一种地外微小巡视探测器地形自主感知方法与流程
本发明涉及一种地外微小巡视探测器地形自主感知方法,属于深空探测器控制。
背景技术:
1、在深空探测任务中,巡视探测是实现近距离探测并扩大探测范围的有效途径。地外星表探测要求巡视器能够在未知复杂的星表环境中实现安全行驶并到达地面指定的目标点,以完成特定的科学考察任务。为满足上述任务需求,巡视器需实现位姿确定、环境感知、路径规划、运动控制和健康管理等功能。其中环境感知是决定自主智能水平的核心能力,也是影响探测安全性的关键,因为一旦驶入危险地形极易导致巡视器损坏。
2、目前,星表障碍检测与识别主要采用主动式或被动式的光学敏感器拍摄星表地形数据,对其进行处理转换为具有地形特征和坡度信息的dem高程图。基于主动传感器的检测方法主要依靠激光雷达等设备,利用雷达主动发出信息并通过返回信号确定探测区域地形的详细三维高程信息,从而确定障碍危险区域。被动敏感器如光学相机,具有尺寸小、重量轻、成本低、能耗较小的特点,主要通过特征提取算法从二维图像中提取障碍的相关特征来进行检测。对于未来微小巡视器探测任务,受重量功耗和严苛环境的约束,基于激光雷达的障碍识别方法难以适用,此外基于双目立体视觉的环境感知技术双目匹配计算量大,处理速度慢,难以实现高效感知。因此如何在有限资源约束下,准确感知并识别严苛复杂且未知的地外环境,值得进一步研究。
技术实现思路
1、本发明解决的技术问题是:克服现有技术的不足,提出了一种地外微小巡视探测器地形自主感知方法,构建探测区域深度理论模型,实现极低视角下仅利用测距信息的障碍检测,满足星表巡视探测等任务的需要。
2、本发明的技术解决方案是:
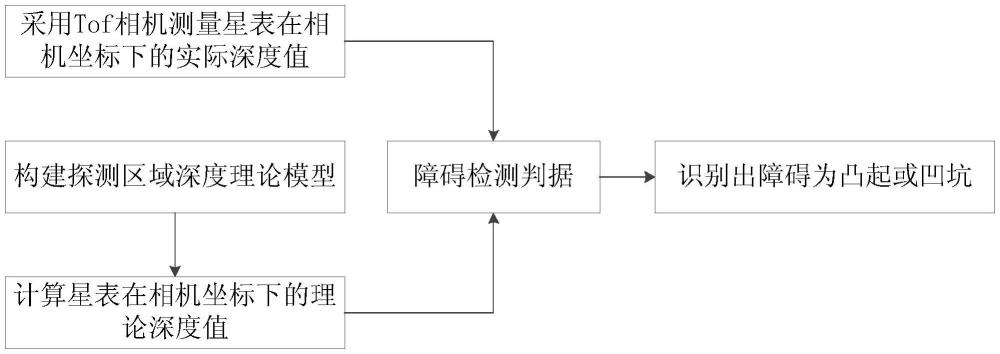
3、一种地外微小巡视探测器地形自主感知方法,包括:
4、采用tof相机测量星表在相机坐标下的实际深度值;
5、基于单目相机成像原理构建探测区域深度理论模型,基于所述模型,计算星表在相机坐标下的理论深度值;
6、基于得到的实际深度值和理论深度值,设计障碍检测判据;根据障碍检测判据检测探测区域障碍,并识别出障碍为凸起或凹坑。
7、进一步地,采用tof相机测量星表在相机坐标下的实际深度值,实际深度值为:
8、星表探测区域任一点(i,j)与相机的距离值di,j:
9、
10、其中,di,j为星表探测区域任一点(i,j)与相机的距离值,即实际深度值;c为光速;λ为信号的调制频率;δφi,j表示tof相机发射器和接收器之间的相位差。
11、进一步地,基于单目相机成像原理构建探测区域深度理论模型,所述模型为:
12、
13、式中:
14、
15、其中,di,j为星表探测区域任一点(i,j)处理论深度值;αint表示相机水平安装角,h和w分别表示图像高度和宽度,u表示像元尺寸,f表示焦距,height表示相机安装高度。
16、进一步地,基于得到的实际深度值和理论深度值,设计的障碍检测判据为:
17、di,j-di,j>th1,此处像素值置为a;
18、di,j-di,j<th2,此处像素值置为b;
19、否则,此处像素值置为c;
20、其中,di,j、di,j为星表探测区域任一点(i,j)的实际深度值与理论深度值,th1和th2分别表示障碍判断阈值;a、b、c取值0~255,a<c<b。
21、进一步地,th1和th2分别取值为0.05和-0.05。
22、进一步地,a、b、c取值为0,255,128。
23、进一步地,通过连通域分析,识别像素值为a的区域为凹坑,像素值为b的区域为凸起。
24、本发明与现有技术相比的优点在于:
25、(1)本发明基于星表深度测量理论模型完成探测区域障碍检测方法设计,有效增强了有限资源下微小巡视器感知能力。
26、(2)相比现有的双目立体视觉和激光雷达的感知方法,本发明考虑了计算资源及巡视器尺寸重量等约束,节省了能源,更适用于小型化巡视探测任务。
技术特征:
1.一种地外微小巡视探测器地形自主感知方法,其特征在于,包括:
2.根据权利要求1所述的一种地外微小巡视探测器地形自主感知方法,其特征在于,采用tof相机测量星表在相机坐标下的实际深度值,实际深度值为:
3.根据权利要求1所述的一种地外微小巡视探测器地形自主感知方法,其特征在于,基于单目相机成像原理构建探测区域深度理论模型,所述模型为:
4.根据权利要求1所述的一种地外微小巡视探测器地形自主感知方法,其特征在于,基于得到的实际深度值和理论深度值,设计的障碍检测判据为:
5.根据权利要求4所述的一种地外微小巡视探测器地形自主感知方法,其特征在于,th1和th2分别取值为0.05和-0.05。
6.根据权利要求4所述的一种地外微小巡视探测器地形自主感知方法,其特征在于,a、b、c取值为0,255,128。
7.根据权利要求4所述的一种地外微小巡视探测器地形自主感知方法,其特征在于,通过连通域分析,识别像素值为a的区域为凹坑,像素值为b的区域为凸起。
技术总结
本发明公开了一种地外微小巡视探测器地形自主感知方法,属于深空探测器控制技术领域。该方法采用Tof相机测量星表在相机坐标下的实际深度值,构建探测区域深度理论模型并计算星表在相机坐标下的理论深度值;基于得到的实际深度值和理论深度值,设计障碍检测判据;根据障碍检测判据检测探测区域障碍,并识别出障碍为凸起或凹坑。本发明针对有限资源下微小巡视器难以实现有效感知的问题,实现极低视角下仅利用测距信息的障碍检测,满足星表巡视探测等任务的需要。
技术研发人员:高锡珍,邢琰,滕宝毅,胡勇,王泽昕
受保护的技术使用者:北京控制工程研究所
技术研发日:
技术公布日:2025/4/17
- 还没有人留言评论。精彩留言会获得点赞!