合成孔径雷达微波视觉三维成像方法与装置
本发明属于合成孔径雷达三维成像领域,特别涉及一种合成孔径雷达微波视觉三维成像方法与装置。
背景技术:
1、合成孔径雷达(sar)三维成像利用高度向上的多个相干观测形成合成孔径,进而获得第三维分辨能力。相比于传统的干涉sar,sar三维成像可以对叠掩目标进行分离,在测绘制图、防灾减灾等领域有较大的应用潜力和实用价值。
2、三维sar常见的体制有多航过的重轨层析模式和单航过的阵列干涉模式。一般而言,为了保证第三维合成孔径大小和分辨率,需要几十次重轨层析观测或几十个天线阵元。2012年,zhu等人基于压缩感知理论提出了sl1mmer稀疏三维成像算法,有效减少了sar三维成像所需的相干观测数量,可以仅利用十几个相干观测完成城市三维重建。然而,受在轨商业sar卫星数量和轨控能力的限制,仍然需要花费至少2-3个月的时间来获得同一地区的有效相干数据。而阵列干涉模式需要搭载十几个天线阵元使得其造价成本和系统复杂度都较大。这些问题极大限制了三维sar的推广应用。
技术实现思路
1、为解决上述技术问题,本发明提供了一种合成孔径雷达微波视觉三维成像方法与装置,充分利用sar图像或初始sar三维点云中的几何、极化等微波视觉信息作为约束,在迭代式的三维成像框架中实现少量观测下的高精度三维成像。
2、为实现上述目的,本发明采用的技术方案如下:
3、一种合成孔径雷达微波视觉三维成像方法,所述方法包括如下步骤:
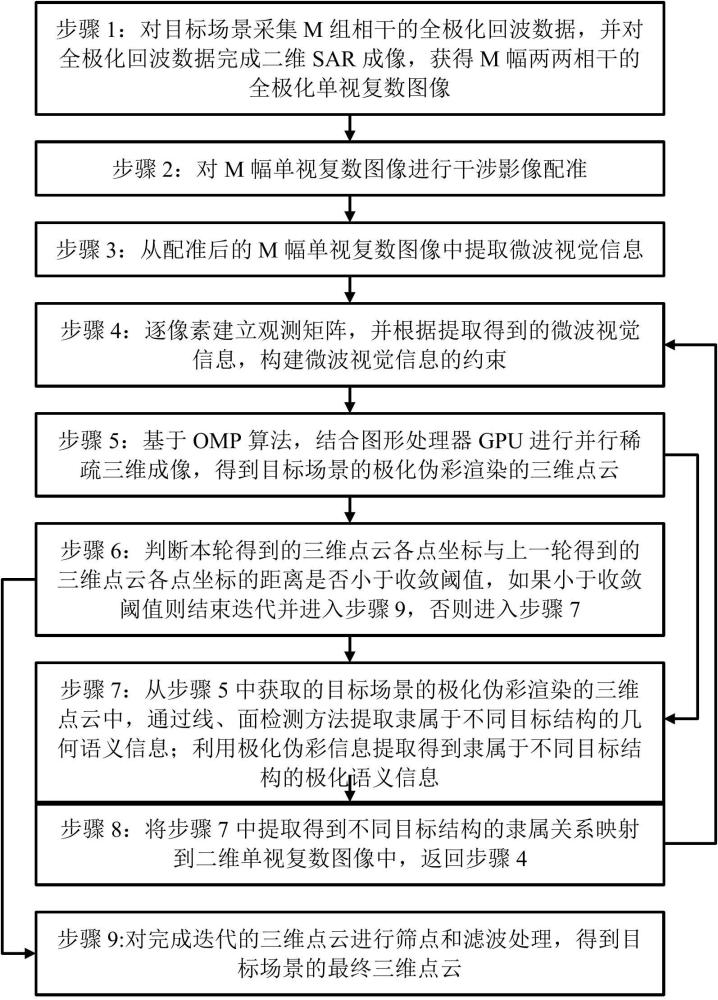
4、步骤1、对目标场景采集m组相干的全极化回波数据,并对全极化回波数据完成二维sar成像,获得m幅两两相干的全极化单视复数图像;
5、步骤2、对m幅单视复数图像进行干涉影像配准;
6、步骤3、从配准后的m幅单视复数图像中提取微波视觉信息;
7、步骤4、逐像素建立观测矩阵,并根据提取得到的微波视觉信息,构建微波视觉信息的约束;
8、步骤5、基于omp算法,结合图形处理器gpu进行并行稀疏三维成像,得到目标场景的极化伪彩渲染的三维点云;
9、步骤6、判断本轮得到的三维点云各点坐标与上一轮得到的三维点云各点坐标的距离是否小于收敛阈值,如果小于收敛阈值则结束迭代并进入步骤9,否则进入步骤7;
10、步骤7、从步骤5中获取的目标场景的极化伪彩渲染的三维点云中,通过线、面检测方法提取隶属于不同目标结构的几何语义信息;利用极化伪彩信息提取得到隶属于不同目标结构的极化语义信息;
11、步骤8、将步骤7中提取得到不同目标结构的隶属关系映射到二维单视复数图像中,返回步骤4;
12、步骤9、对完成迭代的三维点云进行筛点和滤波处理,得到目标场景的最终三维点云。
13、另一方面,本发明提供一种合成孔径雷达微波视觉三维成像装置,包括:
14、数据采集单元,用于对目标场景采集m组相干的全极化回波数据,并对全极化回波数据完成二维sar成像,获得m幅两两相干的全极化单视复数图像;
15、约束构建单元,用于对m幅单视复数图像进行干涉影像配准;从配准后的m幅单视复数图像中提取微波视觉信息;逐像素建立观测矩阵,并根据提取得到的微波视觉信息,构建微波视觉信息的约束;
16、最终三维点云构建单元,用于基于omp算法,结合图形处理器gpu进行并行稀疏三维成像,得到目标场景的极化伪彩渲染的三维点云,判断本轮得到的三维点云各点坐标与上一轮得到的三维点云各点坐标的距离是否小于收敛阈值,如果小于收敛阈值则结束迭代得到目标场景的最终三维点云;否则从获取的目标场景的极化伪彩渲染的三维点云中,通过线、面检测方法提取隶属于不同目标结构的几何语义信息,利用极化伪彩信息提取得到隶属于不同目标结构的极化语义信息,将提取得到不同目标结构的隶属关系映射到二维单视复数图像中,重新构建微波视觉信息的约束;对完成迭代的三维点云进行筛点和滤波处理,得到目标场景的最终三维点云。
17、第三方面,本发明提供一种电子设备,包括:一个或多个处理器;存储器,用于存储一个或多个程序;其中,当一个或多个程序被所述一个或多个处理器执行使,使得所述一个或多个处理器实现前述的一种合成孔径雷达微波视觉三维成像方法。
18、第四方面,本发明提供一种计算机可读存储介质,其上存储有可执行指令,该指令被处理器执行时能够使处理器实现前述的一种合成孔径雷达微波视觉三维成像方法。
19、本发明的有益效果在于:
20、本发明充分利用sar图像或初始sar三维点云中的几何、极化等微波视觉信息,在迭代式的三维成像框架中实现少量观测下的高精度三维成像,显著降低了sar三维成像的数据获取成本,有利于sar三维成像技术的推广应用;同时gpu的使用使得大规模稀疏成像任务可以在较短时间内完成。
技术特征:
1.一种合成孔径雷达微波视觉三维成像方法,其特征在于,所述方法包括如下步骤:
2.根据权利要求1所述的一种合成孔径雷达微波视觉三维成像方法,其特征在于,所述步骤2包括,确定一个主通道,利用干涉影像配准方法将其它通道影像与主通道影像进行配准。
3.根据权利要求2所述的一种合成孔径雷达微波视觉三维成像方法,其特征在于,所述干涉影像配准方法包括最大频谱法。
4.根据权利要求1所述的一种合成孔径雷达微波视觉三维成像方法,其特征在于,所述微波视觉信息包括几何语义信息、极化语义信息。
5.根据权利要求4所述的一种合成孔径雷达微波视觉三维成像方法,其特征在于,所述步骤3包括,在主通道图像中,利用线、面检测方法提取二维sar图像中隶属于不同目标结构的几何语义信息;利用全极化单视复数图像生成pauli伪彩图像,并从中根据极化散射特征提取得到隶属于不同目标结构的极化语义信息,所述极化散射特征包括邻域一致性、连续性、类内相关性。
6.根据权利要求1所述的一种合成孔径雷达微波视觉三维成像方法,其特征在于,所述步骤4中,构建的微波视觉信息约束为:
7.根据权利要求1所述的一种合成孔径雷达微波视觉三维成像方法,其特征在于,所述步骤5包括如下步骤:
8.一种合成孔径雷达微波视觉三维成像装置,其特征在于,包括:
9.一种电子设备,其特征在于,包括:
10.一种计算机可读存储介质,其特征在于,其上存储有可执行指令,该指令被处理器执行时能够使处理器实现权利要求1-7任一项所述的一种合成孔径雷达微波视觉三维成像方法。
技术总结
本发明公开了合成孔径雷达微波视觉三维成像方法与装置,属于合成孔径雷达三维成像领域。基于SAR图像或初始SAR三维点云中的微波视觉信息,提出了一套基于SAR微波视觉约束的迭代式三维成像方法;同时,针对稀疏三维成像中各像素点计算是独立的特点,使用图形处理器来对三维成像解算进行并行加速。相比于传统方法,本方法在引入微波视觉信息后,可以在少量相干观测数的条件下实现高精度三维成像,并在迭代中进一步提升成像精度;同时,图形处理器的使用减少了稀疏三维成像所需要的时间。
技术研发人员:仇晓兰,罗一通,颜千程,宋舒洁,焦泽坤,丁赤飚
受保护的技术使用者:中国科学院空天信息创新研究院
技术研发日:
技术公布日:2025/1/2
- 还没有人留言评论。精彩留言会获得点赞!