一种北斗、惯导与视觉协同的地下管道机器人定位方法与流程
本发明属于计算机视觉,特别涉及一种北斗、惯导与视觉协同的地下管道机器人定位方法。
背景技术:
1、随着城市基础现代化建设的快速发展,地下管道的建设越来越密集,属于国家基础设施网络的重要组成部分。但是在地下管道的使用过程,管道内部出现异常的问题时有发生,会严重影响设施安全和功能,需要定期对其进行检测。由于地下管道建设的隐蔽性和困难性,管道机器人的定位成为一个困扰技术人员的问题。因此,如何精确快速地实现管道内机器人的定位成为需要研究的技术问题。
技术实现思路
1、为了解决上述问题,本发明提供一种北斗、惯导与视觉协同的地下管道机器人定位方法,能够精确快速地实现管道内机器人的定位。
2、本发明具体为一种北斗、惯导与视觉协同的地下管道机器人定位方法,所述地下管道机器人定位方法包括以下步骤:
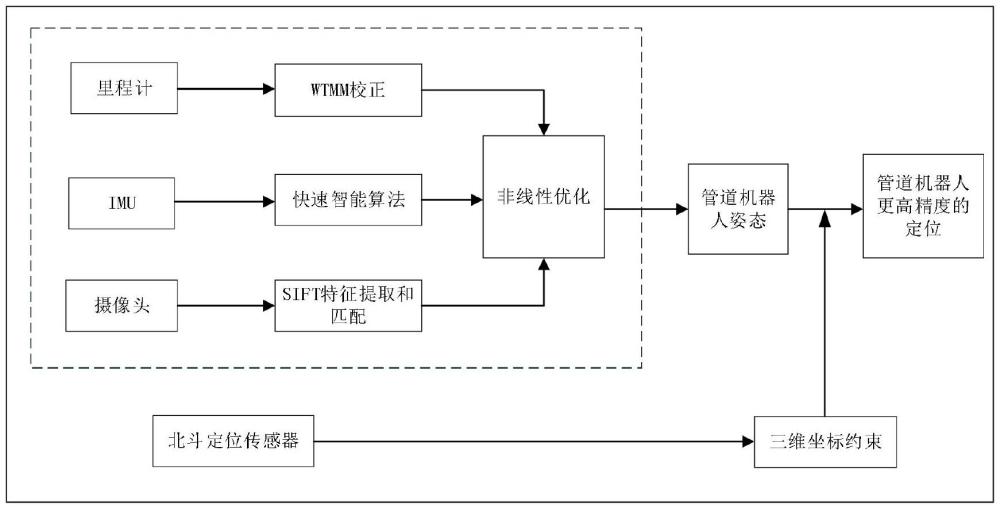
3、步骤s1:利用imu、里程计、双目相机和北斗定位传感器实时获取管道机器人的加速度、角速度、里程、机器人周围的环境信息和卫星定位信息;
4、步骤s2:利用快速智能方法将imu的加速度计输出作为观测值更新角速度信息;
5、步骤s3:利用小波变换模量极大值法和imu的加速度数据识别管道连接点,然后对里程计的输出进行校正。最后利用角速度和里程信息初步估计管道机器人的位姿信息;
6、步骤s4:标定相机与imu的外参,对相机拍摄的图像序列进行sift特征点的检测和特征点的描述,匹配特征点对;
7、步骤s5:通过紧耦合的方式融合步骤s2获得的角速度、步骤s3获得的里程信息和步骤s4获得的匹配特征点对信息,通过非线性优化得到精度更高的机器人位姿信息;
8、步骤s6:根据北斗定位传感器返回的三维位置信息约束步骤s5中获得的机器人位姿信息,消除机器人位姿估计的累计误差,实现管道机器人的精准定位。
9、与现有技术相比,本发明的有益效果是:
10、(1)本发明提出利用imu、里程计、相机进行协同处理获取精度较高的管道机器人定位结果,结合了imu为快速运动提供了较好的位姿估计,视觉传感器能在慢速运动中修正imu数据漂移的优点,解决了相机传感器在纹理弱的管道环境内难以进行有效位姿估计的问题。
11、(2)本发明首先利用快速智能算法将imu的加速度计输出作为观测值更新角速度信息,减小角速度测量噪声和积分导致的误差,再融合角速度和里程信息的预积分,使得后续的机器人位姿估计更加简单,结果更加准确。
12、(3)本发明首先利用小波变换模量极大值法对加速度数据进行处理从而识别出管道连接点,然后利用已知的每节管道长度来对里程信息进行校正。
13、(4)本发明在imu、里程计、相机传感器协同估计机器人位姿的基础上加入了位姿图优化算法,考虑全局的机器人位姿约束,利用位姿图优化再次修正管道机器人的位姿估计。
14、(5)由于管道机器人的位姿估计存在累积误差,随着时间的推移,管道机器人的定位结果会发生漂移。本发明根据北斗定位传感器返回的三维位置信息约束imu、里程计、视觉传感器协同求得的机器人位姿,消除机器人位姿估计的累计误差,能够实现管道机器人的精准定位。
技术特征:
1.一种北斗、惯导与视觉协同的地下管道机器人定位方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的一种北斗、惯导与视觉协同的地下管道机器人定位方法,其特征在于,步骤s1包括:机器人前方安装双目相机和北斗定位传感器,质心处安装imu并在主动轮上安装里程计。
3.根据权利要求1所述的一种北斗、惯导与视觉协同的地下管道机器人定位方法,其特征在于,步骤s2包括:
4.根据权利要求1所述的一种北斗、惯导与视觉协同的地下管道机器人定位方法,其特征在于,步骤s3包括:
5.根据权利要求1所述的一种北斗、惯导与视觉协同的地下管道机器人定位方法,其特征在于,步骤s4包括:
6.根据权利要求1所述的一种北斗、惯导与视觉协同的地下管道机器人定位方法,其特征在于,步骤s5包括:
7.根据权利要求1所述的一种北斗、惯导与视觉协同的地下管道机器人定位方法,其特征在于,步骤s6包括:
技术总结
本发明公开了一种北斗、惯导与视觉协同的地下管道机器人定位方法,首先利用惯性测量单元获取机器人的加速度、角速度信息并对其输出进行校正,利用里程计获取机器人的里程数据并识别管道连接点从而对其的输出进行校正,然后融合角速度和里程信息实现对管道机器人的位姿状态初步预测;接着对IMU和视觉传感器进行内外参标定,并对捕获到的每一帧图像进行SIFT特征提取和匹配;然后,以紧耦合的方式融合IMU、里程信息和双目相机的数据,利用非线性优化方法得到精度更高的机器人位姿信息;最后利用北斗定位传感器返回的三维位置信息进行姿态约束,获取局部准确和全局无漂移的机器人位姿信息,实现管道机器人的精准定位。
技术研发人员:冯兴明,成云朋,柏晶晶,胥峥,王瀚,陆烨,郑杨,邓啸巍,丁亚杰,陈诚,吴燔,杨鑫泽,钱程蔚,高辉
受保护的技术使用者:国网江苏省电力有限公司盐城供电分公司
技术研发日:
技术公布日:2025/4/7
- 还没有人留言评论。精彩留言会获得点赞!