光学测距装置及移动装置的制作方法
本申请属于光学测距装置,更具体地说,是涉及一种光学测距装置及移动装置。
背景技术:
1、激光雷达是一种常见的光学测距装置。其工作原理是向目标发射探测信号,然后将接收到的从目标反射回来的信号与发射信号进行比较,作适当处理后,就可获得目标的有关信息,如目标距离、方位、高度、速度、姿态、甚至形状等参数。旋转式激光雷达主要由扫描测距模组、驱动模组、外壳总成、编码模组组成,这些结构均在激光雷达的高度方向和宽度方向上占据一定的空间。
2、目前,应用有旋转式激光雷达的终端产品,例如清洁机器人等,对旋转式激光雷达的小型化提出了更高的要求。
技术实现思路
1、本申请实施例的目的在于提供一种光学测距装置及移动装置,旨在解决现有技术中的光学测距装置的旋转中壳径向尺寸较大的技术问题。
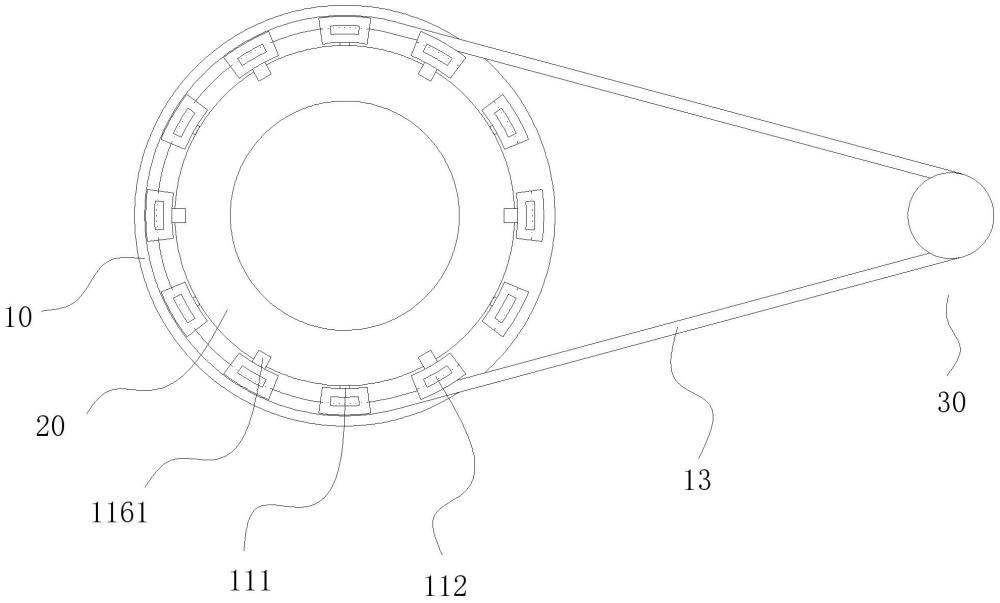
2、为实现上述目的,根据本申请的一个方面,提供了一种光学测距装置,光学测距装置包括:壳体部、轴承部及驱动部,其中,壳体部包括底座及旋转中壳,旋转中壳上设置多个沿旋转中壳的周向间隔设置的集成凸起;轴承部的内圈安装于底座,旋转中壳通过多个集成凸起的内侧壁与轴承部的外圈的配合安装于轴承部;驱动部安装于底座,多个集成凸起的外侧壁设置有传动结构,驱动部能够通过传动结构对旋转中壳进行驱动,使旋转中壳相对于底座进行旋转。
3、可选地,多个集成凸起的外侧壁上均设置有传动凹槽,传动结构包括多个传动凹槽和传动带,传动带设置于多个传动凹槽内,驱动部通过传动带驱动旋转中壳相对于底座进行旋转;或,多个集成凸起的外侧壁上均设置有第一传动齿,传动结构包括多个第一传动齿和主动齿轮,主动齿轮与多个第一传动齿传动配合,驱动部通过主动齿轮驱动旋转中壳相对于底座进行旋转;或,多个集成凸起的外侧壁上均设置有第二传动齿,传动结构包括多个第二传动齿和传动链,传动链与多个第二传动齿传动配合,驱动部通过传动链驱动旋转中壳相对于底座进行旋转。
4、可选地,多个集成凸起中的至少部分集成凸起的内侧壁上设置有第一卡扣结构,第一卡扣结构与轴承部的外圈抵接配合,以限制轴承部在第一方向上的轴向移动。
5、可选地,多个集成凸起中的至少部分集成凸起的内侧壁上设置有径向限位结构,径向限位结构与轴承部的外圈的外侧壁抵接配合;或,未设置有第一卡扣结构的集成凸起的内侧壁上设置有径向限位结构,径向限位结构与轴承部的外圈的外侧壁抵接配合。
6、可选地,所述集成凸起包括传动段及限位段,传动段与限位段在轴承部的轴向上依次设置,传动结构设置于传动段,第一卡扣结构设置于限位段,传动段在轴承部的径向上的厚度,大于限位段在轴承部的径向上的厚度。
7、可选地,旋转中壳上形成有第一限位结构,第一限位结构与轴承部的外圈抵接配合,以限制轴承部在第二方向上的轴向移动;其中,第一方向和第二方向互为反方向。
8、可选地,底座上设置有第二卡扣结构,第二卡扣结构至少部分穿设在轴承部的内圈内,并与轴承部的内圈抵接配合,以限制轴承部在第二方向上的轴向移动;底座上还设置有第二限位结构,第二限位结构与轴承部的内圈抵接配合,以限制轴承部在第一方向上的轴向移动;其中,第一方向和第二方向互为反方向。
9、可选地,光学测距装置还包括编码盘组件;编码盘组件包括多个第一编码结构;多个集成凸起中的至少部分集成凸起上设置有至少一个第一编码结构,第一编码结构与对应的集成凸起之间一体成型或分体固定;或,编码盘组件包括盘体和多个第二编码结构;多个第二编码结构周向间隔地设置在盘体上,盘体以一体成型或分体固定的方式安装于多个集成凸起中的至少部分集成凸起,多个第二编码结构周向间隔地设置在盘体的远离集成凸起的一侧。
10、可选地,多个集成凸起中的至少部分集成凸起上设置有横向限位结构,横向限位结构能够与编码盘组件的内侧壁和/或外侧壁抵接配合,以限制编码盘组件在轴承部的径向方向上的移动;和/或,多个集成凸起中的至少部分集成凸起上设置有第一周向限位结构,第一周向限位结构能够与编码盘组件配合,以限制编码盘组件在轴承部的周向方向上的旋转。
11、根据本申请的另一个方面,提供了一种移动装置,移动装置包括光学测距装置,光学测距装置为上述的光学测距装置。
12、本申请提供的光学测距装置的有益效果在于:与现有技术相比,本申请所提供的光学测距装置通过将多个集成凸起沿旋转中壳的周向间隔设置,使轴承部的外圈能够通过与多个集成凸起的内侧壁进行配合的方式进行安装,通过在多个集成凸起的外侧壁设置传动结构,使驱动部能够通过传动结构驱动旋转中壳相对于底座进行旋转,省去了轴承部外圈的安装结构与传动结构之间除了集成凸起以外的所有实体或间隙所占用的径向空间,减小了光学测距装置的径向尺寸,并且通过多个沿旋转中壳的周向间隔设置的集成凸起对轴承部的外圈进行安装,能够降低轴承部外圈安装结构在光学测距装置中的占用空间及重量,实现了光学测距装置的轻量化。
技术特征:
1.一种光学测距装置,其特征在于,包括:
2.根据权利要求1所述的光学测距装置,其特征在于,多个所述集成凸起(11)的外侧壁上均设置有传动凹槽(1151),所述传动结构包括多个所述传动凹槽(1151)和传动带(13),所述传动带(13)设置于多个所述传动凹槽内,所述驱动部(30)通过所述传动带(13)驱动所述旋转中壳(10)相对于所述底座进行旋转;
3.根据权利要求1所述的光学测距装置,其特征在于,多个所述集成凸起(11)中的至少部分所述集成凸起(11)的内侧壁上设置有第一卡扣结构(1161),所述第一卡扣结构(1161)与所述轴承部(20)的外圈抵接配合,以限制所述轴承部(20)在第一方向上的轴向移动。
4.根据权利要求3所述的光学测距装置,其特征在于,多个所述集成凸起(11)中的至少部分所述集成凸起(11)的内侧壁上设置有径向限位结构(111),所述径向限位结构(111)与所述轴承部(20)的外圈的外侧壁抵接配合;
5.根据权利要求3所述的光学测距装置,其特征在于,所述集成凸起(11)包括传动段(115)及限位段(116),所述传动段(115)与所述限位段(116)在所述轴承部(20)的轴向上依次设置,所述传动结构设置于所述传动段(115),所述第一卡扣结构(1161)设置于所述限位段(116),所述传动段(115)在所述轴承部(20)的径向上的厚度,大于所述限位段(116)在所述轴承部(20)的径向上的厚度。
6.根据权利要求3所述的光学测距装置,其特征在于,所述旋转中壳(10)上形成有第一限位结构(12),所述第一限位结构(12)与所述轴承部(20)的外圈抵接配合,以限制所述轴承部(20)在第二方向上的轴向移动;其中,所述第一方向和所述第二方向互为反方向。
7.根据权利要求1所述的光学测距装置,其特征在于,所述底座上设置有第二卡扣结构,所述第二卡扣结构至少部分穿设在所述轴承部(20)的内圈内,并与所述轴承部(20)的内圈抵接配合,以限制所述轴承部(20)在第二方向上的轴向移动;所述底座上还设置有第二限位结构,所述第二限位结构与所述轴承部(20)的内圈抵接配合,以限制所述轴承部(20)在第一方向上的轴向移动;其中,所述第一方向和所述第二方向互为反方向。
8.根据权利要求1至7中任意一项所述的光学测距装置,其特征在于,所述光学测距装置还包括编码盘组件(40);
9.根据权利要求8所述的光学测距装置,其特征在于,多个所述集成凸起(11)中的至少部分所述集成凸起(11)上设置有横向限位结构(113),所述横向限位结构(113)能够与所述编码盘组件(40)的内侧壁和/或外侧壁抵接配合,以限制所述编码盘组件(40)在所述轴承部(20)的径向方向上的移动;
10.一种移动装置,其特征在于,所述移动装置包括光学测距装置,所述光学测距装置为权利要求1至9中任意一项所述的光学测距装置。
技术总结
本申请适用于光学测距装置技术领域,提供了一种光学测距装置及移动装置,光学测距装置包括:壳体部、轴承部及驱动部,其中,壳体部包括底座及旋转中壳,旋转中壳上设置多个沿旋转中壳的周向间隔设置的集成凸起;轴承部的内圈安装于底座,旋转中壳通过多个集成凸起的内侧壁与轴承部的外圈的配合安装于轴承部;驱动部安装于底座,多个集成凸起的外侧壁设置有传动结构,驱动部能够通过传动结构对旋转中壳进行驱动,使旋转中壳相对于底座进行旋转。本申请所提供的光学测距装置省去了轴承部外圈的安装结构与传动结构之间除了集成凸起外的所有实体或间隙所占用的径向空间,减小了光学测距装置的径向尺寸。
技术研发人员:罗富文,郭盖华,周伟
受保护的技术使用者:深圳乐动机器人股份有限公司
技术研发日:
技术公布日:2025/1/13
- 还没有人留言评论。精彩留言会获得点赞!