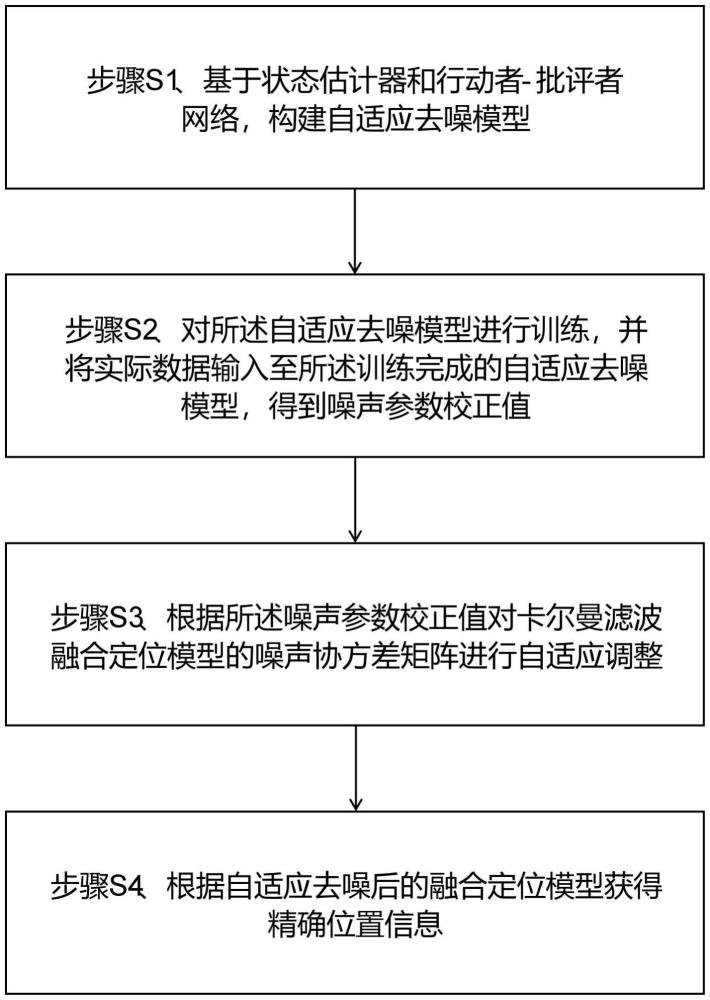
2、基于状态估计器和行动者-批评者网络,构建自适应去噪模型;
3、其中,状态估计器,用于从多输入的观测空间中获取信息,以形成策略的置信状态;行动者-批评者网络,其中,行动者网络用于从置信状态中为智能体选择合适的行动,批评者网络从不同的置信状态下判断估计值是否准确。
4、对所述自适应去噪模型进行训练,并将实际数据输入至所述训练完成的自适应去噪模型,得到噪声参数校正值;
5、根据所述噪声参数校正值对卡尔曼滤波融合定位模型的噪声协方差矩阵进行自适应调整;
6、根据自适应去噪后的融合定位模型获得精确位置信息。
7、在本实施例中,基于状态估计器和行动者-批评者网络,构建强化学习自适应卡尔曼滤波去噪模型。模型接收经过数据处理的卫星信号和惯导信号,并连同车辆历史序列作为观测输入,再根据训练时学习到的噪声参数校正策略输出卡尔曼滤波融合定位模型中的噪声协方差矩阵的校正值。随后,经自适应去噪后的融合定位模型融合卫导和惯导获得的位置信息,对惯导获得位置信息的误差值估计,并将估计得到的误差值补偿至该时刻惯导获得的位置信息,最终得到车辆的精确位置信息。
8、在一些实施例中,在基于状态估计器和行动者-批评者网络,构建自适应去噪模型这一步骤中:
9、构建强化学习环境,基于部分可观测马尔可夫决策过程对所述校正模型进行训练;
10、所述强化学习环境包括观测空间、动作空间和奖励函数;
11、所述观测空间包括车辆历史位置观测、卫星特征矩阵和imu特征观测;
12、所述状态估计器融合所述实际数据中的特征信息,估计置信状态;
13、所述行动者-批评者网络用于估计校正动作和预测不同置信状态下不同动作的估计值。
14、其中,卫星特征矩阵包括视距矢量和伪距残差;
15、其中,imu特征观测包括车辆在导航坐标系下的三坐标轴方向的速度分量;
16、在一些实施例中,在对所述自适应去噪模型进行训练,并将实际数据输入至所述训练完成的自适应去噪模型,得到噪声参数校正值这一步骤中:
17、初始化一个经验回放池,强化学习智能体持续与环境进行交互采集经验,直到经验池最大存储容量;
18、使用所述经验回放池中的经验对所述自适应去噪模型进行训练,得到训练完成的自适应去噪模型;
19、获取所述实际数据;
20、将所述实际数据输入至所述训练完成的自适应去噪模型,得到噪声参数校正值;
21、在一些实施例中,在根据所述噪声参数校正值对卡尔曼滤波融合定位模型的噪声协方差矩阵进行自适应调整这一步骤中,其具体包括:
22、获取所述噪声参数校正值;
23、基于卡尔曼滤波,构建北斗惯导融合定位模型;
24、根据所述校正值对卡尔曼滤波的过程噪声协方差矩阵和测量噪声协方差矩阵进行自适应调整;
25、更新所述基于卡尔曼滤波的北斗惯导融合定位模型中的状态方程和测量方程,得到噪声参数校正后的融合定位模型。
26、在一些实施例中,在根据自适应去噪后的融合定位模型获得精确位置信息这一步骤中,其具体包括:
27、根据所述噪声参数校正后的融合定位模型,估计惯导的位置误差值;
28、根据所述位置误差值,校正惯导获得的位置信息,得到车辆的精确位置信息。
29、在一些实施例中,还包括:采用具有自适应学习率的adam优化器。
30、本发明还提出了一种自适应智能调参的北斗惯导融合定位系统,所述系统包括:
31、去噪模型构建,基于状态估计器和行动者-批评者网络,构建自适应去噪模型;
32、参数学习模块,对所述自适应去噪模型进行训练,并将实际数据输入至所述训练完成的自适应去噪模型,得到噪声参数校正值;
33、参数调节模块,根据所述噪声参数校正值对卡尔曼滤波融合定位模型的噪声协方差矩阵进行自适应调整;
34、融合定位模块,根据自适应去噪后的融合定位模型获得精确位置信息。
35、基于上述方案,本发明提供了一种自适应智能调参的北斗惯导融合定位方法及系统,以深度强化学习为基础,构建了一种动态噪声抑制及参数学习的自适应去噪模型,用于学习无法建模的动态变化的噪声对组合导航定位的影响规律,对卡尔曼滤波器的过程噪声协方差和测量噪声协方差进行校正,实现对基于卡尔曼滤波的北斗惯导融合定位模型的动态噪声滤除。并且,本发明还在能表示时序性特点的历史位置序列数据和能表示当前环境信息的卫星特征数据的基础上还融合了imu特征的车辆运动趋势信息。
技术特征:
1.一种自适应智能调参的北斗惯导融合定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述一种自适应智能调参的北斗惯导融合定位方法,其特征在于,基于状态估计器和行动者-批评者网络,构建自适应去噪模型这一步骤,其具体包括:
3.根据权利要求2所述一种自适应智能调参的北斗惯导融合定位方法,其特征在于,对所述自适应去噪模型进行训练,并将实际数据输入至所述训练完成的自适应去噪模型,得到噪声参数校正值这一步骤,其具体包括:
4.根据权利要求3所述一种自适应智能调参的北斗惯导融合定位方法,其特征在于,根据所述噪声参数校正值对卡尔曼滤波融合定位模型的噪声协方差矩阵进行自适应调整这一步骤,其具体包括:
5.根据权利要求4所述一种自适应智能调参的北斗惯导融合定位方法,其特征在于,根据自适应去噪后的融合定位模型获得精确位置信息这一步骤,其具体包括:
6.根据权利要求5所述一种自适应智能调参的北斗惯导融合定位方法,其特征在于,还包括:
7.根据权利要求6所述一种自适应智能调参的北斗惯导融合定位方法,其特征在于,所述卫星特征矩阵包括视距矢量和伪距残差。
8.根据权利要求7所述一种自适应智能调参的北斗惯导融合定位方法,其特征在于,所述奖励函数的公式表示如下:
9.一种自适应智能调参的北斗惯导融合定位系统,其特征在于,包括:
技术总结
本发明公开了一种自适应智能调参的北斗惯导融合定位方法及系统,该方法包括:基于状态估计器和行动者‑批评者网络,构建自适应去噪模型;对所述自适应去噪模型进行训练,并将实际数据输入至所述训练完成的自适应去噪模型,得到噪声参数校正值;根据所述噪声参数校正值对卡尔曼滤波融合定位模型的噪声协方差矩阵进行自适应调整;根据自适应去噪后的融合定位模型获得精确位置信息。该系统包括:去噪模型构建、参数学习模块、参数调节模块和融合定位模块。通过使用本发明,能够有效去除融合定位中无法被建模的动态噪声和自适应调节参数,提高定位系统对复杂动态变化的城市环境的适应性。本发明可广泛应用于卫星导航领域。
技术研发人员:李珍妮,肖帆,元荣,谢胜利,余青松,谢侃,库金
受保护的技术使用者:广东工业大学
技术研发日:
技术公布日:2025/2/27
- 还没有人留言评论。精彩留言会获得点赞!