一种触觉传感器及其制作方法与流程
本发明涉及传感器,具体涉及一种触觉传感器及其制作方法。
背景技术:
1、随着人工智能技术的快速发展,与其相关的机器人、可穿戴产品都进入“人机交互”时代。电子皮肤作为一种触觉传感器,是机器人与外界进行接触的重要工具,触觉传感器不仅需要实现高灵敏的物体载荷检测,同时需要能够传递人为信息。
2、然而,目前大多单个传感器只能产生一种信号,无法满足人机交互的需求。传感器阵列可以产生不同的信号,但多个设备将面临信号串扰、功耗和体积增加等问题。因此,开发一种单个传感器输出多种信号的传感器单元,实现人机界面设备间的海量信息通信,实现整个系统的简化,对于高效、便捷的人机界面系统具有重要意义。
3、目前能产生可区分信号的单个触觉传感器根据传感机理可分为压阻式、压电式、电容式、摩擦式。然而,压阻式和电容式传感器均需要外部电源供电,造成传感器设备体积大,无法高效集成。相比之下,摩擦式和压电式传感器是自供电的,但是摩擦式传感器受外部环境影响大,导致输出不稳定。并且压电式传感器多为含铅的有毒材料,不宜在触觉传感器上使用。
技术实现思路
1、本发明的目的在于克服上述技术不足,提出一种触觉传感器及其制作方法,解决现有技术中各种传感器要么不能产生可区分信号,要么不适合作为触觉传感器的技术问题。
2、为达到上述技术目的,本发明采取了以下技术方案:
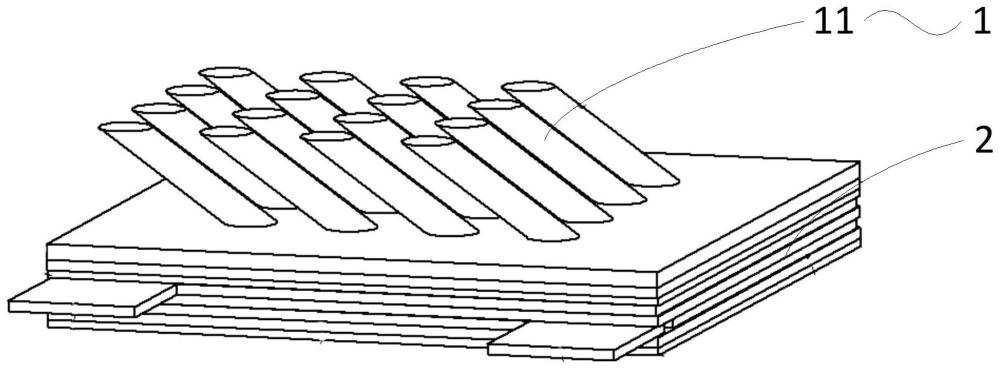
3、第一方面,本发明提供了一种触觉传感器,包括:线圈单元,线圈单元具有若干线圈;磁柱单元,磁柱单元具有多个磁柱,磁柱朝同一方向倾斜布置,磁柱的下端与线圈单元的上表面固定连接,磁柱弯曲时会在线圈内产生感应电动势。
4、在一些实施例中,多个磁柱呈矩阵排列。
5、在一些实施例中,磁柱单元还包括底座,磁柱下端与底座固定连接,底座与线圈单元的上表面固定连接。
6、在一些实施例中,磁柱倾斜角度为30°-40°。
7、在一些实施例中,线圈单元具有两个线圈,线圈呈螺旋排布并且旋向相反。
8、在一些实施例中,线圈单元包括从下至上依次叠摞布置的基底层、聚酰亚胺封装层、第一线圈、绝缘层、第二线圈以及聚合物应力层,磁柱单元与聚合物应力层固定连接。
9、在一些实施例中,底座和基底层均为硅胶材质。
10、第二方面,本发明还提供了一种触觉传感器的制作方法,包括如下步骤:
11、s1、分别制备线圈单元和磁柱单元;
12、s2、将磁柱单元粘黏固定在线圈单元的上表面。
13、在一些实施例中,制备磁柱单元的方法为:
14、s111、制备若干磁柱;
15、s112、将磁柱放置于磁柱单元模具内,将硅胶添加到磁柱单元模具内,硅胶固化后形成磁柱单元的底座;
16、s113、对磁柱充磁,使得磁柱的磁极方向与其轴线的夹角为15°-55°。
17、在一些实施例中,磁柱的制作方法为:将钕铁硼磁粉和硅胶倒入烧杯中,以500rpm/min的转速搅拌3min,得到钕铁硼磁粉和硅胶的混合物,然后将混合物注入磁柱模具内,在室温条件下固化4小时。
18、与现有技术相比,本发明提供的触觉传感器具有倾斜布置的磁柱,在倾斜磁柱弯曲过程中,磁场的空间分布将发生变化,经过线圈的磁通量会发生变化,传感器将产生变化的感应电动势,通过磁柱向上或向下弯曲偏转,就能够产生两个可区分的信号;不仅具有高灵敏度和低检测限,同时由于不需要外部供电,能够实现小型化,广泛应用于各种触觉检测和非接触应用中。
技术特征:
1.一种触觉传感器,其特征在于,包括:
2.根据权利要求1所述的触觉传感器,其特征在于,多个所述磁柱呈矩阵排列。
3.根据权利要求1所述的触觉传感器,其特征在于,所述磁柱单元还包括底座,所述磁柱下端与所述底座固定连接,所述底座与所述线圈单元的上表面固定连接。
4.根据权利要求1所述的触觉传感器,其特征在于,所述磁柱倾斜角度为30°-40°。
5.根据权利要求3所述的触觉传感器,其特征在于,所述线圈单元具有两个所述线圈,所述线圈呈螺旋排布并且旋向相反。
6.根据权利要求5所述的触觉传感器,其特征在于,所述线圈单元包括从下至上依次叠摞布置的基底层、聚酰亚胺封装层、第一线圈、绝缘层、第二线圈以及聚合物应力层,所述磁柱单元与所述聚合物应力层固定连接。
7.根据权利要求6所述的触觉传感器,其特征在于,所述底座和所述基底层均为硅胶材质。
8.一种权利要求1-7中任意一项所述的触觉传感器的制作方法,其特征在于,包括如下步骤:
9.根据权利要求8所述的触觉传感器的制作方法,其特征在于,制备所述磁柱单元的方法为:
10.根据权利要求9所述的触觉传感器的制作方法,其特征在于,所述磁柱的制作方法为:将钕铁硼磁粉和硅胶倒入烧杯中,以500rpm/min的转速搅拌3min,得到钕铁硼磁粉和硅胶的混合物,然后将混合物注入磁柱模具内,在室温条件下固化4小时。
技术总结
本发明公开了一种触觉传感器及其制作方法,触觉传感器包括:线圈单元和磁柱单元,线圈单元具有若干线圈;磁柱单元具有多个磁柱,磁柱朝同一方向倾斜布置,磁柱的下端与线圈单元的上表面固定连接,磁柱弯曲时会在线圈内产生感应电动势。制作方法,包括如下步骤:S1、分别制备线圈单元和磁柱单元;S2、将磁柱单元粘黏固定在线圈单元的上表面。与现有技术相比,本发明提供的触觉传感器具有倾斜布置的磁柱,在倾斜磁柱弯曲过程中,磁场的空间分布将发生变化,经过线圈的磁通量会发生变化,传感器将产生变化的感应电动势,通过磁柱向上或向下弯曲偏转,就能够产生两个可区分的信号,具有高灵敏度和低检测限。
技术研发人员:黄立,刘建军,汪超,蒋文杰,毛添华,陈绪文,王春水
受保护的技术使用者:武汉真友科技有限公司
技术研发日:
技术公布日:2025/3/20
- 还没有人留言评论。精彩留言会获得点赞!