一种基于激光技术实现智能毫米级高程测量的方法与流程
本发明属于激光测量仪器,尤其涉及一种基于激光技术实现毫米级高程测量的机器人系统。
背景技术:
1、高程测量是一种测量地球表面或物体相对于某一参考面的高度的过程。在土地测量、工程建设等领域中,高程测量非常重要,它提供了地表或物体在垂直方向上的位置信息,例如在道路施工工程中,施工人员需要对道路的高程进行测量,并根据测量结果对道路施工进行调整,以确保道路高程满足设计要求,并将施工误差控制在最小范围内,而当前各类建造和施工领域要实现毫米级的高精度高程测量方式只能依赖专业的人员通过水准仪或全站仪进行人工作业,人力成本高且效率低下。
技术实现思路
1、为了解决现有技术存在的不足,本发明提供了一种基于激光技术实现毫米级高程测量的机器人系统,该系统通过智能导航机器人、线束型激光光源、激光接收基准杆及aiot平台的协同配合,实现工程施工中毫米级精度的高程无人化测量,有效提升了施工现场的测量效率,减少了专业测量人员需求,测量结果记录更加准确。
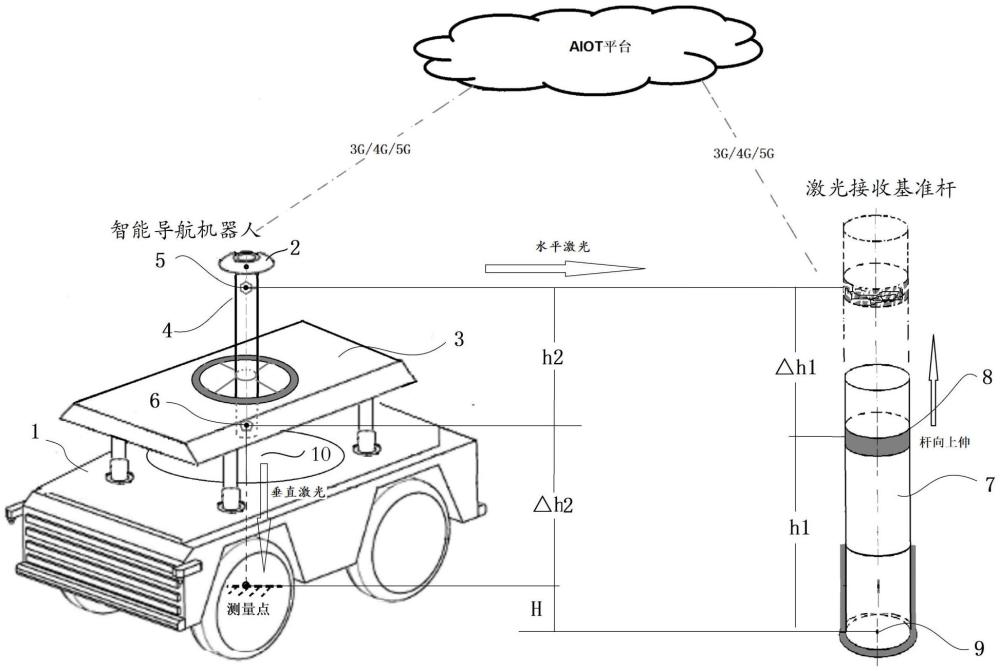
2、为了实现上述目的,本发明的一个实施方式的一种基于激光技术实现毫米级高程测量的机器人系统,包括配置有激光发射装置的智能导航机器人、用于接收激光的激光接收基准杆及分别与所述智能导航机器人和所述激光接收基准杆通信连接的aiot平台;
3、激光发射装置包括同源调控台及固定安装在同源调控台上的圆柱形光源安装杆,发射线束型激光的激光发射器固设在光源安装杆上部,激光测距传感器固设在光源安装杆底部,光源安装杆的上部和底部分别伸出同源调控台中水平平台的上表面和下表面,激光发射器发射的线束型激光的方向与光源安装杆杆体呈现90度夹角,激光测距传感器发射的激光方向为沿光源安装杆杆体轴线向下照射;
4、所述同源调控台固设在智能导航机器人的线控车身底盘上,所述同源调控台用于实现激光发射器发射的线束型激光保持水平状态、激光测距传感器发射的线束型激光保持垂直状态及所述激光发射器发射的水平状态线束型激光旋转调整照射的方向;光源安装杆上还设置有rtk模块,rtk模块坐标位置、激光发射器发射点位置、激光测距传感器光源发射点位置均设置在光源安装杆的轴线上;
5、所述激光接收基准杆包括可升降式立杆及套设在可升降式立杆上的环形激光接收传感器。
6、进一步地,所述智能导航机器人还包括蓄电池、主控制器、第一物联网模块,所述线控车身底盘为智能导航机器人的物理平台,用于承载包括所述蓄电池、所述主控制器、所述第一物联网模块及所述rtk模块各种组件,并通过驱动四车轮进行移动。
7、进一步地,所述同源调控台包括4根高度相等的补偿伸缩杆、水平平台及水平旋转转盘;每根补偿伸缩杆的底部固设在线控车身底盘上,顶部通过球接头与水平平台下表面转动连接,水平平台上表面固设水平旋转转盘,水平旋转转盘圆心位置固定、垂直设置所述光源安装杆。
8、进一步地,所述线控车身底盘上预留有空洞,所述空洞位于4根补偿伸缩杆底部之间,空洞尺寸设置标准为激光测距传感器发射的垂直线束型激光在机器人车辆发生或不发生倾斜时,都能够穿过空洞照射到地面。
9、进一步地,所述激光接收基准杆还包括设置在可升降式立杆上的杆控制器、第二物联网模块及电源;所述可升降式立杆包括基座和设置于基座上的移动杆,移动杆能够根据控制指令上下伸缩调节,调节精度<1毫米。
10、进一步地,所述aiot平台包含iot管理模块、任务协同服务模块及数据中台模块,部署于云服务器。
11、进一步地,所述环形激光接收传感器的环型接收面的宽度≤10毫米。
12、进一步地,激光发射器为线束型激光光源,激光光源标准为光线传输至激光接收基准杆后,光斑大小≤10毫米。
13、进一步地,所述可升降式立杆基座内设置与移动杆伸缩进行联动的齿轮,并通过计数器计算齿轮旋转齿数确定移动杆伸缩高度,即激光接收传感器移动的距离。
14、进一步地,所述环形激光接收传感器套设区域形成的圆柱体轴线中心位置固定设置增量式编码器,所述增量式编码器用于提供相对于初始位置的变化量,指示其移动的距离,即激光接收传感器移动的距离。
15、本发明的有益效果为:
16、1、本发明通过智能导航机器人、激光发射装置、激光接收基准杆与aiot平台的配合,改变了人工寻找测量点、人工测量数据、记录数据的工作模式,只需提前架设激光接收基准杆,然后输入各测量点的信息到aiot平台,即可通过智能导航机器人的自主导航系统导航到各测量点并自动完成高程测量和数据记录,且测量高程精度可以控制在毫米级,实现了测量作业的自动化和数字化;
17、2、本发明通过将激光发射器移动到测量点经纬度上(高度不同),激光发射器发射水平线束型激光,激光接收基准杆上的激光接收传感器接收到水平线束型激光后,确定激光接收传感器高程后反推激光发射器高程,再通过激光发射器与激光测距传感器的距离关系及激光测距传感器测出的其到地面测量点的距离,最后由aiot平台计算得到目标地面测量点的高程,高程精度可以控制在毫米级;
18、3、本发明构建了适用于本发明具体需求情景的特殊设计的同源调控台,同源调控台中同源设计了4根补偿伸缩杆,通过同源的设计提供了更好的高度升降的补偿效果;并且,水平平台通过其水平旋转转盘中心上固定的光源安装杆分别设置两个激光光源,一个用来发射水平方向的激光,用来得到参照高程数据;另一个发射垂直方向的激光测距,并在同源调控台下的智能导航机器人线控车身底盘上配合预留照射到地面的空洞,用来得到自身所需高程数据,结构巧妙,获得高程数据准确快捷;
19、4、本发明发射水平方向的激光的激光发射器发射的是线束型激光,激光接收基准杆上设置的是圆环形激光接收传感器,线束型激光能够大幅提高测量中的施工安全;而圆环形的激光接收传感器的设计,能够使激光接收传感器在其设置处360度、无死角地接收激光信号,扩大激光接收基准杆的测量范围。
技术特征:
1.一种基于激光技术实现智能毫米级高程测量的方法,其特征在于,其通过毫米级高程测量的机器人系统实现,包括以下步骤:
2.根据权利要求1所述的基于激光技术实现智能毫米级高程测量的方法,其特征在于,所述步骤s1、进行机器人系统初始化,具体为:
3.根据权利要求2所述的基于激光技术实现智能毫米级高程测量的方法,其特征在于,所述步骤s112中,布设激光接收基准杆时,调整移动杆处于未伸出的初始状态,即令环形激光接收传感器内部轴线上的增量式编码器的坐标高度为其高度最低点。
4.根据权利要求2所述的基于激光技术实现智能毫米级高程测量的方法,其特征在于,所述步骤s13中,进行激光发射装置初始化时,水平平台下的4根补偿伸缩杆的伸缩高度为伸出约1/2,用于在机器人到达测量点时,无论车四轮所处地面高低,同源设计的4根补偿伸缩杆能更快捷补偿伸缩,达到水平平台水平状态目标。
5.根据权利要求1所述的基于激光技术实现智能毫米级高程测量的方法,其特征在于,所述方法中,智能导航机器人发射激光前,rtk模块经纬度坐标、激光发射器发射点经纬度坐标、激光测距传感器发射点经纬度坐标与测量点经纬度坐标一致。
6.根据权利要求1所述的基于激光技术实现智能毫米级高程测量的方法,其特征在于,所述方法还包括:在激光发射器的水平激光发射前,做现场安全提醒及去掉遮挡障碍物体,确保机器人与基准杆两点之间直线区域内无人员安全隐患或遮挡物存在。
7.根据权利要求1所述的基于激光技术实现智能毫米级高程测量的方法,其特征在于,所述方法还包括:在后续测量第二测量点的高程时,基准杆的移动方向由rtk终端前后的高度坐标z1和z2的关系确定:
8.根据权利要求1所述的基于激光技术实现智能毫米级高程测量的方法,其特征在于,所述方法还包括:当某些组件出现故障或信号问题,在智能导航机器人发出水平激光标定时间内无法发射、接收、反馈测量数据时,智能导航机器人向aiot平台报送系统问题故障,标定时间为激光接收基准杆正常状态下从最低点伸至最高点时长的2倍。
9.根据权利要求1所述的基于激光技术实现智能毫米级高程测量的方法,其特征在于,所述毫米级高程测量的机器人系统包括配置有激光发射装置的智能导航机器人、用于接收激光的激光接收基准杆及分别与所述智能导航机器人和所述激光接收基准杆通信连接的aiot平台。
10.根据权利要求9所述的基于激光技术实现智能毫米级高程测量的方法,其特征在于,所述激光发射装置包括同源调控台及固定安装在同源调控台上的圆柱形光源安装杆,发射线束型激光的激光发射器固设在光源安装杆上部,激光测距传感器固设在光源安装杆底部,光源安装杆的上部和底部分别伸出同源调控台中水平平台的上表面和下表面,激光发射器发射的线束型激光的方向与光源安装杆杆体呈现90度夹角,激光测距传感器发射的激光方向为沿光源安装杆杆体轴线向下照射;
技术总结
本发明公开了一种基于激光技术实现智能毫米级高程测量的方法,包括:智能导航机器人根据测量任务导航到测量点、调整水平平台至水平状态,并使RTK模块的二维坐标等于测量点二维坐标;智能导航机器人通过水平转盘带动光源安装杆旋转,使激光发射器寻找并对准激光接收基准杆轴线投射水平激光;AIOT平台通知基准杆移动接收激光,并记录增量式编码器输出的移动距离值上传AIOT平台;打开激光测距传感器发射垂直激光到测量点,输出测得的距离上传AIOT平台;AIOT平台通过表达式计算智能导航机器人所在测量点的毫米级高程。本发明能够实现毫米级的高程测量及测量作业的自动化和数字化。
技术研发人员:戴志平,肖晓帆,王碧波
受保护的技术使用者:中远海运(广州)有限公司
技术研发日:
技术公布日:2025/2/24
- 还没有人留言评论。精彩留言会获得点赞!