一种全方位高精度三维测量系统及方法
本发明属于三维成像系统的,尤其涉及一种全方位高精度三维测量系统,以及一种全方位高精度三维测量方法。
背景技术:
1、三维测量技术在工业制造、文化遗产保护、建筑测量等领域得到了广泛应用。但现有的三维测量系统通常依赖固定的单一视角进行数据采集,导致测量过程中视角受限,难以实现对目标物体的全方位测量。同时,在多视角拼接过程中,由于不同视角下数据对齐误差较大,常常会影响测量的整体精度,尤其是在目标物体结构复杂或表面特性多变的情况下,拼接误差的问题尤为突出。虽然部分研究提出了通过使用多个相机从不同方向同时采集数据的方法,但这种方式存在硬件成本高、系统复杂度高等问题,且难以在一些需要灵活移动和高精度测量的场景中推广应用。
2、此外,现有技术中的三维测量系统在对数据拼接时,多采用局部配准方法,容易受局部数据精度影响,导致整体数据重建不一致性问题。而在全方位三维测量中,随着测量范围的增加,局部误差积累会进一步放大,导致较大的拼接误差,无法满足高精度应用的需求。
3、因此,现有的三维测量系统在实现高精度全方位测量的过程中仍然存在较多技术瓶颈,如何有效提高三维测量系统的精度、降低多视角拼接误差、并简化系统架构,成为亟待解决的技术难题。
技术实现思路
1、为克服现有技术的缺陷,本发明要解决的技术问题是提供了一种全方位高精度三维测量系统,其能够克服现有固定视角测量的局限性,实现目标物体的全方位测量,适用于各种复杂形状物体的高精度三维重建,可以显著降低多视角数据的误差积累,提升三维测量结果的整体精度,结构灵活,操作简便,能够根据测量需求调整相机位置和角度,保证测量过程的稳定性和一致性,适用于多种测量环境和应用场景。
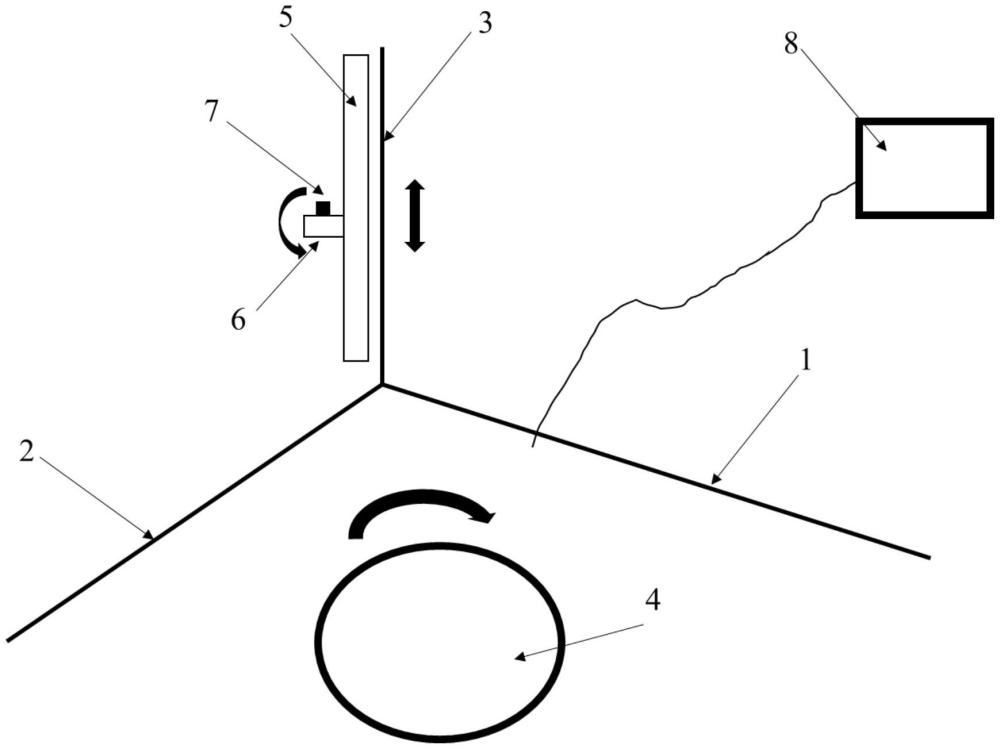
2、本发明的技术方案是:这种全方位高精度三维测量系统,其包括:三自由度运动平台、三维相机(7)、标定板、上位机(8);
3、三自由度运动平台包括:x方向桁架(1)、y方向桁架(2)、z方向桁架(3)、转台(4)、升降导轨(5)、俯仰云台(6),待测量目标放置在转台上,三维相机放置在俯仰云台上,俯仰云台安装在升降导轨上,运动平台在多拍摄视角下对待测量目标进行数据采集;
4、上位机控制转台带动待测量目标进行旋转运动,升降导轨和俯仰云台带动三维相机进行升降、俯仰运动;
5、三维测量过程中,上位机根据测量策略控制三维相机选取最优测量视角对待测量目标进行测量,并对测量效果较差的结果进行重复测量,补全测量结果;
6、三维测量系统标定过程中,将标定板放置在转台上,分别对三维相机的横向误差、反射率误差以及距离误差进行标定,消除三维测量系统的测量误差。
7、与现有技术相比,本发明的有益效果如下:
8、1.全方位测量:通过三自由度运动平台的设计,能够实现目标物体的全方位测量。转台、升降导轨及俯仰云台的组合使用,使得三维相机可以从多个视角采集数据,克服了现有固定视角测量的局限性,适用于各种复杂形状物体的高精度三维重建。
9、2.高精度拼接:采用全局一致性算法进行逐帧配准优化,通过对三维成像过程的标定,消除不同视角数据拼接时的误差。相比于传统的局部配准方法,可以显著降低多视角数据的误差积累,提升了三维测量结果的整体精度。
10、3.灵活性与稳定性:系统采用的三自由度运动平台结构灵活,操作简便,能够根据测量需求调整相机位置和角度。同时,通过标定和优化算法的结合,保证了测量过程的稳定性和一致性,适用于多种测量环境和应用场景。
11、还提供了这种全方位高精度三维测量系统的工作方法,其包括以下步骤:
12、(1)对三维测量系统进行标定,消除横向误差和反射率误差;
13、(2)在点云逐帧配准阶段,采用一致性优化的方法消除拼接过程中的累积误差。
技术特征:
1.一种全方位高精度三维测量系统,其特征在于:其包括:三自由度运动平台、三维相机(7)、标定板、上位机(8);
2.根据权利要求1所述的全方位高精度三维测量系统,其特征在于:所述标定板包括:圆形板、反射率板;圆形标定板表面有m×n个圆形凸起;反射率标定板表面均布i×i个圆形凸起,从左至右反射率依次降低。
3.根据权利要求1所述的全方位高精度三维测量系统的工作方法,其特征在于:该工作方法包括以下步骤:
4.根据权利要求3所述的全方位高精度三维测量系统的工作方法,其特征在于:所述步骤(1)包括以下分步骤:
5.根据权利要求4所述的全方位高精度三维测量系统的工作方法,其特征在于:所述步骤(2)包括以下分步骤:
技术总结
一种全方位高精度三维测量系统及方法,能够实现目标物体的全方位测量,适用于各种复杂形状物体的高精度三维重建。待测量目标放置在转台上,三维相机放置在俯仰云台上,俯仰云台安装在升降导轨上,运动平台在多拍摄视角下对待测量目标进行数据采集;上位机控制转台带动待测量目标进行旋转运动,升降导轨和俯仰云台带动三维相机进行升降、俯仰运动;测量过程中,上位机根据测量策略控制三维相机选取最优测量视角对待测量目标进行测量,对测量效果较差的结果重复测量,补全测量结果;标定过程中,将标定板放置在转台上,分别对三维相机的横向误差、反射率误差、距离误差标定,消除测量误差。
技术研发人员:齐德波,李洪强,莫亚强
受保护的技术使用者:扬州工业职业技术学院
技术研发日:
技术公布日:2025/2/5
- 还没有人留言评论。精彩留言会获得点赞!