一种风电螺栓巡检机器人的制作方法
本技术属于风电螺栓预紧力检测领域,尤其涉及一种风电螺栓巡检机器人。
背景技术:
1、目前检测风电螺栓的预紧力可以通过以下几种方法:
2、传统的机械式检测方法:通过使用千分表、百分表等机械测量工具,对螺栓的伸长量进行测量,从而间接计算出螺栓的预紧力。这种方法操作简单,但精度较低,且容易受到人为因素的影响。
3、电阻应变片技术:通过在螺栓上粘贴电阻应变片,测量螺栓在拉伸过程中电阻的变化,从而推算出螺栓的预紧力。该方法精度较高,但操作过程较为繁琐,且需要专门的技术人员进行数据处理和分析。
4、超声波检测技术:超声波检测技术有电磁超声和压电超声两种方式,电磁超声检测方法利用超声波在固体中的传播特性,通过测量螺栓中超声波的传播时间或振幅等参数,来推算出螺栓的预紧力。该方法具有非接触、无损、快速等优点,但设备成本较高,且需要专门的技术人员进行操作和数据处理。压电超声激发信号强、信噪比高、硬件电路简单、使用方便,但需要耦合剂和表面预处理。
5、磁感应检测技术:利用磁感应原理,通过测量螺栓中磁感应强度的变化来推算出螺栓的预紧力。该方法具有非接触、无损、简单等优点,但精度较低,且容易受到环境因素的影响。
6、现有的利用电阻应变片技术或超声波检测技术的风电螺栓预紧力检测设备,比如手持式超声波检测设备,在实际使用中都存在固有的不足或者缺陷:
7、1、手持式检测设备效率低,检测的全过程都需要人操作,没办法实现自动检测。
8、2、市面部分产品采用干耦合测量,测量准确率较低。
9、3、市面部分产品采用粘贴应变片的方法,需要提前对螺栓进行贴片,并对每颗螺栓进行拉力标定。现场测试时,需要把贴片的螺栓安装在需要测试的螺栓孔位置。这种方法,测试前期需要贴片和标定;现场安装时需要将贴片的螺栓安装在特定位置,成本较高,实施比较麻烦。
技术实现思路
1、本实用新型的目的在于解决手动检测效率低,干耦合测量准确率低,并提出一种风电螺栓巡检机器人。
2、为了达到上述目的,本实用新型提供的技术方案为:
3、一种风电螺栓巡检机器人,包括机身、移动机构、视距采集机构、超声波探头和滑台,所述移动机构安装在机身上,所述视距采集机构朝下安装在机身上,所述滑台包括水平移动的滑台和垂直移动的滑台,所述水平移动的滑台安装在机身上,所述垂直移动的滑台安装在水平移动的滑台上,所述超声波探头朝下固定在垂直移动的滑台上,所述视距采集机构包括测距传感器、工业相机和补光灯,所述测距传感器和工业相机朝下安装在机身上,所述补光灯安装在工业相机下方。
4、进一步的,所述机身包括c形板和抬高架,所述c形板安装在抬高架上方,所述移动机构、水平移动的滑台、测距传感器和工业相机安装在c形板上。
5、进一步的,所述移动机构包括驱动轮、从动轮和支撑轮,所述驱动轮、从动轮为磁力轮,所述驱动轮、从动轮安装在c形板上,所述支撑轮安装在抬高架的下端。
6、进一步的,还包括耦合剂容器和齿轮泵,所述耦合剂容器和齿轮泵安装在机身上,所述耦合剂容器通过管道与齿轮泵连接,所述齿轮泵通过管道与超声波探头连接,所述超声波探头具有耦合剂通道。
7、进一步的,所述超声波探头包括探头外壳、连接铜块、超声波换能器、第一探头电极和第二探头电极,所述探头外壳包括连接环和连接板,所述连接板固定于连接环的外侧,所述连接环的内壁围成上下贯通的连接通孔,所述连接板上开有耦合剂流入孔,所述耦合剂流入孔与连接通孔相连通,所述连接铜块通过过盈配合方式固定在连接环内,所述连接铜块的上部的外侧开设有环形凹槽,所述耦合剂流入孔的一端与环形凹槽相接,所述连接铜块的中部的外侧开设有多个竖直凹槽,所述多个竖直凹槽的上端与环形凹槽相连通,所述多个竖直凹槽与连接环的内壁形成多个耦合剂流出孔,所述超声波换能器与连接铜块固定,所述第一探头电极和第二探头电极穿过探头外壳和连接铜块,第一探头电极的下端与超声波换能器的外壳接触,第二探头电极的下端与超声波换能器的中心固定连接,所述齿轮泵通过管道与所述耦合剂流入孔连接,所述耦合剂通道为从耦合剂流入孔经过环形凹槽到耦合剂流出孔形成的通道。
8、进一步的,所述超声波探头还包括吸附磁铁和磁敏传感器,所述吸附磁铁通过过盈配合方式固定在连接环的外侧,所述磁敏传感器安装在连接板的下侧。
9、进一步的,还包括温度传感器,所述温度传感器安装在机身上。
10、进一步的,还包括倾倒传感器,所述倾倒传感器安装在机身上。
11、进一步的,所述机身上还安装有wifi天线和储存单元。
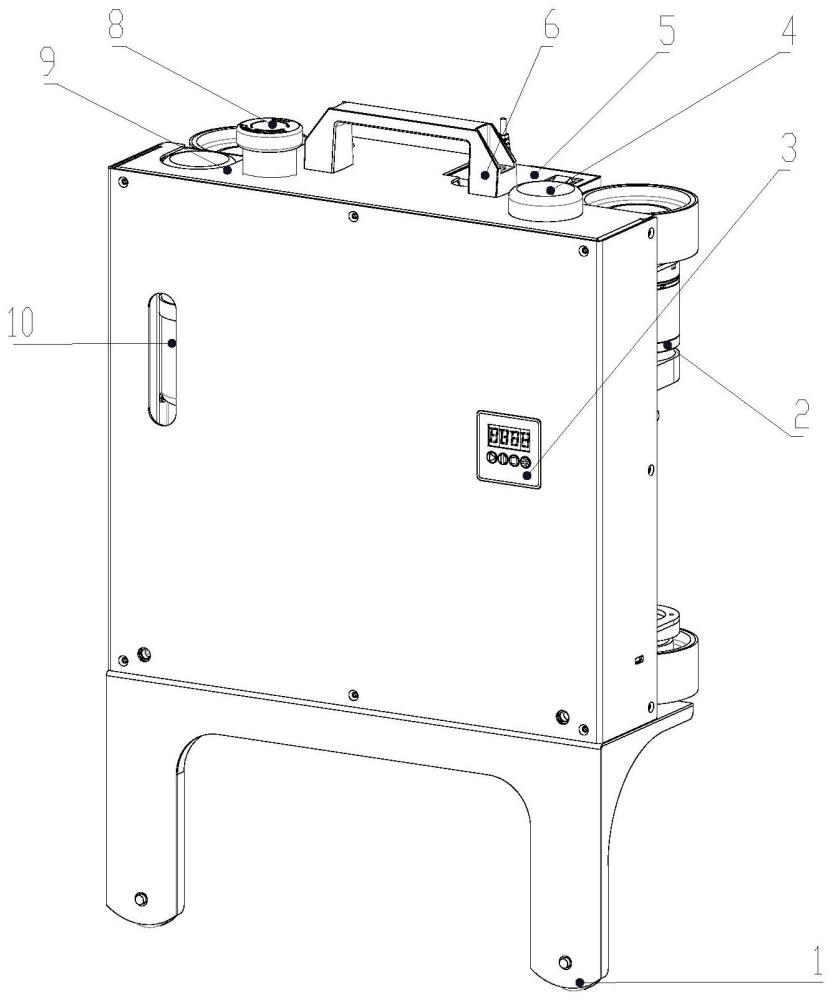
12、进一步的,所述机身外安装有背板,所述背板与机身固定,所述背板上安装有提手、数显按键面板、开关按钮和急停按钮,所述背板上开有长孔,所述长孔位于耦合剂容器旁边。
13、本实用新型与现有技术相比,其显著优点为:1、本实用新型可以测距传感和视觉反馈,实时调整机器人的姿态和探头的位置,实现全过程的自动检测。2、本实用新型的超声波探头有自动喷耦合剂的功能,相对干耦合测量方法更准确,相对预埋贴片测量,成本更低,实施更方便。同时能实时采集温度信息,对测量结果进行补偿。3、本实用新型通过无线网络进行实时上传,同时机器人内部也设有储存单元,对测量数据进行备份,机器人还可以通过网络和外部进行远程通信,实时监控现场数据。
技术特征:
1.一种风电螺栓巡检机器人,其特征在于,包括机身、移动机构、视距采集机构、超声波探头和滑台,所述移动机构安装在机身上,所述视距采集机构朝下安装在机身上,所述滑台包括水平移动的滑台和垂直移动的滑台,所述水平移动的滑台安装在机身上,所述垂直移动的滑台安装在水平移动的滑台上,所述超声波探头朝下固定在垂直移动的滑台上,所述视距采集机构包括测距传感器、工业相机和补光灯,所述测距传感器和工业相机朝下安装在机身上,所述补光灯安装在工业相机下方。
2.根据权利要求1所述的风电螺栓巡检机器人,其特征在于,所述机身包括c形板和抬高架,所述c形板安装在抬高架上方,所述移动机构、水平移动的滑台、测距传感器和工业相机安装在c形板上。
3.根据权利要求2所述的风电螺栓巡检机器人,其特征在于,所述移动机构包括驱动轮、从动轮和支撑轮,所述驱动轮、从动轮为磁力轮,所述驱动轮、从动轮安装在c形板上,所述支撑轮安装在抬高架的下端。
4.根据权利要求1所述的风电螺栓巡检机器人,其特征在于,还包括耦合剂容器和齿轮泵,所述耦合剂容器和齿轮泵安装在机身上,所述耦合剂容器通过管道与齿轮泵连接,所述齿轮泵通过管道与超声波探头连接,所述超声波探头具有耦合剂通道。
5.根据权利要求4所述的风电螺栓巡检机器人,其特征在于,所述超声波探头包括探头外壳、连接铜块、超声波换能器、第一探头电极和第二探头电极,所述探头外壳包括连接环和连接板,所述连接板固定于连接环的外侧,所述连接环的内壁围成上下贯通的连接通孔,所述连接板上开有耦合剂流入孔,所述耦合剂流入孔与连接通孔相连通,所述连接铜块通过过盈配合方式固定在连接环内,所述连接铜块的上部的外侧开设有环形凹槽,所述耦合剂流入孔的一端与环形凹槽相接,所述连接铜块的中部的外侧开设有多个竖直凹槽,所述多个竖直凹槽的上端与环形凹槽相连通,所述多个竖直凹槽与连接环的内壁形成多个耦合剂流出孔,所述超声波换能器与连接铜块固定,所述第一探头电极和第二探头电极穿过探头外壳和连接铜块,第一探头电极的下端与超声波换能器的外壳接触,第二探头电极的下端与超声波换能器的中心固定连接,所述齿轮泵通过管道与所述耦合剂流入孔连接,所述耦合剂通道为从耦合剂流入孔经过环形凹槽到耦合剂流出孔形成的通道。
6.根据权利要求5所述的风电螺栓巡检机器人,其特征在于,所述超声波探头还包括吸附磁铁和磁敏传感器,所述吸附磁铁通过过盈配合方式固定在连接环的外侧,所述磁敏传感器安装在连接板的下侧。
7.根据权利要求1所述的风电螺栓巡检机器人,其特征在于,还包括温度传感器,所述温度传感器安装在机身上。
8.根据权利要求1所述的风电螺栓巡检机器人,其特征在于,还包括倾倒传感器,所述倾倒传感器安装在机身上。
9.根据权利要求1所述的风电螺栓巡检机器人,其特征在于,所述机身上还安装有wifi天线和储存单元。
10.根据权利要求1所述的风电螺栓巡检机器人,其特征在于,所述机身外安装有背板,所述背板与机身固定,所述背板上安装有数显按键面板,所述背板上开有长孔,所述长孔位于耦合剂容器旁边。
技术总结
本技术属于风电螺栓预紧力检测领域,尤其涉及一种风电螺栓巡检机器人。本技术包括机身、移动机构、视距采集机构、超声波探头和滑台,移动机构和滑台安装在机身上,视距采集机构朝下安装在机身上,滑台包括水平移动的滑台和垂直移动的滑台,水平移动的滑台安装在机身上,垂直移动的滑台安装在水平移动的滑台上,超声波探头朝下固定在水平移动的滑台上,移动机构包括驱动轮、从动轮和支撑轮,驱动轮、从动轮为磁力轮,驱动轮和从动轮位于水平方向的两侧,支撑轮安装在垂直方向的下侧,视距采集机构包括测距传感器。本技术可以测距传感和视觉反馈,实时调整机器人的姿态和探头的位置,实现全过程的自动检测。
技术研发人员:林园,伍乾坤,张保印,张贤林,祝逸浩,陈文俊,周乃义,娄琪,胡倩,袁祖瑞,邹跃华
受保护的技术使用者:中电海康集团有限公司
技术研发日:20240126
技术公布日:2024/9/26
- 还没有人留言评论。精彩留言会获得点赞!