本发明属于轨道检测,具体涉及一种道岔框架尺寸检测方法。
背景技术:
1、轨道几何尺寸是衡量铁路线路质量和运行安全的重要指标,直接关系到列车运行的平稳性、舒适性以及行车安全性,因此对于轨道几何尺寸的检测有着较高的要求。轨道几何尺寸的检测中也包含对道岔的多种几何尺寸的检测。
2、道岔是使列车从一股道转入另一股道的线路连接设备,也是轨道的薄弱环节之一,通常在车站、编组站大量铺设。在道岔区域有多种轨道部件,其中道岔框架是道岔的主要承重部件,其固定在轨道上,负责支撑道岔所有的部件,道岔框架需要具备足够的刚性、强度、良好的几何形态,以防在列车经过道岔时因受力而产生形变或损坏,保障道岔具有良好的运行性能,因此,道岔框架的尺寸检测非常重要。道岔框架尺寸(框架宽度)具体是指尖轨各检测面左侧基本轨作用边到右侧基本轨作用边的距离,也即两基本轨内侧间距。对于道岔框架的尺寸检测,在普速轨道取尖轨0、5、20、50、70mm断面宽这五个断面位置进行测量;在高速轨道按尖轨尖端到尖轨末端所在的枕位置进行测量。目前,主要是采用人工检测方式,检测人员分别前往上述各检测位置,并使用轨距尺根据要求进行测量,并人工记录下包括检测值、轨号、顺序等多种信息。人工检测方式耗时很长,检测效率低,并且检测精度受人为操作影响大。另一方面,当直尖轨与基本轨贴合时,人工测量方式误差较大。
技术实现思路
1、本发明是为解决上述问题而进行的,目的在于提供一种能够自动获取道岔框架尺寸、且检测精度高的检测方法,本发明采用了如下技术方案:
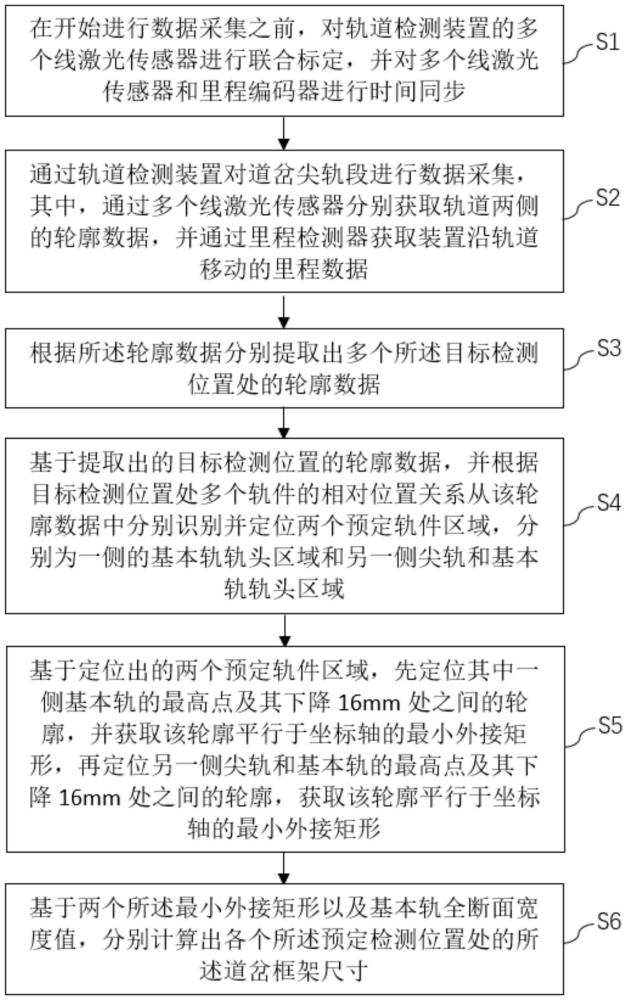
2、本发明提供了一种道岔框架尺寸检测方法,该方法具有这样的技术特征,基于多个线激光传感器采集的道岔尖轨段的轮廓数据以及里程检测器采集的里程数据计算多个预定的目标检测位置处的道岔框架尺寸,该方法包括以下步骤:轨件轮廓获取步骤,根据所述轮廓数据分别提取出多个所述目标检测位置处的轮廓数据;轨件区域定位步骤,基于提取出的所述目标检测位置的轮廓数据,并根据所述目标检测位置处多个轨件的相对位置关系从该轮廓数据中分别识别并定位两个预定轨件区域,分别为一侧的基本轨轨头区域和另一侧尖轨和基本轨轨头区域;轨头轮廓外接矩形获取步骤,基于定位出的两个所述预定轨件区域,分别定位两个所述预定轨件区域中基本轨的最高点及其下降预定距离处之间的轮廓,并获取该轮廓的最小外接矩形;框架尺寸计算步骤,基于两个所述最小外接矩形以及基本轨全断面宽度值,分别计算出各个所述预定检测位置处的所述道岔框架尺寸。
3、本发明提供的道岔框架尺寸检测方法,还可以具有这样的技术特征,其中,所述轨件区域定位步骤包括以下子步骤:对各所述目标检测位置的轮廓数据,将多个所述线激光传感器采集的tuple点位数据分别转换成相应的轮廓;根据预定高度范围从各个所述轮廓中筛选出轨件轨头区域的轮廓;根据多个所述线激光传感器的标定参数,将多个所述线激光传感器对应的所述轨件轨头区域的轮廓进行合并,得到合并轮廓;将所述合并轮廓绘制在图像中,并对所述图像中的目标进行形态学闭运算,对所述闭运算的结果进行连通区域分析,并结合所述预定轨件区域预定的宽度特征及其相对位置关系定位出两个所述预定轨件区域。
4、本发明提供的道岔框架尺寸检测方法,还可以具有这样的技术特征,其中,所述框架尺寸计算步骤包括以下子步骤:对两个所述预定轨件区域,分别提取其中基本轨的最高点及其下方预定间距处之间的轮廓,并获取该轮廓平行于坐标轴的最小外接矩形;对于两个所述最小外接矩形,计算宽度小的所述最小外接矩形内侧到宽度大的所述最小外接矩形的外侧的距离;将所述距离减去预定的基本轨全断面宽度,从而得到所述道岔框架尺寸。
5、本发明提供的道岔框架尺寸检测方法,还可以具有这样的技术特征,其中,在所述框架尺寸计算步骤中,对两个所述预定轨件区域,分别提取其中基本轨的最高点及其下方16mm处之间的轮廓,并获取该轮廓的最小外接矩形,所述基本轨全断面宽度为71mm。
6、本发明提供的道岔框架尺寸检测方法,还可以具有这样的技术特征,其中,对于两个所述外接矩形,根据两者的宽度以及相对位置判断哪一侧是宽度小的所述外接矩形的内侧以及宽度大的所述外接矩形的外侧,并根据判断结果取相应侧的角点坐标,再基于两个所述角点坐标计算出所述距离。
7、本发明提供的道岔框架尺寸检测方法,还可以具有这样的技术特征,其中,所述定位提取步骤包括以下子步骤:基于所述轮廓数据以及尖轨起点处的轨道结构特征,从多帧所述轮廓数据中识别出尖轨起点,并获取相应的里程值;根据所述尖轨起点的里程值、以及预定的尖轨起点到各个所述目标检测位置处的距离,获取各个所述目标检测位置的里程值;根据各个所述目标检测位置的里程值分别从多帧所述轮廓数据提取出各个所述目标检测位置的轮廓数据。
8、本发明提供的道岔框架尺寸检测方法,还可以具有这样的技术特征,在所述定位提取步骤之前,还包括:数据采集步骤,通过轨道检测装置对道岔尖轨段的轨道进行数据采集,其中,多个所述线激光传感器和所述里程检测器都设置在所述轨道检测装置中,多个所述线激光传感器分别对应于所述尖轨段的轨道两侧,用于采集轨道同一断面的轮廓数据。
9、本发明提供的道岔框架尺寸检测方法,还可以具有这样的技术特征,其中,所述线激光传感器为至少六个,所述轨道检测装置的两侧分别设置有至少三个所述线激光传感器,当所述轨道检测装置设置在所述尖轨段的轨道上时,每侧的三个所述线激光传感器分别位于对应侧的基本轨的外侧上方、上方、内侧上方,并都朝向所述基本轨,在所述轨件区域定位步骤中,将对应侧的三个所述线激光传感器所采集的tuple点位数据转为相应的轮廓,并根据多个所述线激光传感器的标定参数将对应侧的三个所述线激光传感器的轮廓进行合并。
10、本发明提供的道岔框架尺寸检测方法,还可以具有这样的技术特征,在所述数据采集步骤之前,还包括:准备步骤,对所述轨道检测装置的多个所述线激光传感器进行联合标定,并对多个所述线激光传感器和所述里程检测器进行时间同步。
11、发明的作用与效果
12、根据本发明提供的道岔框架尺寸检测方法,轨件轮廓获取步骤、轨件区域定位步骤、轨头轮廓外接矩形获取步骤、框架尺寸计算步骤,其中,通过高精度线激光传感器采集的轮廓数据以及相应里程数据来自动定位到各个目标检测位置,并提取出相应的轮廓数据,然后根据目标检测位置处轨件的相对位置分布从提取出的轮廓数据中自动识别定位尖轨段的基本轨轨头区域(即尖轨斥离一侧)和基本轨头和尖轨轨头区域(即尖轨贴合基本轨一侧),再通过最小外接矩形来计算道岔框架尺寸,该方法操作方便、检测精度高,可适用于多种不同尺寸轨道,并且由于仅提取预定检测位置处的一帧轮廓来进行后续计算分析,而不需要根据轮廓数据进行三维建模、三维模型比对等运算,因此运算量非常小,有利于在轨道检测现场快速得到检测结果。
技术特征:1.一种道岔框架尺寸检测方法,其特征在于,基于多个线激光传感器采集的道岔尖轨段的轮廓数据以及里程检测器采集的里程数据计算多个预定的目标检测位置处的道岔框架尺寸,该方法包括以下步骤:
2.根据权利要求1所述的道岔框架尺寸检测方法,其特征在于:
3.根据权利要求1所述的道岔框架尺寸检测方法,其特征在于:
4.根据权利要求3所述的道岔框架尺寸检测方法,其特征在于:
5.根据权利要求3所述的道岔框架尺寸检测方法,其特征在于:
6.根据权利要求1所述的道岔框架尺寸检测方法,其特征在于:
7.根据权利要求1所述的道岔框架尺寸检测方法,其特征在于,在所述定位提取步骤之前,还包括:
8.根据权利要求7所述的道岔框架尺寸检测方法,其特征在于:
9.根据权利要求6所述的道岔框架尺寸检测方法,其特征在于,在所述数据采集步骤之前,还包括:
技术总结本发明提供一种包括轨件轮廓获取步骤、轨件区域定位步骤、轨头轮廓外接矩形获取步骤、框架尺寸计算步骤,其中,通过高精度线激光传感器采集的轮廓数据以及相应里程数据来自动定位到各个目标检测位置,并提取出相应的轮廓数据,然后根据目标检测位置处轨件的相对位置分布从提取出的轮廓数据中自动识别定位尖轨段的基本轨轨头区域和基本轨头和尖轨轨头区域,再通过最小外接矩形来计算道岔框架尺寸,该方法操作方便、检测精度高,可适用于多种不同尺寸轨道,并且由于仅提取预定检测位置处的一帧轮廓来进行后续计算分析,而不需要根据轮廓数据进行三维建模、三维模型比对等运算,运算量非常小,有利于在轨道检测现场快速得到检测结果。
技术研发人员:林川川,王江,张紫豪,王海涛,汤强,李吉俊,胡志强,曹飞
受保护的技术使用者:中原利达铁路轨道技术发展有限公司
技术研发日:技术公布日:2025/3/20